
Fターム[3C007LS20]の内容
マニピュレータ、ロボット (46,145) | 教示(プログラム作成) (978) | シミュレーション (134)
Fターム[3C007LS20]に分類される特許
1 - 20 / 134
ロボット監視システム、及びロボット監視システムの異常判定方法
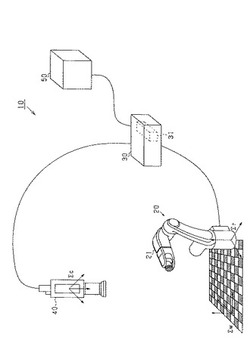
【課題】ロボットの移動先の異物等をリアルタイムで監視することのできるロボット監視システム、及びロボット監視システムの異常判定方法を提供する。
【解決手段】ロボットコントローラ30は、予め正常状態でアーム21を動作させた際に、カメラユニット40により取得された撮像画像と、算出された撮像時のアーム21の姿勢とを対応付けてデータ記憶部31に保存しておく。シミュレータ50は、アーム21が動作する際の各姿勢について、その姿勢から所定周期経過するまでにアーム21が動作する動作範囲を算出する。ロボットコントローラ30は、アーム21の動作を制御する際に、算出されるアーム21の姿勢に対応する正常状態の撮像画像をデータ憶部31から読み込み、カメラユニット40により取得される撮像画像と正常状態の撮像画像とにおいて、動作範囲に対応する部分を比較して異常の有無を判定する。
(もっと読む)
ロボット制御装置、ロボット制御方法、およびプログラム

【課題】曖昧な命令をロボットに入力しても、ロボットに動作を行わせることができず汎用性のあるロボット制御装置、ロボット制御方法、およびプログラムを提供すること。
【解決手段】シナリオとサブシナリオとが対応付けられて登録されているデータベース103と、入力装置62から入力された命令を取得する命令取得部101と、命令取得部が取得した命令に対応するサブシナリオをデータベースから読み出して、サブシナリオに基づいてロボット1を制御する制御コマンドを生成する制御コマンド生成部104とを備え、制御コマンド生成部は、命令取得部が取得した命令を実行するのに必要な要素に未取得の要素がある場合、ロボットに未取得の要素を取得させる命令を抽出してロボットに送信し、ロボットが取得した要素をサブシナリオに組み込んでロボットを制御する制御コマンドを生成する。
(もっと読む)
干渉チェック装置及びプログラム
【課題】ワークとロボットからなる複数の可動物体間の干渉をチェックして、干渉が発生する動作プログラムを自動で修正する。
【解決手段】取得手段21Aが、複数の可動物体の形状データ及び動作プログラムを取得する。モデル作成手段21Bが、形状データに基づいて、複数の可動物体モデルを作成する。シミュレーション手段21が、動作プログラムと可動物体モデルに基づいて、複数の可動物体モデルの動作をシミュレーションする。干渉判定手段22が、シミュレーション結果に基づいて、複数の可動物体モデル間の干渉の有無を判定する。回避動作設定手段25Aが、干渉する可動物体モデルの動作プログラムに干渉の回避動作を設定する。動作プログラム検証手段25Bが、回避動作を設定した動作プログラムの干渉の有無を判定させる。
(もっと読む)
動作制御方法、ロボット及びプログラム
【課題】動作制御方法、ロボット及びプログラムにおいて、比較的簡単な制御でロボット又はアニメーションキャラクタに円滑な動作、例えば人間からみて違和感のない自然な動作を行わせることを可能にすることを目的とする。
【解決手段】複数の可動部を有するロボット又はアニメーションキャラクタの動作が、動かす動作可動部で時系列に定義された動作パターンを、可動部間の動きの影響に応じて可動部同士をリンクで結んだグラフに基づいて更新し、更新された動作パターンに基づいて複数の可動部を制御し、前記更新は、グラフに基づいて動作可動部に加え、動作可動部に影響されて動作する従属可動部の動作を自動的に生成するように構成する。
(もっと読む)
ロボットシミュレーション装置、ロボットシミュレーション方法、及びロボットシミュレーションプログラム
【課題】シミュレーションを行うハードウェア資源によってシミュレーションの結果が互いに異なることを抑えてハードウェア資源間でのシミュレーションの結果の差異を少なくすることの可能なロボットシミュレーション装置、ロボットシミュレーション方法、及びロボットシミュレーションプログラムを提供する。
【解決手段】仮想ロボットを軌道に沿って動かすロボットシミュレーション装置であって、前記仮想ロボットの軌道をサンプリング時間Tpだけサンプリングするプロセスである軌道計算プロセスP1を割り込み間隔Tiで行う軌道計算部と、前記サンプリング時間Tpが前記割り込み間隔Ti以下となる範囲で前記サンプリング時間Tpと前記割り込み間隔Tiとの双方を各別に可変にする時間可変部とを備える。
(もっと読む)
ロボットアーム及びロボットアームの制御方法
【課題】ロボットアームの軌道に障害物がある場合でも、迅速に障害物を退避し、タスクを効率よく実行する。
【解決手段】ハンド部5と、複数の関節11,12,13と、ハンド部5及び関節11,12,13とを連結する複数の連結部14,15,16,17とを有するロボットアーム1であって、ハンド部5が物体を把持して移動する工程と、関節13に備えられたひじあて部6が障害物を押圧する工程と、を有する。
(もっと読む)
干渉検出方法及び干渉検出装置
【課題】2台のロボットが作業する際に、ロボット同士の干渉の有無を短時間で検出することを可能にするロボットの干渉検出方法及び干渉検出装置を提供すること。
【解決手段】第1多関節ロボット50a及び第2多関節ロボット50bの作業時におけるサンプリング時間ごとの姿勢を求め、第1多関節ロボット50aの各姿勢と第2多関節ロボット50bの各姿勢とを総当たりに比較し、第1多関節ロボット50a及び第2多関節ロボット50aの姿勢の干渉の有無を検出する干渉検出装置10において、基準サンプリング時間taよりも長く設定した区切り時間tbごとに、作業時における第1多関節ロボット50a及び第2多関節ロボット50bの距離を求め、区切り時間tbのそれぞれの中で用いるサンプリング時間を当該距離に応じて基準サンプリング時間taより長く設定する第1サンプリング時間設定部88を備える。
(もっと読む)
シミュレーションシステムおよびそのためのシミュレーションプログラム
【課題】本発明は、作業ロボットが行う作業に求められる作業精度を満たす精度で、取得した画像データから作業対象物の3次元位置・姿勢認識を行い、作業ロボットが当該作業を適切に行うようシミュレーションすることが可能なシミュレーションシステムおよびそのためのシミュレーションプログラムの提供を目的とする。
【解決手段】本発明にかかるシミュレーションシステムは、撮像部20、特に第2撮像部22の倍率設定、フォーカス設定等の撮像パラメータを制御し、作業に要求される作業精度を満たす解像度で画像データを取得することにより、作業対象物10自体の大きさや、作業対象物10と撮像部20との距離に影響されて解像度が低下することを防ぎ、作業対象物10に対する必要な3次元位置・姿勢認識精度を維持することができるので、シミュレーションおよび現実の作業において作業効率の低下や、作業の失敗確率の増大を招くことを抑制できる。
(もっと読む)
多関節ロボットアーム型搬送装置の軌道情報生成装置
【課題】始点から終点までの搬送対象物を直線移動させるにあたり、移動時間の短縮と振動の低減とを両立した軌道情報生成装置を提供する。
【解決手段】多関節ロボットで搬送対象物を直線移動させるにあたり、搬送装置103の動力学モデルに基づいて始点Sから終点Eまでの移動に要する時間teをパラメータの一つとして含む評価関数の値が最小となるように最適化手法を用いて軌道情報132を生成する。動力学モデルとして搬送対象物Wを搬送する先端リンクの動作を直線動作に限定したモデルを予め設定しておき、予め設定された搬送装置の振動特性を用いて先端リンクの移動により生じる模擬振動の大きさ(x−xa)を算出し、算出した模擬振動の大きさ(x−xa)をパラメータの一つとして評価関数に含め、少なくとも上記2つのパラメータである移動時間te及び模擬振動の大きさ(x−xa)を含む評価関数の値が最小となるように軌道情報132を生成する。
(もっと読む)
ロボットシステムまたはロボット制御装置
【課題】冗長な自由度を有するマニピュレータをより最適に制御することができるようにしたロボットシステム及びロボット制御装置を提供する。
【解決手段】1以上のアクチュエータを有するマニピュレータ2とこれを制御するコントローラ3とを有し、コントローラ3は、アクチュエータの内の一部を冗長軸と設定し、マニピュレータの目標位置姿勢を設定し、マニピュレータが現在の姿勢から目標位置姿勢に達するまでの動作軌跡を生成し、マニピュレータの到達可能範囲内の領域を分割して設定した小領域と各小領域に対応する冗長軸角度用パラメータとを対応付けた冗長角度定義テーブル7を有し、冗長角度定義テーブル中の該当する小領域を選択し、選択結果に基づいて冗長軸角度を設定し、動作軌跡と冗長軸角度とに基づいて動作指令を生成する。
(もっと読む)
オフラインティーチング方法
【課題】溶接システムにおけるオフラインティーチングを、操作の熟練を要することなく、高精度で、実施することができるオフラインティーチング方法を提供する。
【解決手段】
溶接線方向をY方向、被溶接材1の面に垂直の方向をZ方向、Y方向及びZ方向に垂直の方向をX方向とする3次元直交座標系を設定する。そして、前回のステップから現ステップを向く前段座標系として、XAYAZAの座標系Aを設定し、現ステップから次順のステップを向く後段座標系として、XBYBZBの座標系Bを設定する。よって、前回のステップから現ステップまでの溶接線セグメントはYA方向となり、現ステップから次順のステップまでの溶接線セグメントはYB方向となる。このワークを基準とする座標係で溶接線を規定し、オペレータがこのワーク座標上で、トーチ移動量を指定する。
(もっと読む)
シミュレーション装置
【課題】被制御装置の模擬が実行可能になるまでに要する時間が短く、且つ、被制御装置を正確に模擬することができるシミュレーション装置を提供する。
【解決手段】シミュレーション装置20は、制御装置10の制御対象である被制御装置を模擬するものであって、被制御装置を構成する機器毎の特性を示す情報が格納された設定ファイルの内容に基づいて、被制御装置を構成する機器のうち応答速度が予め設定された基準速度よりも速い機器を模擬するシミュレーションPLC21と、上記の設定ファイルの内容に基づいて、被制御装置を構成する機器のうち応答速度が基準速度よりも遅い機器を模擬するシミュレーションPC22とを備える。
(もっと読む)
プログラム作成装置及びプログラム作成方法
【課題】作業ブロックの設定作業において作業者の負担を軽減する技術を提供する。
【解決手段】プログラム作成装置は、作業ブロック定義部41と、工程フロー編集部42と、制御プログラム生成部43とを備える。工程フロー編集部42は、複数の作業ブロック情報を所望の順序で並べて得られる工程フローにおいて、処理対象作業ブロック情報よりも後続の設定対象ブロック情報の内部状態情報を、当該処理対象ブロック情報の事後条件を用いて設定する。制御プログラム生成部43は、工程フロー編集部43により内部状態情報が設定された複数の作業ブロック情報に基づいて制御プログラムを生成する。
(もっと読む)
ロボット用事故解析システム
【課題】ロボットに発生した事故状態を客観的にとらえることができるロボット用事故解析システムを提供する。
【解決手段】ロボット2に発生した事故状態を再現するロボット用事故解析システムであって、ロボット2に設けられ、自ロボットの稼動状態情報を認識する稼動情報認識部と、ロボットとは別に設けられた撮像手段6によって撮像されたロボット2とその周辺環境との画像データを環境情報として認識する環境情報認識部とを有し、前記稼動状態情報と前記環境情報とを記録するロボット用レコーダ装置3と、ロボット用レコーダ装置3に記録された稼動状態情報及び環境情報に基づいて事故状態を再現するロボット用シミュレータ装置4とを備える。
(もっと読む)
情報処理装置および情報処理装置の制御方法
【課題】 操作者の負担を軽減させつつ、複雑なロボットシステムの構成部材を適切に配置すること
【解決手段】 撮像手段を有し、当該撮像手段の撮像画像に基づき作業を行うロボットシステムの構成部材の配置を設定するための情報処理装置であって、
前記ロボットシステムの作業空間に対応する仮想空間に、前記構成部材に対応する仮想物体を配置する配置手段と、前記撮像画像に対応する、前記仮想物体が配置された前記仮想空間の仮想空間画像を取得する第一の取得手段と、前記仮想空間画像に基づき、前記ロボットシステムの作業に対する前記仮想物体の配置の適合を示す評価値を取得する第二の取得手段とを有することを特徴とする。
(もっと読む)
動作支援システム
【課題】装着型動作支援装置に対するユーザの不安感を軽減する。
【解決手段】動作支援システム100は、ユーザの関節にトルクを与えてユーザの動作を補助する脚装具12と、脚装具12の動作を規定するパラメータを指定するための入力デバイス50と、入力されたパラメータに基づく装着型動作支援装置の動作を表すシミュレーション画像を表示する表示デバイス50を備える。動作支援システム100は、脚装具12を実際に動作させるのに先立って、その動作のシミュレーション画像をユーザに提供することができる。ユーザは、脚装具12を実際に動かす前に、その動きを画像によって知ることができる。
(もっと読む)
ロボット制御装置
【課題】認識対象物の3次元認識の結果に基づいて、自動的に認識対象物に対してロボットのハンドによる作業を行わせるためのロボット制御装置を提供する。
【解決手段】 認識対象物5及びハンド3の形状をシミュレーション手段10へ入力して、認識対象物5を把持する際のモデル座標系におけるハンド3及び認識対象物5を離す際のロボットベース座標系における認識対象物5の位置・姿勢を定義し、センサ座標系における認識対象物5の位置・姿勢を求め、これらの情報に基づいて、ハンドが認識対象物5を把持する際のロボットベース座標におけるハンド3の位置・姿勢及び認識対象物5を離す際のロボットベース座標系におけるハンド3の位置・姿勢を求め、この求めたハンド3の位置・姿勢を引数として与えた制御プログラムをロボット2に出力することにより、ロボット2を制御して認識対象物5に対してハンド3による作業を行わせる。
(もっと読む)
ロボットの動作軌跡表示装置
【課題】作業者がロボットの手先の動作軌跡を把握できながら、ロボットの手先の動作軌跡がロボットの動作を妨げ得る物体表面に接近する箇所を把握できるようにする。
【解決手段】ロボットの手先の動作軌跡24については、従来から何ら変更することなく従来通りの表示態様で表示する一方で、物体表面図形22、23については、ロボットの手先の動作軌跡24から一定距離以下である接近点が存在すると、接近点が含まれる領域である接近領域31、32を接近点が含まれない領域と区分して表示する。
(もっと読む)
ロボットシミュレータ
【課題】ロボットとワークとの位置関係に変化が生じることを前提に、位置関係に変化が生じてもロボットの姿勢が動作可能な領域であるか否かを簡単な処理で判定する。
【解決手段】設置位置判定部67は、ワークに想定される誤差Δpに対応するエンドエフェクタの位置変化量Δrから、線形に近似された演算式を用いてマニピュレータの姿勢変化量Δqiを算出している。すなわち、設置位置判定部67は、演算部52にとって処理が容易な線形式を利用してロボットが作業可能な範囲であるか否かを判定する。
(もっと読む)
ロボットの姿勢判定方法
【課題】簡易な演算により、ロボットの姿勢を判定するロボットの姿勢判定方法を提供する。
【解決手段】ワークに想定される誤差Δpにともなうエンドエフェクタの位置の変化を位置変化量Δr、誤差Δpにともなうマニピュレータにおける各軸の変化量を姿勢変化量Δq、誤差Δpが存在しないときのマニピュレータの各軸の値をqiとし、このqiにおけるヤコビアンをJv(qi)とすると、姿勢変化量Δqを、Δqi=Jv(qi)-1Δrにより算出する。そして、誤差Δpが最大となるときのマニピュレータの各軸の変化量を変化量Δqimaxとし、関節の回転角度限界をqmaxとすると、qi+Δqimax≦qmaxを満たすマニピュレータの各軸の値qiを誤差Δpを有するワークに対し当該作業点iにおける作業が可能な姿勢であると判定する。
(もっと読む)
1 - 20 / 134
[ Back to top ]