
国際特許分類[B62D137/00]の内容
国際特許分類[B62D137/00]に分類される特許
31 - 40 / 1,857
作業車
【課題】農作業等の作業性を向上させることができる作業車を実現する。
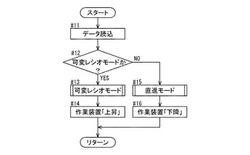
【解決手段】電動モータの回転を制御して、ステアリングハンドルの操作量に対応するステアリング装置の入力軸の操作量の比であるステアリングレシオを変更可能な可変レシオモードと、電動モータの回転を制御して、予め設定された設定位置又は設定方向に沿って走行機体を自動操向させる直進モードとを実行可能な制御装置を備えている。
(もっと読む)
電動パワーステアリング装置

【課題】簡易な構成でタイヤのグリップの喪失を検出でき、グリップロス度を位相補償し、補正操舵トルク又は補正係数を演算して電流指令値を高速に補正し、車両挙動の一層の安定化が可能な電動パワーステアリング装置を提供する。
【解決手段】モータの角速度に基づいて収れん性制御信号を出力する収れん性制御部と、車両のラック軸上に生じる外力をSAT検出値として検出するSAT検出部と、路面から生じるSATを車両モデルに基づいてSAT推定値として推定するSAT推定部と、SAT検出値及びSAT推定値に基づいてタイヤのグリップが失われた度合いを表すグリップロス度を検出するグリップロス度検出部と、グリップロス度を位相補償する位相補償部と、位相補償されたグリップロス度に基づいて補正操舵トルクを演算する補正値演算部とを具備し、補正操舵トルクと収れん性制御信号とで電流指令値を補正する。
(もっと読む)
ステアリング制御装置
【課題】車両の走行安定性を向上させることが可能なステアリング制御装置の提供。
【解決手段】位相検出部18は、操舵輪側で発生する実舵角θbがステアリングホイール側で発生する操舵角θaに対して一方の回転方向へ先行して変化する進み位相状態であるか否かを判定し、実舵角θbが進み位相状態である場合、モータベクトル制御部17は、上記一方の回転方向に対して反対方向へ向かう制動トルクを発生させる指令信号をモータ3へ出力する。
(もっと読む)
走行支援装置及び方法
【課題】運転者の意図によって1次操舵後に2次操舵を行う場合に、不要な支援を低減する技術を提供する。
【解決手段】車輌の走行可能な走路からの車輌逸脱時に、車輌を前記走路内で走行させるように警告又は補助の支援を行う走行支援装置であって、1次操舵量が前記支援を停止するか否かの閾値となる第1所定量を超えたことにより、前記支援を停止しているときに、さらに2次操舵量が前記支援の停止を延長するか否かの閾値となる第2所定量を超える場合には、前記支援の停止を延長する。
(もっと読む)
車両の挙動制御装置
【課題】自動操舵制御からドライバ操舵への切り替え時における違和感の発生を防止する。
【解決手段】ドライバの操舵から独立して車両状態量を変化させることが可能な少なくとも一つの装置を備えた車両において、車両の挙動制御装置は、前記少なくとも一つの装置のうちの少なくとも一つである対象装置を介して、前記車両状態量を目標状態量に収束させるための自動操舵制御を実行する自動操舵制御実行手段と、ハンドル角を検出するハンドル角検出手段と、前記自動操舵制御がドライバの操舵に応じたドライバ操舵へ切り替わる場合に、前記ドライバ操舵において前記ハンドル角と相関する一の前記車両状態量について、前記自動操舵制御により生じた第1状態量と、前記検出されたハンドル角に対し生じるべき第2状態量とが一致するように、前記少なくとも一つの装置を制御する状態量一致化手段とを具備する。
(もっと読む)
車両および車両制御プログラム
【課題】搭乗者の進行したい方向を正確に汲み取りながら走行予定軌道を選択して自動走行を行うことができる車両および車両制御プログラムを提供すること。
【解決手段】車両の搭乗者による回転操作によって車両の操舵方向が指示されるステアリングホイール13が設けられており、新たな走行軌道を選択して設定すべき判定エリアに車両1が位置した場合は、搭乗者によるステアリングホイール13の回転操作に基づいて、車両1が操舵され(S5)、その車両1の操舵に基づいて実際に車両1に発生したヨーレートを用いて所定時間後の車両位置を第1車両位置予測処理(S7)により予測する。これにより、車両1が走行している路面の傾きに左右されることなく、搭乗者の進行したい方向を正確に把握できる。よって、搭乗者の進行したい方向を正確に汲み取りながら走行軌道を選択して自動走行を行うことができる。
(もっと読む)
加加速度情報を用いた車両の運動制御装置および方法
【課題】非定常な車両加減速状態を含む車両のダイナミクスの変化に応じて、制御ヨーモーメント量を調整すること。
【解決手段】車両のヨーモーメントを制御する制御手段を備えた車両の運動制御装置において、車両の前後方向の速度を検出する第1の検出手段と、車両の横方向の加加速度を検出する第2の検出手段と、を有し、前記制御手段は、前記第2の検出手段により検出した車両の横方向の加加速度(Gy_dot)を、前記第1の検出手段により検出した車両の前後方向の速度(V)で除した車両のヨー角加速度(r_ref_dot)に基づいて車両のヨーモーメントの制御指令を生成し、前記制御指令を出力する車両の運動制御装置。
(もっと読む)
車両用情報処理装置
【課題】簡易な構成で現在位置よりも先の車両位置における車両の旋回曲率を推定する。また、望ましくは推定された旋回曲率を車両挙動の安定化に利用する。
【解決手段】車両(1)に搭載される車両用情報処理装置(100)は、操舵入力に対応する操舵入力情報、旋回状態を規定する車両状態量及び車速に基づいて、前記車両の将来位置を算出する将来位置算出手段と、前記算出された将来位置を少なくとも一つ含み、且つ前記車両の現在位置に対応する車両位置を含む、前記車両に係る三以上の車両位置に基づいて、前記現在位置よりも先の暫定走行位置における前記車両の旋回曲率を推定する推定手段とを具備する。
(もっと読む)
後輪トー角制御装置
【課題】左右の後輪のトー角を個々に制御する後輪トー角制御装置において、左右の後輪にコーナリングフォースの偏差が生じた場合にも車両の直進安定性を維持できるようにする。
【解決手段】後輪トー角制御装置10を、車両前後方向の加速度に基づいて左右の後輪5のトー角を共にトーイン若しくは共にトーアウトに制御するECU12と、左右の後輪5のコーナリングフォースを検出するための後輪空気圧センサ13とを備えるものとし、ECU12を、コーナリングパワー判定部26により左右の後輪5にコーナリングパワーの偏差が検出された場合、コーナリングフォース補正量算出部27により算出されたコーナリングフォース補正量(偏差)を低減するように、目標トー角補正部29により左右の後輪5のうち少なくとも一方の目標トー角θtを補正するように構成する。
(もっと読む)
車両運動制御装置及びプログラム
【課題】ドライバの視線と走行路との交点に到達するまでの時間が小さい状況における車両軌跡追従特性のダンピンの悪化を改善し、軌跡追従特性に優れた車両運動を実現する。
【解決手段】注視時間算出部30で、内向きカメラ12で撮像されたドライバの顔画像、外向きカメラ14で撮像された車両前方画像、及び車速センサ16で検出された車速Vに基づいて、注視時間Tを算出し、注視時間判定部32で、注視時間Tが予め定めた閾値Tthより小さいか否かを判定し、T<Tthの場合には、ダンピング変更部36で、ヨー角検出部34で検出された自車両のヨー角θと目標軌跡のヨー角θdとの差と、予め定めたダンピング特性とフィードバックゲインkp1との関係を示すテーブルに基づいて取得された必要なダンピング特性を得るためのkp1との積で表される偏差フィードバックδf_addを算出し、前輪舵角装置20へ出力する。
(もっと読む)
31 - 40 / 1,857
[ Back to top ]