
国際特許分類[B25J15/06]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | 把持部 (1,686) | 真空または磁力把持装置をもつもの (534)
国際特許分類[B25J15/06]に分類される特許
21 - 30 / 534
ロボットハンド
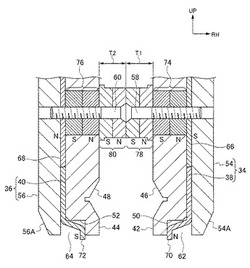
【課題】マグネット部に永久磁石を用いてもワークの重量に対応してワークに対する吸着力を高くする。
【解決手段】ロボットハンド10では、互いに対向する磁極が反対になるようにマグネット部74、76が配置されており、ハンド部34、36が閉位置に移動された際に、スペーサ78、80が互いに当接して、マグネット部74、76が互いに連結される。これにより、スペーサ80からスペーサ78へ向かう磁力線は、スペーサ80、78の間の空気を介さずに、スペーサ78、80内を高密度で伝搬されるため、吸着部70、72における磁力線が多くなり、吸着部70、72の磁力が強くなる。したがって、ハンド部34、36が閉位置以外の位置に配置された際に比べて閉位置に配置された際に、ワークに対する吸着力が高くなる。これにより、マグネット部74、76に永久磁石を用いても、ワークの重量に対応してワークに対する吸着力を高くできる。
(もっと読む)
小物ワーク用保持・搬送装置

【課題】極小サイズのカメラレンズ等、真空吸引チャックの気密接触に必要な辺縁スペース部分が得られない小物ワークを保持・搬送する装置を安価に提供する。
【解決手段】保持搬送装置1の先端にワークを押し付け保持するためのワークストッパー4とワーク位置決めのためのガイド3を備え、ワーク背面より保持装置側に向かう流体流発生のため流体を噴出または吸引する開口5を具備している。
(もっと読む)
真空吸着ノズル組み立て体
【課題】 実装する工程の中で、真空吸着ノズルが空気との摩擦によって帯電し、小型化し軽量になった電子部品が帯電した真空吸着ノズルの静電気との反発力によって吸着位置から吹き飛ぶという問題が発生するようになり、酷い場合には電子部品が静電破壊するという問題があった。
【解決手段】 先端に吸着面2を備えたセラミックスからなる真空吸着ノズル1の後端がフランジ10の受け部11に接着された真空吸着ノズル組み立て体7であって、真空吸着ノズル1とフランジ10との接着部がセラミックスの焼き肌面8が接着された部位と研削面9が接着された部位とを含み、真空吸着ノズル組み立て体7の抵抗値が103〜1011Ωである。接着部で強固な接着が得られ、また、電子部品15の吹き飛びや静電破壊を防止することができる。
(もっと読む)
離型装置
【課題】構造が簡易で、成形物の多数個取りにも適用することができる離型装置を提供する。
【解決手段】成形物を型から取り出す離型装置であって、成形物を吸着する吸着パッド10と、成形物を吸着した吸着パッド10を直線上で移動させることにより、成形物を型から取り出す駆動部7と、を備え、吸着パッド10は、可撓性の中空部材であって、内部を負圧とすることによって吸着口14に成形物を吸着させる形状であって、且つ、成形物を前記型から取り出す際に、吸着口14に吸着された成形物にかかる荷重が偏る形状である。
(もっと読む)
吸着装置
【課題】被吸着物を吸着するための磁気を電力を消費することなく発生し、被吸着物の吸着及びその解除をすることができる吸着装置を提供することを目的とする。
【解決手段】被吸着物90を磁気で吸着する吸着装置1であって、磁気を発生するための永久磁石2と、永久磁石2のN極に連結されていて、被吸着物90に接触させる磁性体製の吸着部3と、永久磁石2を取り囲む磁性体製の制御筒5と、永久磁石2と制御筒5との位置関係を相対的に移動させるためのスライド機構6とを備えるものである。
(もっと読む)
真空吸着装置、及びロボット
【課題】真空吸着装置において、真空ポンプを吸着用および離脱用のポンプとして兼用する場合であっても、異常発生時において吸着パッドによる吸引力の低下を抑制する。
【解決手段】真空吸着装置20は、真空ポンプ21と、吸着パッド26と、真空ポンプ21の吸引口21iと吸着パッド26とを接続する吸引通路31,33及び共通通路35と、真空ポンプ21の排出口21eと吸着パッド26とを接続する排出通路32,34及び共通通路35と、電磁弁41,42と、を備える。電磁弁41において、非励磁状態は、第2吸引通路33における電磁弁41側の端部33aを閉塞させる状態であり、励磁状態は第1吸引通路31と第2吸引通路33とを連通させる状態である。電磁弁42において、非励磁状態は、第2排出通路34における電磁弁42側の端部34aを閉塞させる状態であり、励磁状態は第1排出通路32と第2排出通路34と連通させる状態である。
(もっと読む)
搬送アームおよびそれを用いた吸着装置
【課題】
本発明は、試料の汚染低減の要求に応える搬送アームおよびそれを用いた吸着装置を提供するものである。
【解決手段】
本発明の一形態に係る搬送アーム1は、セラミックスからなるアーム本体2と、該アーム本体2の表面を被覆し、試料の載置領域6を有する被覆膜3とを備え、該被覆膜3は、導電性ポリエーテルエーテルケトン樹脂からなる。
また、本発明の一形態に係る吸着装置は、上記搬送アーム1を試料の吸着手段および搬送手段として用いる。
(もっと読む)
形状自在な吸着グリッパ
【課題】横向きに使用してもワークの把持を正確に行うことができる形状自在な吸着グリッパを提供する。
【解決手段】一端に受圧面11aを有する固定部材11と、受圧面11aに密着して取り付けられ、内部に粒体12bを充填させた可撓性かつ気密性の中空バッグ12aを有する把持部12と、中空バッグ12aを横向きにした場合において、中空バッグ12aを鉛直下方向から支え、かつ、固定部材11に接続されている自重支え12cと、中空バッグ12a内の圧力を所定負圧に減圧しかつ大気圧に戻すことができる減圧装置9とを有しており、中空バッグ12aは、ワーク6の受圧面11aに対向する面に対して押し付ける押付力によって、その接触部分におけるワークの形状にならうようになっている。
(もっと読む)
形状自在な吸着グリッパ
【課題】把持に関与しない部位を排除した効率的な構造を有する形状自在な吸着グリッパを提供する。
【解決手段】一端に受圧面11aを有する固定部材11と、受圧面11aに密着して取り付けられ、内部に粒体12bを充填させた可撓性かつ気密性の中空バッグ12aを有する把持部12と、中空バッグ12a内の圧力を所定負圧に減圧しかつ大気圧に戻すことができる減圧装置9とを有し、中空バッグ12aは、ワーク6の固定部材11に対向する面に対して押し付ける押付力によって、その接触部分におけるワークの形状にならうようになっており、かつ、半球形状になっている。
(もっと読む)
物品吸着保持装置
【課題】吸着体による物品の吸着と吸着体の移動とを行なう保持手段の配管の簡素化を図る。
【解決手段】エアシリンダ22のピストンロッド34に配設した吸着体20の吸着パッド38は、ピストンロッド34の通気路34aを介して第1圧力室40に連通する。エジェクタ48Aは、第1スピードコントローラ50を介して第1圧力室40に連通すると共に、第2スピードコントローラ52を介して第2圧力室42に連通する。第2圧力室42に、第3スピードコントローラ54が連通する。3基のスピードコントローラ50,52,54の絞り調節により、下降した吸着体20で物品10を吸着した際に、第1圧力室40の負圧でピストンロッド34が収縮作動して吸着体20が取上げ位置まで上昇する。そして、第1圧力室40の負圧を解除することで、吸着体20による物品10の吸着は解除される。
(もっと読む)
21 - 30 / 534
[ Back to top ]