
Fターム[2F112CA20]の内容
Fターム[2F112CA20]に分類される特許
1 - 20 / 32
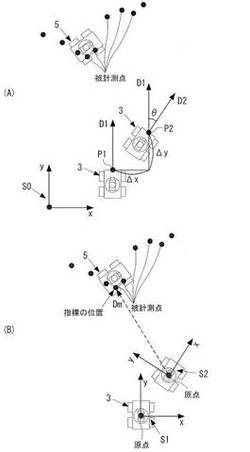
対象物との相対位置計測方法と装置
【課題】向きの変更と移動の少なくとも一方を行う動作体から、対象物との相対位置を高精度に計測できる手段を提供する。
【解決手段】動作体3に設置したレーザ距離センサにより、各被計測点の位置を動作体座標系で表わされた座標値を取得する。動作体3に設置した撮像装置により、対象物5が含まれる領域を撮像して画像を生成する。画像において、対象物5に取り付けられた指標の位置を特定し、この位置に基づいて、撮像時において対象物5の方向を特定する。距離計測時の動作体3の向きと位置に対する撮像時の動作体3の相対的な向きθと位置Δx,Δyに従って、各被計測点の座標値を、距離計測時の動作体座標系の座標値から撮像時の動作体座標系の座標値に変換する。画像内の指標の位置に対応する、変換後の座標値を特定し、この座標値に基づいて、撮像時における動作体3から対象物5までの距離を求める。
(もっと読む)
立体感提示装置および方法ならびにぼけ画像生成処理装置,方法およびプログラム

【課題】片眼でも立体感を得ることができる立体感提示装置を提供する。
【解決手段】間隔をおいて配置された2台のカメラから出力されるステレオ画像データを構成する左右の画像データに基づいて距離画像データを生成する距離画像生成手段53と,生成された距離画像データを用いて,上記の左または右の画像データに,距離に応じた焦点ぼけを与えてぼけ画像データを生成するぼけ画像生成手段55を備える。生成されたぼけ画像データに基づいて対象の焦点ぼけ画像を表示装置に表示する。
(もっと読む)
撮像装置及び眺望判定方法
【課題】 任意の被写体を含む空間の眺望の程度を判定することができる撮像装置を提供する。
【解決手段】 任意の被写体を含む空間を撮像する撮像部8と、前記任意の被写体を含む空間の基準画像を取得する基準画像取得部4と、前記撮像部により撮像された撮影画像と前記基準画像とを比較することにより前記撮影画像における前記任意の被写体の眺望の程度を判定する眺望判定部4とを備える。
(もっと読む)
3次元計測方法
【課題】ワークの3次元計測を行うために、3次元上の直線の式を算出する直線部を選択する場合に、多くの直線部を選択可能にする3次元計測方法を提供する。
【解決手段】ワークの3次元計測を行うにあたり、まず、ワークの設計データを取得する(S1)。次に、第1カメラ及び第2カメラよって、ワークを撮像し、第1画像及び第2画像を取得する(S2)。そして、取得した画像データから第1及び第2直線部を選択する(S4)。これら第1及び第2直線部を選択すると、ステレオ法を用いて第1直線部の3次元上の直線の式を算出する。次に、第1直線部の3次元上の直線の式と、ワークの設計データから求められる第1直線部に対する幾何学的な拘束条件とを用いて第2直線部の3次元上の直線の式を算出する。そして、これら第1及び第2直線部の3次元上の直線の式を用いてワークの3次元位置又は姿勢を計測する。
(もっと読む)
空中物位置測定装置、空中物位置測定システム及び空中物位置測定方法
【課題】空中に配置される雲などの測定対象物の位置を容易に正確に測定することができる空中物位置測定装置を提供する。
【解決手段】空中物位置測定装置300であって、第一地点OAにおいて全天カメラを用いて撮像された第一全天画像Z1と、第二地点OBにおいて全天カメラを用いて撮像された第二全天画像Z2とを取得する画像取得部310と、第一全天画像Z1に含まれる測定対象物の画像である第一対象物画像と、第二全天画像Z2に含まれる測定対象物の画像である第二対象物画像とが一致するように、第一全天画像Z1と第二全天画像Z2とを方位を維持しながら重ね合わせて重合画像Z3を生成する画像生成部320と、重合画像Z3内における、第一全天画像Z1の中心位置と第二全天画像Z2の中心位置と測定対象物の位置との位置関係から、空中に配置されている測定対象物の位置を算出する位置算出部330とを備える。
(もっと読む)
レーザレーダ装置及びレーザレーダ法
【課題】三次元レーザレーダ装置及び方法において、海面位置に関わらず、確実に検知対象物を検知可能とする。
【解決手段】鉛直方向に連続して配列される複数の点データからなる連続点データ群のうち高さ距離が海上に発生する波の想定最大値を上限として設定される除外閾値以下の連続点データ群に含まれる点データを除外して検知対象物の検知を行う。
(もっと読む)
ステレオカメラ校正方法及び装置
【課題】複数の単眼カメラを備え、各単眼カメラから撮像された画像の視差から物体の距離を測定するステレオカメラにおいて、ステレオカメラから校正用ターゲットまでの距離を正確に測定できるようにして、ステレオカメラの校正精度を向上せしめる。
【解決手段】2つの単眼カメラ1,2と、該単眼カメラを連結するカメラステイ3でステレオカメラを構成する。該ステレオカメラの前方に校正用ターゲット30を、後方にレーザ距離計20を設置し、カメラステイの、算出距離方向と垂直に交わる面を基準面として、レーザ距離計により、基準面までの距離L1,及び校正用ターゲットまでの距離L2を測定する。そして、基準面が、算出する距離の原点と既知の位置関係にあることを利用して、測定した距離L1,L2から、ステレオカメラから校正用ターゲットまでの距離を正確に求めて、ステレオカメラのパラメータを校正する。
(もっと読む)
接触可能性検知装置、接触可能性検知方法、及びプログラム
【課題】対象車両の自車両への接触の可能性の有無の判定精度を向上させる。
【解決手段】測距部11は、自車両と対象車両との間の距離の計測を行う。方位角変化率算出部12は、自車両に搭載されている車載カメラ2が対象車両を撮像して得た時系列の撮像画像に基づいて、当該対象車両の水平線方向の端部を当該自車両から見たときの方位角の時間変化率を算出する。そして、判定部13は、測距部11により計測された距離と、方位角変化率算出部12により算出された、前述の方位角の時間変化率とに基づいて、対象車両の自車両への接触の可能性の有無を判定する。
(もっと読む)
測距装置および電子機器
【課題】測距と同時に方向検知を可能とする測距装置を提供する。
【解決手段】測距装置は、第1の発光素子105aおよび第2の発光素子105bと、受光素子106と、演算部110とを有する。演算部110は、受光素子106の光強度分布において、強度が最も強くなる地点を最大ポイントと定義し、光強度分布の両端を第1の最端ポイントおよび第2の最端ポイントと定義したとき、最大ポイントと第1の最端ポイントとの間の距離と最大ポイントと第2の最端ポイントとの間の距離との比率に基づいて、被検出物までの距離と被検出物の移動方向とを演算する。
(もっと読む)
距離測定装置及びプロジェクタ
【課題】 正確な距離測定が可能であって測定可能な距離の範囲が広く、又機構の調整を容易に行える距離測定装置と、該距離測定装置を備えたプロジェクタを提供する。
【解決手段】 プロジェクタは、光源装置と、当該光源装置からの光を表示素子に導光する光源側光学系と、表示素子と、該表示素子から射出された画像をスクリーンに投影する投影側光学系と、距離測定装置1とを備え、光源装置や表示素子を制御するプロジェクタ制御手段を有しているものである。そして、この距離測定装置1は、レーザー光を測距対象に照射するレーザー発光器2と、測距対象からの反射光を集光する受光レンズ4と、この受光レンズ4を透過した測距対象からの反射光を受光する受光素子3と、を有し、レーザー発光器2からの射出レーザー光の光軸位置に受光レンズ4の受光領域を位置させているものである。
(もっと読む)
三次元姿勢測定装置および三次元姿勢測定方法
【課題】
輪郭が線状とならない回転体をステレオビジョンにより三次元姿勢を測定する。
【解決手段】
回転体を異なる2方向から撮像した一対の画像を取得し、前記一対の画像ごとに、測定対象である前記回転体の画像領域を抽出し、前記一対の画像ごとに、主成分分析により前記回転体の画像領域の主成分軸を算出して一の主成分軸を前記回転体の中心軸として設定し、前記一対の画像の中心軸上の点を対応付け、前記対応付けされた一対の画像から三角測量の原理により中心軸の三次元情報を求め、前記回転体の三次元姿勢を算出する。
(もっと読む)
画像センサとその画像センサに用いられる受光装置
【課題】 距離画像データと部位判別画像データの双方を取得可能な画像センサを提供すること。
【解決手段】 画像センサ100は、照射装置20と撮像装置40と演算装置60を備えている。照射装置20は、第1波長光を照射する第1光源22と、第2波長光を照射する第2光源を有する。演算装置60は、少なくとも第1波長光が照射装置20から対象物で反射して撮像装置40に到達するまでの距離に基づいて距離画像データを演算する。演算装置60はさらに、対象物における第1波長光の第1反射光の反射特性と対象物における第2波長光の第2反射光の反射特性の差に基づいて部位判別画像データを演算する。
(もっと読む)
撮像装置及びその制御方法
【課題】撮像対象との距離を表す距離画像を生成する際に、撮像対象の光反射やその光沢などの外乱、測定原理等に起因する距離の誤差の低減を実現する。
【解決手段】撮像対象との距離を計測するための画像を撮像する第1の撮像手段110と、第1の撮像手段110で撮像された画像に基づくデータを用いて撮像対象までの距離を算出する距離算出手段130と、偏光成分を計測するための画像を撮像する第2の撮像手段122と、第2の撮像手段122で撮像された画像に基づくデータを用いて偏光状態の解析処理を行う偏光解析手段140と、距離算出手段130で算出された距離に係る距離情報103及び偏光解析手段140で解析処理された偏光状態に係る偏光解析情報105に基づいて、撮像対象の距離画像106を生成する距離画像生成手段150を備える。
(もっと読む)
マシンビジョンを用いたオブジェクトの3次元アライメントのためのシステムと方法
本発明はモデル化されたオブジェクトまたはシーンの3次元アライメントを決定するためのシステムおよび方法を提供する。校正後、3D(ステレオ)センサスシステムはオブジェクトを観測して、当該オブジェクトを包含するシーンの実行時3D表現を導出する。各ステレオヘッドからの修正画像は、それらのエッジ特徴を強調するために前処理される。次に少なくとも2個(1対)の前処理された修正画像で、所定の特徴を最初の画像上に特定し、次いで同じ特徴を別の画像中に特定することによりステレオマッチングプロセスが同時に実行される。各対のカメラについて3Dポイントが計算されて3Dポイントクラウドが導出される。3Dポイントクラウドは各カメラ対の3Dポイントをワールド校正からワールド3D空間に変換することによって生成される。ポイントクラウドからの3Dデータの量は、より高水準の幾何学形状(HLGS)、たとえば線分を抽出することによって削減される。実行時に検出されたHLGSがモデルのHLGSに対応させられて、候補3D姿勢を生み出す。粗い採点で姿勢の数を減らす。さらに残った候補姿勢は一層精緻なプロセスに入れられる。次にこれらの残った候補姿勢は、たとえば候補姿勢の検出された3Dまたは2Dポイントをより大きいセットの対応する3次元または2次元モデルポイントに適合させることによって検証され、その場合に最も近いマッチが最良の精緻な3次元姿勢である。  (もっと読む)
(もっと読む)
監視装置
【課題】測距装置を併設することなく、監視を続けながら測距を行うことの可能な監視装置を提供することを目的とする。
【解決手段】送光部11から射出されたレーザ光が物体に到達し、物体により反射された反射光が到達するタイミングに合わせてシャッタを開閉させる監視制御を行うとともに、該監視制御を行っている期間中に、物体の距離情報を取得するタイミングでシャッタを開閉させる測距制御を行う監視装置を提供する。
(もっと読む)
光学式変位計
【課題】簡易な構成において、対象物表面上の複数箇所の距離や変位を計測する。
【解決手段】レーザ光源14から出射されたレーザ光は、スプリッタ15で向きの異なる二つの光線に分岐され、対象物2の表面上の異なる二つの位置にそれぞれ光スポットを形成する。測定処理部16は、一次元撮像カメラ17のリニアイメージセンサ19の光検出パターンより二つの光スポットの、一次元撮像カメラ17に対する方向を算定し、算定した二つの光スポットの一次元撮像カメラ17に対する方向と、スプリッタ15からの二つの光線の出射方向と、スプリッタ15の位置と、一次元撮像カメラ17の位置とにより、対象物2の表面上の二つの光スポットの位置各々の二次元座標を、三角測量によって算定する。
(もっと読む)
撮像装置
【課題】撮像装置の温度が変化した際に基線長が変化し正確な測距が難しくなる。この基線長の変化量は、量産した場合、個体の実装状態によって度合がばらつくため、高精度な測距温度補正が困難という課題があった。
【解決手段】複数のレンズを一体化したレンズアレイと、前記レンズアレイの各レンズに1対1に対応する複数の撮像領域と、前記レンズアレイを保持する筐体とを備え、前記レンズアレイは、前記筐体に対し、所定の一点で固定されている。また、前記レンズアレイは、前記筐体に対し、前記所定の一点を中心にして熱膨張による変形可能に保持されている。
(もっと読む)
人体検知装置及び水回り機器
【課題】人体検知装置の検知特性の経時的な変動を補正する機能を有した人体検知装置を提供する。
【解決手段】比較回路21は、コントローラ2からの入力電圧が制御回路本体部22から与えられる基準電圧よりも高くなると、人体検知信号を出力する。この人体検知信号が制御回路本体部22に入力されると、便蓋を開とする。人体が検知されなくなると、便蓋を閉とすると共に弁を所定時間開弁させ、便器洗浄を行う。次いで、経年指数を演算する。この経年指数は、上記積算動作回数に一定の係数を乗じた値と、この便器設備の製作後の経過時間との和である。この経年指数に基づいて比較回路21に与える基準電圧を調整する。
(もっと読む)
光学式測距センサおよび温水洗浄便座
【課題】簡単な構成で広い測距範囲において測距対象物までの距離に比例する出力を正確に得ることができ、広い測距範囲全域で測距精度を均一にできる光学式測距センサを提供する。
【解決手段】発光素子502と、発光素子502から出射された光を集光して、測距対象物に照射するための投光用集光部508と、測距対象物からの反射光を集光する受光用集光部509と、発光素子502から出射された光の光軸に対して受光面を含む平面が垂直になるように配置され、受光用集光部509により集光された反射光を受光する位置検出受光素子503と、位置検出受光素子から出力される信号の処理および発光素子502を所定のタイミングで駆動するIC504とを備える。上記位置検出受光素子503の受光部は、発光素子502と位置検出受光素子503を結ぶ基線に沿って並んだ複数の受光領域に分割され、分割された複数の受光領域の抵抗値が異なる。
(もっと読む)
投射装置、投射装置の測距方法およびプログラム
【課題】空間的光変調素子を用いた投射装置の場合でも、安定した積分センサ出力信号を得られ、これを用いて、精度の高いフォーカス制御や歪み補正制御を行えるようにする。
【解決手段】センサ制御部42で、カラーホイールマーカ信号S7およびカラーホイールセグメント信号S8から、カラーホイール45の回転に同期したセンサ積分制御信号S1,S3を生成し、位相差センサ131、132で、カラーホイールの回転に同期したセンサ積分制御信号S1,S3によりセンサ出力信号を積分し、コントローラ部39で、一対のフォトセンサアレイの位相によりスクリーン上の測距点までの距離を算出して、フォーカス制御や歪み補正制御を行う。センサ積分制御信号をカラーホイールの回転に同期させると、積分されたセンサ出力信号のバラツキがなくなる。
(もっと読む)
1 - 20 / 32
[ Back to top ]