
Fターム[5F031FA02]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送の形態 (16,275) | ウエハ以外の基板(ダミーも含む)の移送 (1,711)
Fターム[5F031FA02]に分類される特許
201 - 220 / 1,711
基板処理装置及び基板搬送方法並びにその方法を実施するためのプログラムを記憶する記憶媒体
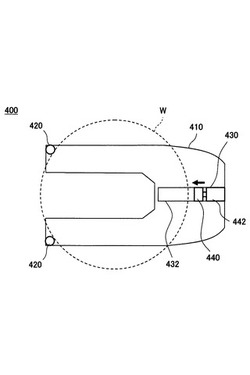
【課題】ピックによる基板保持時に基板の異常を判定することで,異常な基板の搬送処理を続行することによる不具合を未然に防止する。
【解決手段】基板が水平方向に移動しないように規制する規制体420と,押圧体440をスライド駆動させて,ウエハWの端部を規制体に押しつけることによって保持する押圧保持部430と,押圧体を駆動させるとともに,その押圧体の位置情報を出力可能な押圧体駆動部442とを有するピックを備え,このピックの基板保持時に押圧体をスライド駆動させてその押圧体が停止した位置を検出し,その検出位置が異常判定閾値以上にピックの先端側にある場合にはその基板は異常であると判定し,その基板の搬送処理を停止する。
(もっと読む)
基板処理装置

【課題】基板表面上に吐出された処理液の滞留を防止し基板全面における処理の均一化を有効に達成できる基板処理装置を提供する。
【解決手段】スプレーパイプ部22と、スプレーパイプ部22の長手方向に一列に互いに近接して形設され処理液をその吐出口26から基板Wの表面102へ吐出する複数のノズル部24から構成される複数のスプレーノズル14とを備える基板処理装置において、基板Wの表面102に対する複数のノズル部24の吐出口26の対向角度を、水平姿勢で搬送される基板Wの表面102の基板搬送方向Xに関して交差する方向における中央部付近から両端部付近にかけて、鉛直線に対して漸次大きくなるように、複数のノズル部24を複数のスプレーパイプ部22に形設することにより、基板Wの表面102上において吐出後の処理液の積極的な液流れを発生させる。
(もっと読む)
基板搬送装置
【課題】ガラス基板の位置決め時に、搬送ローラーとガラス基板との擦れがない基板搬送装置を提供する。
【解決手段】ガラス基板を処理装置内あるいは処理装置間で、受け渡しや受け入れを行う際に用いられる搬送装置であって、前記ガラス基板を載置し搬送するローラーの内周部に、ローラーの回転方向に対して垂直の方向に設けられた可動溝と、ガラス基板をローラー上に載置して位置決めする際に、前記可動溝に沿って先端がリングによって可動する可動部を有する可動部支持体と、前記可動溝に沿って可動部が可動することによってローラーがガラス基板の位置決め方向に傾いた状態を保持しながらローラーを回転させるためのストッパと、を有するローラーが1本のシャフトに1つまたは複数備えられ、更に前記シャフトが複数備えられたことを特徴とする基板搬送装置。
(もっと読む)
基板搬送装置
【課題】従来よりも小型であり、併せてランニングコストを低減することができる基板搬送装置を提供する。
【解決手段】基板搬送装置10は、水平かつ上向きの加熱面を有する加熱ユニット12と、この加熱ユニット12の加熱面に沿って基板100を搬送するための3台の昇降可能なチェーン式コンベヤ18と、を備えている。コンベヤ18は、上昇状態で基板100を搬送し、当該基板100が所定の停止位置に到達すると、下降される。これにより、基板100は、コンベヤ18の搬送側キャリア26の上面と加熱ユニット12の加熱面とから成る一連の基板載置面上に載置され、当該基板載置面を介して、一様に加熱される。この加熱後、コンベヤ18は、改めて上昇され、基板100を搬送する。
(もっと読む)
基板を処理するクラスタツールアーキテクチャ
【課題】システムスループットを増加させ、処理シーケンスCoOを低減する機器を提供する。
【解決手段】実施形態は、一般的に、スループットを増加させ、信頼性を増加させたマルチチャンバ処理システム(例えばクラスタツール)を使用して基板を処理する機器および方法を提供する。クラスタツール内で処理される基板は繰り返し可能性が高く、システムフットプリントが小さい。クラスタツールの一実施形態では、基板をまとめてグループ化して移送することで、基板を2枚以上のグループ毎に処理してシステムスループットを増加することにより、また、処理チャンバの間で基板のバッチを移送する際の動作数を低減することで、ロボットの疲労を低減し、システムの信頼性を増加させることにより所有権のコストが低減される。実施形態はまた、システムの停止時間を低減し、基板移送処理の信頼性を増加させるために使用される方法および機器を提供する。
(もっと読む)
基板処理装置及び基板処理方法
【課題】基板搬送ロボットの搬送速度を向上させ、処理効率を向上させることが可能な基板処理装置を提供する。
【解決手段】基板処理装置が、基板に熱処理を施す処理室と、第1基板支持部を有し該第1基板支持部で基板を支持して搬送する第1搬送ロボットが設けられ、該第1搬送ロボットが、前記処理室から基板を取り出すことのない搬送ロボットである第1搬送室と、第2基板支持部を有し該第2基板支持部で基板を支持して搬送する第2搬送ロボットが設けられ、該第2搬送ロボットが、前記処理室から基板を取り出す搬送ロボットである第2搬送室とを備えるように構成し、前記第1搬送ロボットに設けられた第1基板支持部の摩擦力を、前記第2搬送ロボットに設けられた第2基板支持部の摩擦力よりも大きくする。
(もっと読む)
搬送装置、処理システム、搬送装置の制御方法およびコンピュータ読み取り可能な記憶媒体
【課題】 減圧環境下においても、障害物と接触したことを検出することが可能な搬送装置を提供すること。
【解決手段】 前進後退が可能な、搬送体Gを支持する支持部材71と、支持部材71が前進したとき、支持部材71の先端が障害物に接触したことを検出するセンサ8と、を備え、センサ8が、支持部材71の先端に接地された状態で設けられた、可撓性を有する第1の導電性リング81と、第1の導電性リング81の内側に、第1の導電性リング81から離隔して設けられた、第2の導電性リング82と、第1の導電性リング81が障害物に接触し変形して第2の導電性リング82に接触したとき、第1の導電性リング81と第2の導電性リング82とが短絡したことを検出する検出器と、を含む。
(もっと読む)
基板処理装置
【課題】本発明は基板処理装置を提供する。
【解決手段】本発明による基板処理装置は、基板が引入される側のアラインメント領域と基板処理工程が行われる工程領域とに区画されたチャンバと、引入された基板をアラインメントして工程領域に移送し、工程終了後に基板をアラインメント領域に移送するキャリアと、チャンバ内でのアラインメント領域と工程領域との間に形成され、工程領域で発生した汚染物質がアラインメント領域に流入されることを遮断し、キャリアの移送に応じて開いたり、閉じたりするシールドと、を含むことを特徴とする。
(もっと読む)
搬送装置、基板処理システム及び姿勢制御機構
【課題】保持台の姿勢を正確に制御することができ、また高速で移動させても保持台がふらつくことがない搬送装置を提供する。
【解決手段】搬送装置に、第一の姿勢保持リンク56、及び第二の姿勢保持リンク57を設ける。第一の姿勢保持リンク56の一端と第二の姿勢保持リンク57の一端とは連結軸53によって回転可能に連結される。保持台21の基部プレート27にレール51,52を取り付ける。連結軸53にローラ54,55を所定の軸線の回りを回転可能に取り付ける。ローラ54,55はレール51,52のローラ転走部51a,52aに接触するように配置される。保持台21を移動させるとき、ローラ54,55がローラ転走部51a,52aを転がり運動する。
(もっと読む)
基板搬送ロボット
【課題】搬送ロボットを用いて、カセットに収容された液晶基板等の板状の基板を搬出する際に、基板検出センサを用いて基板の位置を検出していた。従来は、基板がカセットの手前側(入り口側)に寄せられてカセット内部に収容されていたが、基板がカセットの奥側に寄せられる場合があり、従来の搬送ロボットでは対応できない。
【解決手段】本発明の搬送ロボットは、振動吸収体6の先端部に取り付けられた基板の有無を検出する基板検出センサ5と、ハンドの位置を移動させる移動機構11(アーム機構2等)と、ハンドの位置及び移動速度を制御する動作制御部12と、基板のエッジ位置を演算する基板エッジ位置解析部13とを備えた。上記構成にすると、基板がカセットの奥側に寄せられて収容された場合であっても、基板の位置を検出できる。
(もっと読む)
基板受渡装置及び基板受渡方法
【課題】昇降ピン及び昇降ピンの昇降機構無しでローラコンベア上の基板を直交する方向から搬送アームのフォークを挿入して、搬送アームに受け渡す基板受渡装置(方法)を提供する。
【解決手段】基板Gを水平方向に搬送可能なローラコンベアRC1と、基板を水平、鉛直方向及び鉛直軸回りに回転自在に移動可能なフォーク101を有する搬送アーム110と、を具備し、ローラコンベアは、駆動シャフト55に適宜間隔を置いて駆動ローラ56を装着した駆動ローラ列と、フリーローラシャフト57に適宜間隔を置いてフリーローラ59を回転自在に装着したフリーローラ列を並列に配列し、フリーローラ列を隣接する駆動ローラ列側へ移動して、駆動ローラ列とフリーローラ列の間に空間Iを形成するフリーローラ駆動用シリンダ65を具備する。空間に搬送アームのフォークを搬送方向と直交する方向から挿入して、第1ローラコンベア上の基板を搬送アームに受け渡す。
(もっと読む)
貼り合わせ装置および貼り合わせ方法
【課題】精度良く貼り合わせを行うことが可能な貼り合わせ装置を提供する。
【解決手段】本発明に係る貼り合わせ装置は、ウエハ42とガラス41とを貼り合わせる装置であり、ウエハ42とガラス41との貼り合わせに先立ってウエハ42とガラス41との位置合わせを行う位置合わせ手段を有する、減圧可能なロードロック室6と、位置合わせされたウエハ42とガラス41とを貼り合わせる貼り合わせ手段を有する、減圧可能な接合室7とを備えている。ロードロック室6および接合室7は、位置合わせされた少なくとも一組のウエハ42およびガラス41が、ロードロック室6から接合室7に減圧下で移動可能となるように形成されている。
(もっと読む)
リンク式ロボットアーム装置
【課題】アームの制御性低下を効果的に抑制するとともに、吸着ON・OFF状態の切替応答性が向上するリンク式ロボットアーム装置を提供する。
【解決手段】アームの先端側に配置され且つ吸着用エア供給口C3を有するエンドエフェクタCによって搬送対象物を吸着保持可能なリンク式ロボットアーム装置Xとして、アーム1の内部に設けたエア管4を介して吸着用エア供給口C3に接続され、吸着用エア供給口C3に吸着用エアを供給可能な状態と、吸着用エア供給口C3への吸着用エア供給を停止する状態との間で切替可能な吸着切替ユニット3を備え、この吸着切替ユニット3を、アーム1のうちアーム長1Lの半分1Cよりもシータ軸J3に近い位置に設けた。
(もっと読む)
基板処理装置の調整方法
【課題】本発明は、搬送機構の搬送先の位置調整を単純な構成で低コストにできる基板処理装置の調整方法を提供する。
【解決手段】
調整工程においては、ピン75に代えて、治具100を使用する。治具100は、取付穴72aにはめ込むことが可能な直径6mmの円筒形の胴部101と、その胴部101と同軸に形成された直径8mmの円筒形の頭部102とからなる。ウエハWがサセプタ72上に載置されるべき正しい位置から外れて載置されたときにはそのウエハWと治具100が接触するので、オペレータはハンドHがウエハWを治具100に接触せずに載置できるように、ハンドHの位置等を調整する。
(もっと読む)
板状物用トレイと板状物の積層方法
【課題】板状物を撓んだ状態で保持するトレイで、板状物の機能を有する部分を、他と接触させずに、板状物同士、所定の間隔を保持した状態で、重ねて、搬送、保管が簡単に、効率的にでき、振動よる板状物の品質面の問題を解消できるトレイを提供する。
【解決手段】全体を支持する基材で、枠内側領域が前記板状物より大きい枠部20と、枠部に支持され、枠部の枠内側領域において、板状物を鉛直方向下側に撓ませた状態でその下側から保持する板状物保持部30とを備え、枠部は、トレイを複数重ねる際の重なり部であり、トレイを複数重ねる際にその表裏が互いに面接触するように形成されているもので、板状物保持部の板状物を載せない側の面である裏面の少なくとも一部に、板状物を載せたトレイを複数重ねた状態において、板状物と接触して振動を抑制する、振動抑制部材40が取り付けられている。
(もっと読む)
固定機構、ワークの固定方法、およびワークの固定解除方法
【課題】平板状のワークを起立姿勢で良好に固定する固定機構、並びにこの固定機構によるワークの固定方法およびワークの固定解除方法を提供する。
【解決手段】押さえ枠72は、環状とされており、ワーク3の外縁部を押さえる。複数の付勢部材73は、バネ等の弾性部材により形成されており、押さえ枠72の4隅のうちの対応するコーナーと連結されている。複数の可動クランプ部61(61a〜61c)のそれぞれは、押さえ枠72に対して近接または離隔する方向に進退する。固定クランプ部62は、押さえ枠72付近に固定されている。また、複数の可動クランプ部61および固定クランプ部62のそれぞれは、押さえ枠72に沿って設けられている。これにより、ワーク3の外縁部は、複数の可動クランプ部61および固定クランプ部62と、押さえ枠72と、によって良好に挟み込まれる。
(もっと読む)
有機ELデバイス製造装置及び製造方法
【課題】
本発明は、より均一な成膜を実現できる、或いは高精彩なデバイスを製造できる有機ELデバイス製造装置及び製造方法を提供することである。
【解決手段】
本発明は、複数の受けピンを介して基板を水平状態の蒸着ステージで受渡し、前記蒸着ステージを回転させて略直立姿勢または直立姿勢にし、真空チャンバ内で前記基板に蒸着材料を蒸着する有機ELデバイス製造装置または製造方法において、前記複数の受けピンの先端より上方に前記蒸着ステージを移動し、前記基板を前記複数の受けピンから前記蒸着ステージに移載し、その状態で前記回転を行うことを特徴とする。
(もっと読む)
板状部材移載設備
【課題】板状部材を立てた状態でラックに挿入したり、立てた状態のままラックから取り出したりすることができる板状部材移載設備を提供する。
【解決手段】ストッカ設備1は、ガラス板2が立てた状態で前後方向に並べて収納されるラック32と、ガラス板2を左右に移動させてラック32との間で受け取りするトラックロボット10を備えている。トラックロボット10は、トラック側走行基台14と、フリップと、トラック側搬送基台と、ローラとを有する。フリップは、フリップアクチュエータによりトラック側走行基台14に対して軸線回りに回動し、回動することでそこに載せられたガラス板2を立てたり倒したりするように構成されている。ローラは、トラック側搬送基台に回動可能に設けられ、回動することでガラス板2をラック32内に送れるように構成されている。
(もっと読む)
ステージ移動装置およびパターン描画装置
【課題】高速移動時においてもステージの位置精度を向上する。
【解決手段】パターン描画装置1では、ステージ移動機構2が、定盤11の定盤面12に平行に伸びるとともにそれぞれの先端部がステージ3に接続される第1シャフト211および第2シャフト221、第1シャフト211および第2シャフト221を進退させる第1シャフト進退機構212および第2シャフト進退機構222、並びに、第1シャフト進退機構212を回動するシャフト回動機構23を備える。これにより、複数のリニアガイドや支持台が上下方向に積み重ねられたステージ移動機構に比べて、ステージ移動機構2の重心を低くすることができる。その結果、ステージ3の高速移動時においても、ステージ3のピッチングを防止してステージ3の移動制御における位置精度を向上することができる。
(もっと読む)
露光システム及びその制御方法
【課題】センサにより計測されたアライメントのズレ量を、各装置を制御するためのレシピを用いて補正することにより、アライメント処理時間を短縮し、露光ラインを止めずにアライメント補正することを可能として、スループットを向上させることができる露光システム及びその制御方法を提供する。
【解決手段】制御装置21は、前回のプリアライメント時に検出された基板ステージ16と基板Wとのズレ量E1、E2に基づいて算出した補正値をプリアライメント制御レシピR1に書き込むと共に、露光装置13における前回の基板WとマスクMとのアライメント調整時に検出された基板WとマスクMとのズレ量e1、e2に基づいて算出した補正値を露光制御レシピR2に書き込む。そして、次回のプリアライメント及び露光の際、プリアライメント制御レシピR1及び露光制御レシピR2に基づいてプリアライメント装置12及び露光装置13を制御する。
(もっと読む)
201 - 220 / 1,711
[ Back to top ]