
Fターム[3D232DA15]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 操舵の状態 (8,167) | 操舵トルク (2,841)
Fターム[3D232DA15]に分類される特許
21 - 40 / 2,841
電動パワーステアリング制御装置
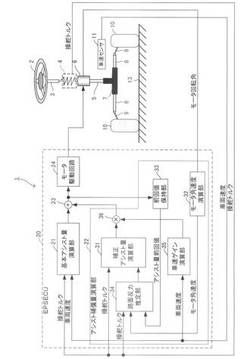
【課題】車両のヨー応答を低下させることなくロール振動を抑制する
【解決手段】EPSシステム1では、アシスト補償量演算部22が、車両の運転者によるハンドルの操作が反映された操舵トルクと、車両の挙動が反映された推定路面反力とに基づき、次の(a)および(b)の2つのゲイン特性を満たすようにアシスト補償量を演算する。(a)操舵トルクに対する補正アシスト量のゲイン特性については、操舵トルクの周波数が予め設定された第1設定周波数を超えると、周波数が高くなるにつれて補正アシスト量のゲインが徐々に減少する1次フィルタの形状を有する。(b)推定路面反力に対する補正アシスト量のゲイン特性については、推定路面反力の周波数が、第1設定周波数より高くなるように予め設定された第2設定周波数になるまでは、周波数が高くなるにつれて補正アシスト量のゲインが徐々に増加する、推定路面反力の微分特性を有する。
(もっと読む)
電動パワーステアリング装置

【課題】トルクセンサ、または電流センサの異常時においても、継続して安定したステアリング操作を行なうことのできる電動パワーステアリング装置を提供することにある。
【解決手段】ステアリングの操舵トルクを検出するトルクセンサと、操舵軸に加わる軸力を検出する軸力センサと、モータに流れる実電流を検出する電流センサとを備え、更に、トルクセンサ、軸力センサ及び電流センサの異常を検出する異常検出手段を有する。そして、上記異常検出手段により、軸力センサが正常、且つトルクセンサが異常の場合には、軸力センサにて、トルクセンサの値を推定する。また、軸力センサが正常、且つ電流センサが異常の場合には、軸力センサ及びトルクセンサにて、電流センサの値を推定することができる構成とした。
(もっと読む)
パワーステアリング装置
【課題】油圧制御バルブに発生した異常を車両運転中であっても検出することのできるパワーステアリング装置を提供する。
【解決手段】制御部は、判定部としての機能を有するとともに、スプールを目標回転角度θtまで変位させようとするときの電動モータの駆動電流値Iaに基づいて電動モータに発生しているトルクTaを推定する。そして、この推定されるトルクTaと予め設定されたトルクTtとの差が所定値α以上のときに油圧制御バルブに異常が発生している旨判定する。
(もっと読む)
ステアリング装置およびフォークリフト
【課題】機械的な接触を行うことなく、実際の操舵角を目標操舵角で適切に維持できるようにする。
【解決手段】実際の操舵角(検出操舵角)が目標操舵角に到達するまでは、ステアリング51の操作トルクに応じて操舵輪に付与される操舵トルクが、漸減舵角範囲にわたって上限値から下限値にまで減少していく一方、目標操舵角に到達した以降は、逆方向の操舵トルクが、この漸減舵角範囲よりも狭い急峻舵角範囲にわたって下限値から上限値にまで増加していく。このように、操舵トルクが変化する操舵角範囲を、目標操舵角への到達以降において狭くすることで、操舵トルクの変化率が大きくなるため、その到達前に比べて操舵トルクが急峻に上限値まで増加していく。こうして、実際の操舵角が目標操舵角に到達した以降は、逆方向の操舵トルクが十分に大きくならない、というような操舵角範囲も当然狭くなる(漸減舵角範囲>急峻舵角範囲)。
(もっと読む)
電動パワーステアリング装置
【課題】不良品を市場に出荷するのを防止することができると共に、安全な状態の内に部品を交換して、安全性や快適性を高めることのできる電動パワーステアリング装置を提供する。
【解決手段】コントロールユニット30Bを具備した電動パワーステアリング装置において、それぞれに割り当てられた診断時間の間、各部の異常診断を行い、検出した異常が確定した異常である場合は異常確定信号を出力し、検出した異常が確定には至らない不確定異常である場合は不確定異常信号を出力する複数の異常診断手段を設け、コントロールユニットに接続された検査装置50からコントロールユニットに電力を供給して、異常診断を実行するようになっており、検査装置は、複数の異常診断手段からの不確定異常の検出カウント値を記憶する機能と、確定した異常が発生する可能性の程度を判断する機能とを具備している。
(もっと読む)
車両の障害物回避装置
【課題】
減速による障害物回避と横移動による障害物回避とを適切に選択できる車両の障害物回避装置を提供すること。
【解決手段】
自車両前方の障害物を認識する障害物認識部11と、自車両が走行している左右両側の車線の車線境界線を認識する車線境界線認識部12と、認識された障害物と認識された車線境界線との間隔Wl,Wrを認識する間隔認識部14と、認識された間隔Wl,Wrが予め設定された自車両の幅Wv以下である方向への横方向への障害物回避を禁止し、間隔Wl,Wrが自車両の幅Wvより大きい方向への横方向への障害物回避を許可し、自車両が認識された車線境界線を跨いで走行しているときには横方向への障害物回避を許可し、横方向への障害物回避が禁止された場合には車両を減速させる回避方向選択部15と、を備えた。
(もっと読む)
車両用操舵装置及び荷役車両
【課題】車両旋回時、特にハンドルの戻し時に運転者の操舵負担を低減することができる車両用操舵装置及び荷役車両を提供する。
【解決手段】操舵部材10の操舵角を検出する操舵角検出部13と、操舵部材10に操舵反力を付与する反力アクチュエータ15と、車体のヨー角を検出するヨー角検出部33と、少なくとも操舵角検出部13によって検出された操舵角の関数として操舵反力を設定し、その設定された操舵反力を実現するように前記反力アクチュエータ15を制御する反力アクチュエータ制御部16とを備え、反力アクチュエータ制御部16は、ヨー角検出部33によって検出された車体のヨー角の変化に基づいて車体の旋回量を観測し、観測された旋回量が基準角以上であれば、前記操舵部材に付与する操舵反力を、通常よりも増大させる。
(もっと読む)
電動パワーステアリング装置
【課題】不良品を市場に出荷するのを防止することができると共に、安全な状態の内に部品を交換して、安全性や快適性を高めることのできる電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置において、各部の異常診断を行い、確定した異常である場合は異常確定信号を出力し、不確定異常である場合は異常判断信号を出力する複数の異常診断手段を設け、コントロールユニットに接続された検査装置からコントロールユニットに電力を供給して、異常診断を実行する。それぞれに割り当てられた診断時間の間、各部の検出した異常が確定した異常である場合に異常確定信号を出力する異常検出部と、確定に至らない不確定異常を異常検出部が検出した回数であるカウント値を記憶するカウント値記憶部と、カウント値に基づいて、各部に確定した異常が発生する可能性の程度を段階的に判断して異常判断信号を出力する判断部とで構成する。
(もっと読む)
油圧パワーステアリング装置
【課題】操舵補助装置に供給される作動油の量を正確に制御することに貢献する油圧パワーステアリング装置を提供する。
【解決手段】油圧パワーステアリング装置1は、パワーシリンダー20と、パワーシリンダー20に供給される作動油の流れを制御するロータリーバルブ70(以下、「バルブ70」)と、バルブ70を駆動する電動モーター50と、電動ポンプ24とバルブ70とを接続するポンプ吐出油路92と、パワーシリンダー20とバルブ70とを接続する各供給油路93,94と、電動モーター50を制御する制御部30とを有する。油圧パワーステアリング装置1は、シャフト42の回転角度を検出する回転角センサ60を有し、バルブ70は、電動モーター50のシャフト42と一体的に回転する弁体と、各油路92〜94と接続される空間を内部に有するハウジングとを有し、制御部30は、電動モーター50の制御に回転角センサ60の出力を反映する。
(もっと読む)
電動パワーステアリング装置
【課題】インバータのFETの駆動を簡易な構成と制御で安定的に行い得るようにした電動パワーステアリング装置を提供する。
【解決手段】PWMの各相デューティ指令値に基づいて、FETブリッジで成るインバータ106によりモータ20を駆動制御し、操舵系をアシスト制御するようになっている電動パワーステアリング装置において、FETブリッジの上段FETを駆動するための昇圧電源電圧を生成するチャージポンプ回路130及びブートストラップ回路140を具備し、高い方の電圧を昇圧電源電圧とする。
(もっと読む)
車両用操舵装置
【課題】操舵部材のロック状態が解除された直後から、精度の高いロータ回転角を演算することができる車両用操舵装置を提供する。
【解決手段】EPSモータ制御部33の動作モードには、通常モードと強制回転モードとがある。通常モードは、ステアリングロック装置4によってステアリングホイール1の回転がロックされていない通常運転状態においてEPSモータ7を駆動制御するモードである。一方、強制回転モードは、イグニッションキーがオンされた直後において、ステアリングロック装置4によってステアリングホイール1の回転がロックされている状態で、EPSモータ7を強制的に回転駆動するモードである。EPSモータ7が強制回転モードで回転駆動されているときに、回転角演算部34は、各磁気センサ21,22が感知している磁極を特定する。
(もっと読む)
車線逸脱防止制御装置
【課題】突発的な外乱が生じた場合であっても車線逸脱を防止できる車線逸脱防止制御装置を提供する。
【解決手段】自車両の走行車線からの逸脱を防止するように操舵機構に操舵力を付与する車線逸脱防止制御装置を、自車両の横速度を検出する横速度検出手段と、走行車線からの逸脱を防止する方向へ目標横位置と自車両の横位置との偏差に応じて該偏差が大きくなる程大きい変化量で増加する操舵力を設定する操舵力設定手段と、横速度の増加に応じて走行車線からの逸脱を防止する方向への操舵力を増加補正する操舵力補正手段と、操舵力補正手段によって補正された操舵力に基づいて操舵機構に操舵力を付与する操舵力制御手段とを備える構成とする。
(もっと読む)
電動パワーステアリング装置
【課題】 自動停止条件の成立後に操舵トルクが増加する場合であっても、操舵トルクの急変を抑制可能な電動パワーステアリング装置を提供する。
【解決手段】 電動パワーステアリング装置10は、ステアリング系20の操舵トルクを検出する操舵トルクセンサ41と、ステアリング系20に補助トルクを与える電動モータ43と、操舵トルクに基づく目標電流値で電動モータ43のモータ電流値を制御するモータ電流制御部42と、を備える。モータ電流制御部42は、自動停止条件が成立するとエンジンを停止させるアイドリングストップ制御部100の自動停止条件が成立することに起因して、目標電流値を目標電流上限値以下に設定する。目標電流上限値は、目標電流値を目標電流上限値以下に設定することを開始した時Tsの目標電流値Imsと関連する。
(もっと読む)
制御装置およびフォークリフト
【課題】装置構成の大型化およびコスト増加を抑えつつ、意図しない旋回を防止できるようにする。
【解決手段】検出ヨーレートが想定ヨーレートの所定範囲外となるような場合に(s160)、検出ヨーレートの作用による本体2の旋回を相殺する方向へ駆動輪53を操舵させるべく操舵トルクを付与しているため(s180)、これにより検出ヨーレートが想定ヨーレートに近い値となる結果、意図しない旋回を防止することができる。このとき、検出ヨーレートを、実際のステアリング51の操作に応じたヨーレートである想定ヨーレートと所定範囲以内に近似させることにより、効果的に意図しない旋回が防止される。
(もっと読む)
電動パワーステアリング装置
【課題】電動モータのトルクが伝達されるラックが可変比ラックである電動パワーステアリング装置において、操舵状況に応じた適切な操舵補助を実現できる電動パワーステアリング装置を提供する。
【解決手段】q軸電流指示値生成部は、現在のラック軸位置におけるアシスト側ラックゲインGaを求める。次に、q軸電流指示値生成部は、操舵トルクとアシスト側ラックゲインGaがラックゲイン基準値Gaoである場合のq軸電流指示値(基準q軸電流指示値Iqo*)との関係を記憶したマップを用いて、操舵トルクTに応じた基準q軸電流指示値Iqo*を求める。次に、q軸電流指示値生成部は、基準q軸電流指示値Iqo*を、アシスト側ラックゲインGaに対応したq軸電流指示値Iq*に変換する。
(もっと読む)
電動パワーステアリング装置
【課題】二重制御系統を備えた電動パワーステアリング装置において、サブマイクロコンピュータの実装を必要としない電動パワーステアリング装置を提供する。
【解決手段】制御装置5A,5Bを2系統有し、各制御装置5A,5Bは、相手系統の故障を推定する故障推定部56,66を備え、故障推定部56,66は、電動モータ1a,1bの出力値が目標指令値に収束する時間Teを監視し、この収束時間Teが基準時間γよりも長い場合に、他系の制御装置の故障を推定するものであり、他系の制御装置の故障を推定した正常側の制御装置は、正常側の制御装置の制御周期T0を短くしかつ制御ゲインK0を上げる制御を行う。
(もっと読む)
電動パワーステアリング制御装置
【課題】車載装置からの指令に基づく制御と通常のパワーステアリング制御との両立を安価な手段で実現可能な電動パワーステアリング制御装置を得る。
【解決手段】メインマイコン503とメインマイコン監視回路511とを備える。メインマイコン503は、トルク信号TRQに基づきパワーステアリング指示電流ImtEPSを決定するパワーステアリング制御部503cと、自動駐車制御信号PASigに基づき自動駐車制御電流ImtPAを決定する自動駐車制御部503dと、モータ電流指示値Imt1を切替える切替信号生成処理部503eおよびモータ電流切替部503fと、監視特性を切替える監視回路モード選択部503jおよび監視回路特性切替部503mとを有する。メインマイコン監視回路511は、モータ電流検出信号Imdが制限値を超えた場合に異常状態と判定して制御を停止する。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】d軸電流指令値設定部31、d軸電流偏差演算部32、ロータ角度制御部33、ロータ角度演算部34および速度演算部35から構成されるロータ角度推定手段によって、ロータ角度θが推定される。q軸電流指令値設定部21は、トルクセンサ1によって検出される操舵トルクおよび車速センサ2によって検出される車速に応じたモータトルクをモータ5から発生させるためのq軸電流指令値Iq*を設定する。d軸電流指令値設定部24は、d軸電流指令値Id*を設定する。q軸電流指令値Iq*と、d軸電流指令値Id*と、q軸電流検出値Iqと、d軸電流検出値Idと、推定されたロータ角度θとに基づいて、モータ5に供給される電流が制御される。
(もっと読む)
電動パワーステアリング装置
【課題】簡素な構成にて効果的に車両の偏向が抑えられ、快適な操舵フィーリングを得ることができる電動パワーステアリング装置を提供することにある。
【解決手段】電流指令値演算部22には、ローパスフィルタ処理後トルクTの変化量が所定値以内であり、かつローパスフィルタ処理後トルクTの変化量が所定値以内である時間が、所定時間以上継続した場合には、操舵トルクτを低減するための補正成分としてのリードプル補正量Iip*を演算するリードプル補正制御部27が設けられている。そして、電流指令値演算部22は、このリードプル補正制御部27の演算するリードプル補正量Iip*を、加算器28において、基本アシスト制御部26の演算する基礎成分としての基本アシスト制御量Ias*に重畳することにより、そのパワーアシスト制御における目標アシスト力としての電流指令値Iq*を演算する。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】電動モータの抵抗の推定精度が低下することを抑制することのできる電動パワーステアリング装置の制御装置を提供する。
【解決手段】電動パワーステアリング装置の電子制御装置30は、測定電流Imaおよび測定電圧Vmaを用いて第1抵抗値Raを算出する第1抵抗算出部61と、この第1抵抗算出部61とは異なる手段により第2抵抗値Rbを算出する第2抵抗算出部62とを有する。そして第2抵抗値Rbよりも小さい第1抵抗値Raを演算抵抗値として確定する。
(もっと読む)
21 - 40 / 2,841
[ Back to top ]