
Fターム[3C269QE11]の内容
数値制御 (19,287) | 表示内容、監視、記録内容 (1,309) | 文字、数字、記号を用いて表示するもの (384)
Fターム[3C269QE11]の下位に属するFターム
各種名称を表示 (110)
寸法、座標値を表示 (109)
プログラム内容を表示 (73)
Fターム[3C269QE11]に分類される特許
21 - 40 / 92
アーク溶接ロボット制御装置
【課題】
アーク溶接ロボットにおいてトーチ姿勢の教示が煩雑である。
【解決手段】
ロボット制御装置RCは、トーチTの姿勢を規定するトーチ姿勢ファイルを作成するCPUと記憶部を備える。トーチ姿勢ファイルは、溶接線上の教示点または溶接開始命令の1パラメータとして設定される。ロボット制御装置RCは、作業プログラムを再生する際、トーチ姿勢ファイルが設定された教示点、またはトーチ姿勢ファイルが設定された溶接開始命令が有効となる教示点におけるトーチ姿勢を算出する。角度パラメータを、作業プログラムとは別のファイルとすることで、一度教示したトーチ姿勢の再利用を可能とすると共に修正も容易となる。
(もっと読む)
工作機械

【課題】たとえ経験の浅い作業者等であっても、びびり振動を抑制しやすく、ひいては歩留まりの向上等を図ることができる工作機械を提供する。
【解決手段】びびり振動が発生した際に所定のパラメータを変更することで、変更後のパラメータの値に応じた振幅Q及び周期Rで主軸2の回転速度を変動させるものにおいて、そのパラメータに係る情報をパラメータ表示制御部11が表示手段9へ表示する。したがって、作業者は表示手段9における表示を参考にしてパラメータを変更し、主軸2の回転速度の振幅Q及び周期Rを変更することができる。そのため、経験の浅い作業者であっても、従来より容易にびびり振動を抑制させることができ、ひいては歩留まりの向上も図ることができる。
(もっと読む)
ロボット制御装置
【課題】
手動操作座標系を自動的に切り換えても、手動操作座標系が切り換わったことを作業者が本当に認識しない限り、意図しない方向へロボットを手動操作により移動させてしまう可能性がある。
【解決手段】
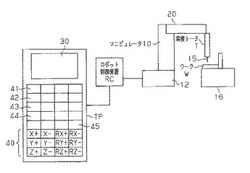
ロボット制御装置RCは、複数のユーザ座標系を表示装置30に表示させることにより、表示された複数のユーザ座標系の中からいずれか1のユーザ座標系の選択を促すCPUを備える。CPUは、自動選択された座標系をティーチペンダントTPの表示装置30に表示するようにする。さらに、手動により選択された座標系と、自動選択された座標系とが一致した場合のみ、手動操作座標系の切り替え制御を行う。自動選択された座標系と作業者が意図している座標系とが相違することがなく、安全性を高めることができる。
(もっと読む)
工作機械における主軸回転速度のモニタ方法及びモニタ装置、工作機械
【課題】主軸の回転速度を変動させるための設定値が容易に選択でき、びびり振動の抑制に最適な加工条件を見出すことができるようにする。
【解決手段】モニタ装置において、変動値設定部のモニタに、回転速度の変動振幅と変動周期との関係を示すグラフを表示し、そのグラフに現在の変動位置(第1点)を黒丸のマーカーで表示すると共に、所定の式に基づいてモータの変動周期の電力限界線Lを作成してグラフ上に表示して、電力限界線L以下の範囲内で、現在の変動位置よりも変動振幅が大きく、且つ変動周期が短くなる新たな変動位置を算出して、新たな変動位置(第2点)を、現在の変動位置からの変更を案内する矢印Aと共にグラフに表示する。
(もっと読む)
工作機械のモニタ方法及びモニタ装置、工作機械
【課題】強制びびり振動と再生型びびり振動とを区別してびびり振動の発生状況をオペレータに通知することにより、効果的にびびり振動を抑制できる加工条件を選択することができるようにする。
【解決手段】立形マシニングセンタのモニタ装置は、加工が開始されると、主軸の回転速度とびびり振動の発生とを検出すると共に、検出されたびびり振動の種類を判定し、判定されたびびり振動に係る振動情報と検出された回転速度とに基づいて、グラフ18を作成してモニタ17に表示する。このグラフ18は、横軸が主軸回転速度、縦軸が加速度となって、発生したびびり振動の加速度を主軸回転速度に応じてマーカー19,19・・で表示すると共に、再生型びびりを三角形、強制びびりを四角形として区別している。また、各マーカー19にはびびり振動の種類に応じた色分けもなされている。
(もっと読む)
干渉判定装置および干渉判定方法
【課題】干渉のない立体交差を考慮しつつも、干渉判定を短時間で行う。
【解決手段】
識別番号を割り当てる識別番号割当部421と、干渉情報を格納する干渉情報格納部412と、干渉条件情報を格納する干渉条件情報格納部413と、3次元空間を2次元平面上に投影し、2次元平面をn1×n2のマス目に区切るマス目管理部424と、障害物対応マス目を特定し障害物占有情報で初期化するメモリ領域初期化部425と、ロボット対応マス目を特定しロボット占有情報を記録する占有情報記録部426と、ロボット占有情報と干渉条件情報間の論理積を求め、論理積の全ての桁が「0」なら「干渉無し」と、少なくとも一つの桁が「1」なら「干渉有り」と判断する判断部427を備える。ロボット対応マス目のメモリ領域に障害物占有情報が記録されている場合に、障害物占有情報と識別番号間の論理和がロボット占有情報となる。
(もっと読む)
プログラム作成支援システム、及び、そのコンピュータプログラム
【課題】複数の駆動手段によって駆動されるロボット装置用の駆動プログラムの作成を容易にすることができるプログラム作成支援システムを提供する。
【解決手段】プログラム作成支援システム1は、各サーボ5の接続構成を設定するための設定画面SGを表示する表示装置4と、所定の情報を記憶する制御ユニット3と、を備えている。そして、プログラム作成支援システム1は、仮想3次元空間に配置するための各サーボ5にそれぞれ対応するオブジェクトSOを生成し、設定画面SGにて設定された接続構成となるように各オブジェクトSOを配置した仮想3次元空間に基づいて2次元画像を生成し、当該2次元画像を前記設定画面SG上に表示させるものである。更に、設定画面SGに含まれる動作設定領域DSにて接続構成が設定された各サーボ5のそれぞれの動作に対応する駆動信号を生成し、各サーボ5に出力するものである。
(もっと読む)
加工シミュレーション装置及び方法
【課題】切削加工シミュレーションにおいて、加工傷の発生状況とその発生メカニズムとに関する定量的な分析を支援する各種の特性量をより直感的に把握できる加工シミュレーション装置及び方法を得ること。
【解決手段】工具の種別及び形状を示す工具データ6及び工具の移動軌跡を示す工具移動軌跡データ7に基づいて切削加工をシミュレートして被加工物の形状を示す被加工物形状データ8を生成する切削形状処理部2と、切削加工の過程における被加工物の加工面上の着目点について、着目点の創成に関与した特性量を、被加工物形状データ8、工具データ6及び工具移動軌跡データ7に基づいて算出する工具移動特性量算出部4と、被加工物形状データ8に基づいて生成された、予め定められた視線方向に沿った被加工物の投影イメージに、特性量を重畳してディスプレイデバイス9に表示させる切削形状表示部3とを有する。
(もっと読む)
工具配置算出装置、工具配置算出プログラムおよび記憶媒体
【課題】工具マガジンの切替回数が最小となる工具配置を確実に算出できる工具配置算出装置、工具配置算出装置の制御プログラムおよび記憶媒体を提供する。
【解決手段】数値制御装置のCPUは、NCプログラムから工具交換指令を読み込み、工具Tの使用順番Lを記憶する(S11、S12)。使用順番Lにおいて、NCプログラムの工具の使用順で単発工具が連続する単発工具連続箇所Miを記憶する(S15)。単発工具連続箇所Miを1本の工具とみなし、順列Wの全ての組合せを生成する(S17)。各順列Wを工具配置Qに変換し、切替回数Rを算出する(S18,S19)。それ故、切替回数Rの計算に係る処理量は格段に減少するので、切替回数Rの最も少ない最適工具配置を確実に算出できる。
(もっと読む)
数値制御装置
【課題】工作機械における駆動関連要素の電力損失または電力効率を算出し表示、印刷出力、記憶媒体への記録出力、または、数値制御装置内部または外部の機器への出力を実施することが可能な数値制御装置を得ること。
【解決手段】モータなどのアクチュエータを駆動させるための電力供給に関係する工作機械6における各駆動関連要素、および工作機械6に電力を供給する電源装置12のうちの少なくとも2つ装置の出力電力または出力エネルギーを計算または推定する電力算出部3と、前記電力算出部3から出力された出力電力または出力エネルギーから電力損失または電力効率を算出する損失/効率算出部4と、前記損失/効率算出部4にて算出された電力損失または電力効率を表示、印刷出力、記憶媒体への記録出力、または他の機器への出力を実施する電力出力部5とを備える。
(もっと読む)
振動抑制装置
【課題】現在の閾値がどのような値として設定されているかを作業者が容易に把握することができる振動抑制装置を提供する。
【解決手段】実加工前の最大加速度に基づいて閾値を新たに変更設定するとともに、元の閾値や変更後の閾値をフーリエ解析の解析結果に関連づけて表示装置に表示するようにした。したがって、作業者は実加工時に閾値がどのように設定されているかを容易に把握することができる。また、「びびり振動」の発生を示す最大加速度が検出されたにも拘わらず、閾値が高く変更設定されすぎて検出できないような事態を容易に見つけ出すことができる。
(もっと読む)
アークセンサにおける狙い位置修正方法及びロボット制御システム
【課題】
狙い位置を手動により調整する機能を複数パスの連続溶接に適用することができるアークセンサにおける狙い位置修正方法及びロボット制御システムを提供する。
【解決手段】
先に行われる教示パスにおいて、ティーチペンダント40又は手動狙い調整器70により狙い位置の調整が行われた場合、その調整結果を後の教示パスで利用するか否かをティーチペンダント40により設定する。調整結果を利用すると設定された場合、後に行われる教示パスではCPU22は調整結果に基づいて内部オフセット値を更新すると印加電圧及び更新後の内部オフセット値に基づいてマニピュレータ10を移動制御する。調整結果を利用しないと設定された場合、後に行われる教示パスではCPU22はアークセンサユニット50が検出した印加電圧に基づいて、マニピュレータ10を移動制御する。
(もっと読む)
数値制御装置
【課題】メンテナンス通知が発生しても、工作機械操作者が工作機械を停止することがなく、生産性を高めることができる数値制御装置を提供すること。
【解決手段】CPU2は、現在の時間と、現在のアラーム番号と対応付けてRAM4に記憶された表示時間とを比較する(S30)。現在の時間が、表示時間の範囲外の場合、CPU2は、表示許可時間帯ではないと判断し(S30:NO)、アラームを表示するステップS40を省略する。
(もっと読む)
ロボットシステム
【課題】有線型の教示装置を引き続き使用しつつ無線通信機能を実現して導入コストを抑制できるとともに、ケーブルの取り回しの煩雑さを解消し、なおかつ作業者に無線化に伴う負担を強いることがないロボットシステムを提供する。
【解決手段】
ロボット1と、ロボット1の教示や操作に用いる教示装置3と、ロボット1および教示装置3と接続されてロボット1を制御するロボット制御装置2とを備え、教示装置3は、教示装置3とは別体であって、ケーブル41を通じて教示装置3に接続される無線化装置4を介してロボット制御装置2との間で無線通信を行う。
(もっと読む)
工作機械の制御装置
【課題】象限突起補正等に関するNCパラメータの調整を容易に行うことができる工作機械の制御装置を提供する。
【解決手段】複数のNCパラメータの調整レベルをそれぞれスライド式又はロータリ式の調整手段3で変えることができる入力部と、NCパラメータを変更することによって変化する機械の状態を図形で表した図形データを記憶するとともに、入力部で入力したNCパラメータの調整レベルに対応した図形データを生成する図形データ生成部7と、生成された図形データに基づいて図形を画面に表示する表示部4と、を具備する。
(もっと読む)
制御パラメータ調整方法及び調整装置
【課題】移動機構(送り機構など)が経年変化したとき、制御パラメータを適正な値に自動調整する制御パラメータ調整方法及び調整装置を提供する。
【解決手段】調整用NCプログラムを数値制御装置へ通知して登録する第1の処理(ステップS1)と、数値制御装置が調整用NCプログラムを実行することにより調整用の位置指令を出力する第2の処理(ステップS2)と、前記位置指令と、フィードバックされる移動体の位置との差の最大値である最大誤差を求める第3の処理(ステップS3〜S6)と、最大誤差が許容誤差δAw以下か否かを判定し、最大誤差が許容誤差よりも大きいと判定したとき、加減速時定数を大きな値に変更し、この変更後の加減速時定数を数値制御装置へ出力する第4の処理(ステップS7〜S9)とを実施し、且つ、前記第4の処理において、最大誤差が許容誤差以下であると判定するまで、第2〜第4の処理を繰り返す(ステップS2〜S9)。
(もっと読む)
ロボットの教示装置、およびロボットの制御装置
【課題】ロボットのハンドツールに作用する力とモーメントとが略ゼロである、ハンドツールによって部品を把持してワークに組付ける動作をロボットに短時間で教示する。
【解決手段】ハンドツールを備えたロボットに動作を教示する教示装置であって、部品組付け方向と直交する方向にハンドツールを平行移動させて該ハンドツールの位置を調整する平行移動操作手段60a〜62bと、ハンドツールを組付け方向と直交する方向に延びる回転中心線を中心として回転させて該ハンドツールの姿勢を調整する回転操作手段64a〜66bと、ハンドツールに作用する力とモーメントを検出する力覚センサと、ハンドツールに作用する力とモーメントとが略ゼロの該ハンドツールの位置と姿勢とを作業者が特定するときにすべき平行移動操作手段と回転操作手段に対する操作の情報を、力覚センサの検出結果とハンドツールの位置と姿勢とに基づいて表示する表示手段50とを有する。
(もっと読む)
ロボット制御システムにおける通信接続方法及びロボット制御システム
【課題】
コントローラによるロボットの運転状態が再生モードである場合、可搬式操作装置のコントローラに対する通信接続を、生産に影響することなく円滑に行うことができるロボット制御システムにおける通信接続方法を提供する。
【解決手段】
ロボット制御システム100における通信接続方法は、TP10から、ネットワークを介してコントローラ30に通信のログイン要求(接続要求)があった場合、TP10に設けられたログイン処理部18が、非常停止スイッチ12の操作状態、及び、コントローラ30のモード状態を取得して、非常停止スイッチ12の操作状態が非常停止状態で、かつ、モード状態が再生モードのときは、通信の接続要求後のコントローラ30に対する通信接続を認めず、そうでない場合には、通信接続を認可する。
(もっと読む)
回転速度演算装置
【課題】算出した安定回転速度を表示するか否かを決定し、びびり振動を抑制できないような安定回転速度を作業者に知らせることのない回転速度演算装置を提供する。
【解決手段】安定回転速度の算出に用いたk値若しくは今回算出した安定回転速度と直前のk値を用いて算出した安定回転速度との差と、所定の設定値との比較にもとづいて安定回転速度を表示手段に表示するか否かを決定するようにした。したがって、たとえばk値が所定の設定値よりも大きく、びびり振動を効果的に抑制できないような安定回転速度については表示しない。つまり、表示手段には、びびり振動の抑制に比較的有効な安定回転速度のみが表示されるため、作業者にとって使い勝手が良い。
(もっと読む)
プログラム作成・教示装置及び方法
【課題】複雑な流れを持つロボットプログラムであっても、短時間で位置データの教示が可能なプログラム作成・教示装置及び方法を得ること。
【解決手段】作成したロボットプログラムを解析して、その中で使用される位置変数を抽出する工程(ステップS11)と、抽出した位置変数の中から、値を教示する必要のある位置変数を教示対象変数として選出する工程(ステップS12)と、ロボットプログラムの処理の流れに基づいて、教示対象変数を使用する命令が実行される順序に応じたグラフ構造で教示対象変数を配列させる工程(ステップS13)と、教示対象変数の教示受付時に、グラフ構造での配列に従って教示対象変数を順次表示する工程(ステップS14)とを有する。
(もっと読む)
21 - 40 / 92
[ Back to top ]