
Fターム[3D232DC03]の内容
走行状態に応じる操向制御 (73,124) | 信号処理 (9,699) | 微分処理 (878)
Fターム[3D232DC03]に分類される特許
21 - 40 / 878
モータ制御装置及び電動パワーステアリング装置
【課題】1シャント式でモータの電流検出を行い、作動音が少なく、トルクリップルを減少させたモータ制御装置及びそれを装填した電動パワーステアリング装置を提供する。
【解決手段】PWMの各相デューティ指令値に基づいてインバータでモータを駆動制御すると共に、1シャント式電流検出器で前記モータの各相モータ電流を検出するようになっているモータ制御装置において、インバータの電源電圧、各相デューティ指令値、モータの逆起電圧情報、電流検出器で検出された各相モータ電流、PWMの配置情報及びモータの電気的特性式より電流検出補正値を算出する電流検出補正部を具備し、電流検出補正値により電流検出器で検出された各相モータ電流をモータ平均電流に補正してモータを駆動制御する。
(もっと読む)
電動パワーステアリング装置

【課題】弱め界磁電流指令値の急変による異音や振動の発生が許容範囲となる立ち上がり、立下りが的確に設定できる電動パワーステアリング装置を提供する。
【解決手段】時点t1での基準値0から弱め界磁電流指令値Id*に到達するまでの立ち上がり区間での時間微分値を、時点t2での弱め界磁電流指令値Id*から基準値0に到達するまでの立ち下がり区間での時間微分値に比較して大きな値に設定することで、時点t1における立ち上がり区間では、トルク変動を低減して異音や振動の発生を抑制しながら高速時に急に操舵された場合等における弱め界磁制御の効果の発生が間に合うようになり、時点t2における立ち下がり区間では、時間微分値を小さな値に設定しているので、より一層トルク変動を低減して異音や振動の発生をより抑制することができる。
(もっと読む)
電動パワーステアリング装置
【課題】車輪回転速度が設計的に持つ誤差に起因するセルフアライニングトルクの誤推定による制御異常出力を防止することができる電動パワーステアリング装置を提供する。
【解決手段】操舵トルク検出手段で検出した操舵トルクに基づいて第1のトルク指令値を演算する第1のトルク指令値演算手段31と、車輪回転速度に基づいて第2のトルク指令値を演算する第2のトルク指令値演算手段32と、操舵トルクの異常を検出したときに、第1のトルク指令値に代えて第2のトルク指令値をモータ制御手段に出力する異常時切換手段34と備えている。第2のトルク指令値演算手段32は、車輪回転速度に基づいて推定したセルフアライニングトルク推定値に不感帯を設定し、不感帯反映後のセルフアライニングトルクに基づいて第2のトルク指令値を演算する。
(もっと読む)
規範応答演算装置およびそれを用いた車両用操舵装置
【課題】 規範応答のゲインおよび位相の特性を独立に設定できる規範応答演算装置およびそれを用いた車両用操舵装置を提供する。
【解決手段】 入力信号uに基づいて規範ヨー応答のベース値を演算する線形フィルタ14と、入力信号uの微分値du/dtを出力する微分器15と、入力信号uの微分値du/dtに基づいてゲインyを演算する非線形フィルタ17と、規範応答ベース値にゲインyを乗算して規範ヨー応答を演算する乗算器18と、を備える。
(もっと読む)
電動パワーステアリング装置
【課題】不良品を市場に出荷するのを防止することができると共に、安全な状態の内に部品を交換して、安全性や快適性を高めることのできる電動パワーステアリング装置を提供する。
【解決手段】コントロールユニットを具備した電動パワーステアリング装置において、それぞれに割り当てられた診断時間の間、各部の異常診断を行い、検出した異常が確定した異常である場合は異常確定信号を出力し、検出した異常が確定には至らない不確定異常である場合は不確定異常信号を出力する複数の異常診断手段を設け、コントロールユニットに接続された検査装置からコントロールユニットに電力を供給して、異常診断を実行するようになっており、検査装置は、複数の異常診断手段からの不確定異常の検出カウント値を記憶する機能と、確定した異常が発生する可能性の程度を判断する機能とを具備している。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】高い静粛性を確保しつつ、より安定的にレゾルバレス制御を実行することのできるモータ制御装置を提供すること。
【解決手段】F/B制御部47は、F/Bゲイン可変制御部80が演算するフィードバックゲインを用いて、トルク偏差Δτに基づくトルクフィードバック制御を実行することにより第1変化成分dθτを演算する。また、F/Bゲイン可変制御部80は、第1変化成分dθτを加算角θaとする「第1の演算モード」、及び第1変化成分dθτを推定モータ回転角速度ωm_eにより補正した値を加算角θaとする「第2の演算モード」の各演算モードに応じて、二種類の異なるフィードバックゲインK1,K2を演算する。そして、第1の演算モードに用いるフィードバックゲインK1は、第2の演算モードに用いるフィードバックゲインK2との比較において、より応答性が高くなるように設定される。
(もっと読む)
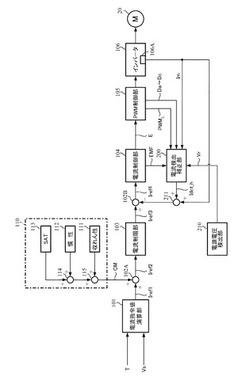
モータ制御装置及び電動パワーステアリング装置
【課題】演算用モータ抵抗値の算出精度を向上させることができるモータ制御装置及び電動パワーステアリング装置を提供する。
【解決手段】モータ12を制御するECU11は、モータ12に流れる電流検出値Ieを検出する電流値検出部31と、モータ12に印加される端子間電圧Vtを取得する入力電圧設定部37と、電流検出値Ie及び端子間電圧Vtに対してフィルタ処理を施すフィルタ部40と、モータ12で発生する誘起電圧Eを算出する誘起電圧推定部43と、デューティ比微分値ΔDを算出する変化量算出部41と、フィルタ後電圧値Vtfをフィルタ後電流値Iefで除算してモータ12の今回の抵抗算出値Re(n)を求める抵抗算出部72と、誘起電圧Eが基準値以下であると共に、デューティ比微分値ΔDが基準変化量以下である場合に、今回の抵抗算出値Re(n)に基づき今回の演算用モータ抵抗値R(n)を設定する抵抗設定部73と、を備える。
(もっと読む)
油圧式パワーステアリング装置
【課題】油圧制御バルブの開度が急変して作動油の圧力が低下した場合に、パワーシリンダへの作動油の供給量が低下するのを抑制できる油圧式パワーステアリング装を提供する。
【解決手段】ポンプ回転数補正部63は、バルブ開度指令微分値演算部71と、ポンプ回転数補正値演算部72と、補正値加算部73とを含んでいる。バルブ開度指令微分値演算部71は、バルブ開度指令値設定部52によって設定されるバルブ開度指令値θB*の時間微分値(バルブ開度指令微分値)を演算する。ポンプ回転数補正値演算部72は、バルブ開度指令微分値に基づいて、ポンプ回転数指令値VP*の補正値(ポンプ回転数補正値)を演算する。補正値加算部73は、ポンプ回転数補正値を、ポンプ回転数指令値設定部62によって設定されたポンプ回転数指令値VP*に加算する。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】非干渉化制御を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置および電動パワーステアリング装置を提供する。
【解決手段】モータ(1)の回転角度を微分してモータ回転角速度を演算するモータ回転角速度演算手段(60)と、そのモータ回転角速度を信号処理するローパスフィルタ(63)を有する。そして、モータの回転角度と、ローパスフィルタのゲインの関係を示すマップ(61)から演算された値により、ローパスフィルタ(63)のゲインを変更するローパスフィルタゲイン変更手段(80)を有する。そして、ゲインが変更されたローパスフィルタ(63)に基づいて出力されるモータ回転角速度に基づき、モータの逆起電力により発生する電流を相殺するように、モータに電流を流す非干渉制御を実行する。
(もっと読む)
車両用操舵装置
【課題】ステアリングギア比を車速に応じて変化させる場合であっても、ドライバに対し、車速に関係なく適切な操舵量をイメージさせる。
【解決手段】車速Vに基づきステアリングギア比Gおよび転舵角δを算出し(ステップS1、S2)、さらに車速Vおよび操舵角θに応じた操舵反力成分T(V,θ)と、フリクション成分Tfと、操舵角速度θ′に応じた操舵反力成分T(θ′)との和から操舵反力Tを演算し(ステップS3〜S8)、操舵反力成分T(V,θ)を、車速Vが大きいときほど小さな値となる特性とする。車速Vが大きいときほど操舵反力Tは抑制されるため、ステアリングギア比を車速に応じてステアリングギア比が大きくなる特性とした場合でも、ステアリングホイール1に付与される操舵反力は車速に関係なくほぼ同等程度となる。そのためドライバは操舵量をイメージしやすくなり、的確な操舵を行うことができる。
(もっと読む)
車両の自動走行制御装置
【課題】車両の自動走行制御装置に関し、動特性が変動した場合においても、目標走行ラインを安定して自動走行させる。
【解決手段】道路情報を検出するカメラ11と、目標走行ラインを設定する目標走行ライン設定部22と、目標走行ラインに対する車両の横方向相対位置を検出する相対位置検出部11,23と、車両重量を算出する車両重量演算部14,21と、車両を目標走行ラインに沿って走行させるための目標操舵角を算出する目標操舵角演算部25と、目標操舵角に基づいて自動操舵電流を算出する自動操舵電流演算部26と、自動操舵電流に応じてステアリング2を目標操舵角に回動させるアクュエータ15とを備えた。
(もっと読む)
電動パワーステアリング装置
【課題】
電動パワーステアリング装置に異常が発生して操舵補助が停止された場合に、ディファレンシャルギアをアクティブ制御することによって、運転者の操舵感に違和感を与えることなく代替操舵補助を行うことのできる電動パワーステアリング装置を提供する。
【解決手段】
電動パワーステアリング装置の異常を検出する異常検出部と、左右の車輪の回転数差を調整するためのディファレンシャルギアとを設け、異常検出部が電動パワーステアリング装置の異常を検出したときに、ディファレンシャルギアが車両状態に基づいて代替操舵補助を行う。
(もっと読む)
パワーステアリング装置
【課題】コストの高騰を抑制しつつも転舵輪の舵角を検出することのできるパワーステアリング装置を提供する。
【解決手段】ステアリングホイール側ピニオン軸2に設けられた出力側レゾルバ7の軸倍角をk1とし、モータ側ピニオン軸に設けられたモータ側レゾルバ13の軸倍角をk2とし、モータ側ピニオン軸を一回転させたときにラック軸3を介して上記ステアリングホイール側ピニオン軸2が回転する回転角度をθa°とした場合に、(θa/k2)>(360/k1)であって、且つ(θa/k2)/(360/k1)が整数でない値となるように設定する。これにより、出力側レゾルバ出力信号S2の値とモータ側レゾルバ出力信号S3の値との組み合わせが、異なる舵角で同一の値をとることがなくなり、両レゾルバ出力信号S2,S3から舵角を導出することが可能となる。
(もっと読む)
電動パワーステアリング装置
【課題】3相電動モータで1相に異常が発生したときに、操舵フィーリングを悪化させることなく、残りの2相を用いてモータ駆動を継続できる電動パワーステアリング装置を提供する。
【解決手段】異常検出手段で各相コイルのうちの1相の駆動系統に通電異常を検出したとき、異常時モータ指令値算出手段34で、操舵補助電流指令値Irefに基づいて残りの2相のコイルを使用する異常時相電流指令値を算出し、その異常時相電流指令値に基づいて3相電動モータ12を駆動する。その際、操舵トルク及び前記3相電動モータ12で発生する操舵補助トルクの和と外力との釣合い時に、前記異常時相電流指令値を低下させる電流指令値補正手段を備えている。
(もっと読む)
トルクセンサ及びこれを備えた電動パワーステアリング装置
【課題】検出コイル、非磁性の円筒部材、センサシャフト部を使用してトルク検出を行う際に、検出コイルへの磁束量を増加させて検出精度を向上させることができるトルクセンサ及びこれを使用した電動パワーステアリング装置を提供する。
【解決手段】一対の検出コイル13a,13bの内周面側に所定間隔を保って対向して入力軸及び出力軸の一方に連結された非磁性の円筒部材12を配置し、該円筒部材12の内周面側に、軸方向の凸条11aを円周方向に所定間隔で形成し、前記入力軸及び出力軸の他方に連結されたセンサシャフト部11を配置し、前記円筒部材12は、前記一対の検出コイルに個別に対向し、円周方向に位置を異ならせて形成された前記一対の検出コイルで互い逆方向にインピーダンスを変化させる一対の磁束透過用窓12a,12bを形成し、該一対の磁束透過用窓の軸方向両端部に空気より透磁率の高い磁路部材17を配置した。
(もっと読む)
電動パワーステアリング装置
【課題】電動モータの電気的抵抗が精度良く推定することが可能となる電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置は、電動モータ20の電気的抵抗の推定値に基づいて同電動モータ20の回転速度を算出する。そして、舵角センサ54の出力が舵角一定条件を満たすとき、かつ、電動モータ20の誘起電圧が誘起電圧一定条件を満たすとき、電動モータ20の電気的抵抗の推定値を推定して更新する。
(もっと読む)
モータ制御装置
【課題】モータトルクの変動を緩慢にすることができ、操舵フィーリングを向上させることができるモータ制御装置を提供する。
【解決手段】速度指令値設定部21は、トルクセンサ1によって検出される操舵トルクThおよび車速センサ2によって検出される車速Vsに応じたモータトルク(アシストトルク)をモータ5から発生させるためのq軸電流指令値に対応したロータ回転速度を、速度指令値ω*として設定する。速度偏差演算部22は、速度指令値設定部21によって設定された速度指令値ω*と、速度演算部34によって演算されたロータ回転速度ωとの偏差(ω*−ω)を演算する。速度制御部23は、速度偏差演算部22によって演算された偏差(ω*−ω)に対して比例積分演算(PI演算)を行なうことによって、q軸電流指令値Iq*を演算する。
(もっと読む)
ステアリング制御装置
【課題】車両の走行安定性を向上させることが可能なステアリング制御装置の提供。
【解決手段】位相検出部18は、操舵輪側で発生する実舵角θbがステアリングホイール側で発生する操舵角θaに対して一方の回転方向へ先行して変化する進み位相状態であるか否かを判定し、実舵角θbが進み位相状態である場合、モータベクトル制御部17は、上記一方の回転方向に対して反対方向へ向かう制動トルクを発生させる指令信号をモータ3へ出力する。
(もっと読む)
電動パワーステアリング装置
【課題】簡易な構成でタイヤのグリップの喪失を検出でき、グリップロス度を位相補償し、補正操舵トルク又は補正係数を演算して電流指令値を高速に補正し、車両挙動の一層の安定化が可能な電動パワーステアリング装置を提供する。
【解決手段】モータの角速度に基づいて収れん性制御信号を出力する収れん性制御部と、車両のラック軸上に生じる外力をSAT検出値として検出するSAT検出部と、路面から生じるSATを車両モデルに基づいてSAT推定値として推定するSAT推定部と、SAT検出値及びSAT推定値に基づいてタイヤのグリップが失われた度合いを表すグリップロス度を検出するグリップロス度検出部と、グリップロス度を位相補償する位相補償部と、位相補償されたグリップロス度に基づいて補正操舵トルクを演算する補正値演算部とを具備し、補正操舵トルクと収れん性制御信号とで電流指令値を補正する。
(もっと読む)
電動パワーステアリング装置
【課題】車速によらず、制御安定性を確保するとともに、操舵フィーリングが低下することのない電動パワーステアリング装置を提供する。
【解決手段】電動モータにアシストトルクを発生させるアシスト電流Iaの値を、操舵トルクセンサ30により検出された操舵トルクVT3の値で割った除算値(アシスト電流/操舵トルク=Ia/VT3)が大きい程、操舵トルクセンサ30から出力される操舵トルクVT3に対して大きな遅れ位相補償(小さな進み位相補償)を施すようにしたので、制御安定性が確保されるとともに、操舵フィーリングが低下する除算値の小さい領域では、大きな進み位相補償を施すようにしたので、良好な操舵フィーリングが得られる。よって、低速での操舵フィーリングも低下することがない。
(もっと読む)
21 - 40 / 878
[ Back to top ]