
国際特許分類[B25J15/06]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | 把持部 (1,686) | 真空または磁力把持装置をもつもの (534)
国際特許分類[B25J15/06]に分類される特許
41 - 50 / 534
基板移載装置
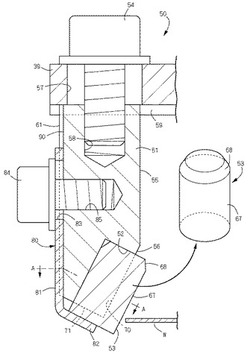
【課題】ベルヌーイチャックで吸引保持した基板を、規制体で所定姿勢に位置保持する基板移載装置において、規制体の規制機能の回復をより少ない手間で簡便に行うことができるようにする。
【解決手段】基板Wの表面に平行な方向の滑り移動を規制するガイド53をガイド取付部材51に対して着脱自在に構成する。これにより、規制体50の全体の交換を要することなく、ガイド53のみを交換するだけで、規制体50の規制機能を回復することができる。従って、規制体50の全体を交換する形態に比べて、規制体50の規制機能の回復に要する費用や手間を抑えることができる。
(もっと読む)
形状自在な吸着グリッパとこれによる把持方法

【課題】ワークの形状及び大きさによらずに確実にワークを把持することを可能とする吸着グリッパを提供する。
【解決手段】一端に受圧面11aを有する固定部材11と、受圧面11aに密着して取り付けられ、内部に粒体12bを充填させた可撓性かつ気密性の中空バッグ12aを有する把持部12とを有し、中空バッグ12aは、把持部12を鉛直下向きにした場合において中心部を鉛直方向に貫通した減圧空間17と減圧空間17を取り囲む中空バッグ内部空間とを有し、かつ、ワーク6の固定部材11に対向する面に対して押し付ける押付力によって、その接触部分におけるワークの形状にならうようになっており、さらに、減圧空間17及び中空バッグ内部空間の圧力を所定負圧に減圧しかつ大気圧に戻すことができる減圧装置9を有する。
(もっと読む)
棒状部材の搬送装置
【課題】複雑な機構を利用せずに、ランダムに配置された棒状部材を逐次的に効率よく取出し、取出した棒状部材を所定の場所に搬送することができる搬送装置の提供。
【解決手段】吸引装置18は、ロボットハンド22に取付けられたノズル24を有し、取出し対象の棒状部材14aの第1の円柱状部分30の端部にノズル24を接近させ、第1の円柱状部分30をノズル24内に吸引しながら、ノズル24を上昇させて棒状部材14aを保持するように構成されている。
(もっと読む)
シート吸着装置
【課題】シートのバタつきを抑制し、吸着の安定化を図ることができるシート吸着装置の提供。
【解決手段】吸着面2に形成された溝10に沿って空気を流通させることによりエゼクタ効果を発現させ、シートSを吸着面2に吸着するシート吸着装置1であって、溝10における上記空気の流通経路の終端部10bにおいて、上記空気を回収する回収部30を有するという構成を採用する。
(もっと読む)
フィルム吸着装置
【課題】フィルムの引き離しを容易に行うことができるフィルム吸着装置の提供。
【解決手段】フィルムAの上面を吸着するフィルム吸着装置1であって、長さ方向に複数の圧力室12を有すると共に、複数の圧力室12とそれぞれ独立して連通し且つ上記長さ方向の両端部の間において膨出した吸着面10aを有する真空チャック10と、吸着面10aをフィルムAの上面に対して上記長さ方向の両端部のうち一方の端部から他方の端部まで順次接触させるハンド装置と、を有するフィルム吸着装置1を採用する。
(もっと読む)
エンドエフェクタクランプのための力及び垂直性の検出
【課題】穿孔中に締め付け力を正確に測定することができるシステムを提供すること。
【解決手段】ロボットシステム100は、電磁クランプを含むエンドエフェクタ110、クランプ114によって加工対象物表面に加えられる力を測定するためのエンドエフェクタに取り付けられた力センサー116、及び複数の垂直センサー118を備えている。垂直センサー118は、力センサー116の周囲に配置され、力センサーが加工対象物表面に接触する前に、当該表面に対してクランプが垂直かどうかを判定する。
(もっと読む)
ノズル及びその製造方法
【課題】短時間で製造可能なノズル及びその製造方法を提供することである。
【解決手段】ノズル10は、チップ部品20を吸着するための吸着面Sであって、凹曲面をなしている吸着面Sを有する。吸着面Sには、吸引孔Hが設けられている。吸着面Sを平面視したときに、吸着面Sの底部を中心とする円Bと底部を通過する2本の直線L1,L2とが交差する交差部A1〜A4が、円B上の交差部A1〜A4以外の部分に対して窪んでいる。
(もっと読む)
いくつかの構成要素を同時に操作するための装置
【課題】ピックアップし、移動して、互いに近くに配置することができ、強固で信頼性が高く構造的簡略化され、正確かつ迅速な動作を提供する。
【解決手段】閉じた位置と、互いに予め設定された距離にある少なくとも1つの間隔を置いた位置との間で移動可能である複数の握持ヘッドを有するいくつかの構成要素を同時に操作する装置であって、握持ヘッドが摺動して結合される第1のロッド形の要素と;閉じた位置に対応する第1の位置と、少なく1つの間隔を置かれた位置に対応する第2の位置との間で移動可能であり、長手方向の案内を備えた、第1のロッド形に平行な第2のロッド形の要素と;第2のロッド形の要素と一体になる支柱を有する破線を形成するジグザグにおいてヒンジ結合される複数のロッドと;ロッドが遠方端部で自由に回転させられ、第2のロッド形の要素で作動する動作手段は第2のロッド形の要素の案内で自由に摺動する複数の横の支柱と;を含む。
(もっと読む)
フィルム吸着装置
【課題】フィルムの剥がれに強く、安定した吸着ができるフィルム吸着装置の提供。
【解決手段】フィルムAを真空吸着する吸着面10aを有する第1の吸着部10と、負圧室25内部を通風する空気流れを形成する空気導入口26及び空気導出口27を有すると共に、フィルムAが剥がれた時にできる隙間を流れる空気のエジェクタ効果による負圧によって、第1の吸着部10による第1の吸着領域とは異なる第2の吸着領域におけるフィルムAを吸引する開口部22を有する第2の吸着部20と、を有するフィルム吸着装置1を採用する。
(もっと読む)
吸着装置及びロボットシステム
【課題】吸着パッドの摩耗を検出することが可能な吸着装置及びロボットシステムを提供する。
【解決手段】ロボットシステム10は、搬送物Gを吸着する吸着パッド76及び吸着パッド76の吸着圧力を検出する圧力センサ66a〜66dが設けられたエンドエフェクタ48a、48bを有するロボット20と、吸着パッド76が搬送物Gを吸着してから吸着パッド76の吸着圧力が安定するまでの間に圧力センサ66a〜66dが検出した吸着圧力の過渡データDに基づいて、吸着パッド76の摩耗を判断する判断部86を有する制御装置30とを備える。
(もっと読む)
41 - 50 / 534
[ Back to top ]