
国際特許分類[G05B19/18]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 制御系または調整系一般;このような系の機能要素;このような系または要素の監視または試験装置 (12,533) | プログラム制御系 (7,632) | 電気式 (7,631) | 数値制御 (2,851)
国際特許分類[G05B19/18]の下位に属する分類
位置決めまたは輪郭制御系に特徴があるもの,例.1つのプログラムされた点から他の点に位置を制御する,またはプログラムされた連続経路に沿って運動を制御するもの (138)
測定用制御装置に特徴のあるもの,例.較正および初期値設定,機械加工のための被加工物の測定 (1)
位置決め用制御装置に特徴のあるもの,例.被加工物の孔に対する工具の心出し,位置を正確にするための付加的検知手段
補正用制御装置に特徴のあるもの,例.バックラッシュ,オーバーシュート,ツールオフセット,ツール摩耗,温度,機械構造誤差,負荷,慣性に対するもの (477)
監視または安全に特徴のあるもの (311)
データの取り扱いまたはデータのフォーマットに特徴のあるもの,例.データの読み取り,バッファリングまたは変換 (42)
マニュアルデータインプット (143)
パートプログラミングに特徴のあるもの,例.パートプログラムと呼ばれるNC機械の制御情報を得るための,技術図面から得られる幾何学的情報の取り込み,これと機械加工および材料の情報との結合 (313)
NC機械を制御するための設計データの使用に特徴のあるもの,例.CAD/CAM (157)
補間に特徴のあるもの,例.従うべき経路とその経路に沿った移動速度を定義するためのプログラムされた終点間における中間点の計算 (80)
制御系の構成,例.共有コントローラまたはマルチプロセッサシステム,サーボのためのインターフェイス,プログラマブルインターフェイスコントローラ (203)
プログラム実行,すなわち,パートプログラムまたは機械機能の実行,に特徴のあるもの,例.プログラムの選択 (145)
速度,加速または減速の制御に特徴のあるもの (190)
国際特許分類[G05B19/18]に分類される特許
11 - 20 / 651
機械における原点位置調整方法および原点位置調整機能を有する機械
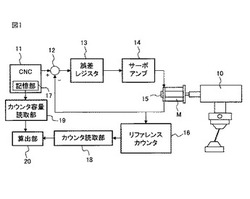
【課題】作業時間を短くしつつ、原点位置をさらに容易に設定する。
【解決手段】位置検出器を備えたサーボモータによって駆動される可動部(10)の機械原点位置調整機能を有する機械は、位置検出器により検出された値をカウントするレファレンスカウンタ(16)と、可動部を所定の方向に移動させて機械原点位置に位置決めしたときのレファレンスカウンタの容量を記憶した記憶部(17)と、可動部を位置決めしたときのレファレンスカウンタの値を読み取るレファレンスカウンタ読取部(18)と、レファレンスカウンタのカウンタ容量を読み取るカウンタ容量読取部(19)と、レファレンスカウンタの値とレファレンスカウンタ容量とに基づいて機械原点位置の調整量を算出する調整量算出部(20)と、を含む。
(もっと読む)
数値制御装置及び制御方法

【課題】工具が被加工物やジグに干渉しない場合のみ工具を待機位置まで工具交換前に移動できる数値制御装置及び制御方法を提供する。
【解決手段】CPUは加工プログラム中に軸移動指令がある場合、主軸ヘッドの軸移動パラメータを算出しRAMに記憶する(S19)。軸移動パラメータは次工具の送り軸毎の最小座標値と最大座標値である。加工プログラム中に工具交換指令がある場合、工具交換前の軸移動を指示するブロックの軸移動パラメータをRAMから取得する(S15)。工具が被加工物又はジグ装置に干渉する領域を示す干渉パラメータは不揮発性記憶装置に記憶されている。干渉パラメータに基づき、軸移動パラメータが非干渉条件を満たすか否か判断し(S16)、非干渉条件を満たす場合(S16:YES)、工具交換前の軸移動指令にポット加工指令を追加する(S17)。
(もっと読む)
数値制御装置
【課題】第2主軸台と振止台の同時トルクスキップを実現する。
【解決手段】数値制御装置は、第2主軸台の駆動指令を第2主軸台サーボ制御部に出力する第2主軸台補間処理部23と、入力された目標位置に基づいて振止台の駆動指令を振止台サーボ制御部に出力する振止台補間処理部24と、第2主軸台のサーボ駆動軸の駆動トルクτ2を検知する検出部11と、加工プログラムを介して同時トルクスキップ動作の実行が指示された場合に、前記駆動トルクτ2とトルク制限値τ1とを比較し、前記駆動トルクτ2が前記トルク制限値にτ1に達した場合には、前記第2主軸台補間処理部23に第2主軸台の駆動停止を指示するトルク判定部5と、を備え、前記振止台補間処理部24は、前記トルク判定部5により前記駆動トルクτ2が前記トルク制限値にτ1に達したと検知された場合に、前記振止台の移動目標位置として前記振止台の現在位置を設定する。
(もっと読む)
ロボットの電磁ブレーキ制御装置
【課題】多関節型ロボットのアーム等を駆動するサーボモータにおいて、そのサーボモータが有する非励磁作動型の電磁ブレーキの発熱を抑制することのできる電磁ブレーキ制御装置を提供する。
【解決手段】多関節型ロボットの各関節に駆動軸を駆動するモータ21〜26が設けられ、CPU30は、その各モータ21〜26が有する非励磁作動型の電磁ブレーキ21b〜26bによる駆動軸の制動を制御する。CPU30は、駆動軸の制動を解除する期間において、電磁ブレーキ21b〜26bの励磁コイル21c〜26cへの電圧印加を繰返しON及びOFFするON−OFF制御を実行しつつ、駆動軸の制動が解除された状態を維持する。CPU30は、駆動軸の制動を解除する期間の初期において所定期間にわたって電圧印加のON期間を維持する。
(もっと読む)
ロボット制御装置、外乱判定方法およびアクチュエータ制御方法
【課題】ロボットアームに加わる外乱を高精度に検出することが可能なロボット制御装置、外乱判定方法およびロボット制御方法。
【解決手段】実施形態のロボット制御装置は、アームの駆動軸を回転駆動するアクチュエータと、前記駆動軸の回転角度をサンプリング周期ごとに検出する第1検出部と、前記アクチュエータの駆動トルクの推定値と、前記駆動トルクの真値との差分を算出する算出部と、前記アームに加わる外乱を検出する第2検出部とを備え、前記第2検出部は、前記差分を変数とする時系列モデルのパラメータを推定し、前記パラメータを当てはめることで、第1サンプリング周期の当該時系列モデルを更新する更新部と、前記第1サンプリング周期の時系列モデルと前記第1サンプリング周期よりも過去の第2サンプリング周期の時系列モデルとを比較して、前記アームへの外乱の有無を判定する判定部とを備える。
(もっと読む)
異常判定装置、駆動装置及びロボット装置
【課題】異常判定をより短時間に行う。
【解決手段】被駆動部を駆動する駆動装置を動作させる動作電流の電流値を複数の動作パターンを有する駆動装置の動作に応じて検出する検出部と、検出部によって検出された電流値と、動作パターンごとに関連付けて予め設定された動作電流の許容範囲とに基づいて、駆動装置の動作が異常であるか否かを判定する判定部とを備える。
(もっと読む)
工作機械における回転軸回転速度のモニタ方法及びモニタ装置、工作機械
【課題】びびり振動の抑制に対して回転軸の回転速度にかかわらず最適な変動周期を表示し、短時間で容易に最適なパラメータに設定可能とする。
【解決手段】回転速度を変動させると、モニタ14には、回転速度の変動振幅Qと変動周期Pとの関係を示す変動図20が表示され、変動図20には、現在の設定値Aの他、変動振幅Qと変動周期Pとの設定可能範囲21と、以下の式(1)に基づいた最適変動周期PO及び/又は式(2)に基づいた変動周期Pの最適範囲P1が表示される。Tは回転軸の回転周期、a,amin,amaxは予め設定される係数である。
PO=aT ・・・(1)
aminT≦P1≦amaxT ・・・(2)
(もっと読む)
工作機械の衝突防止方法
【課題】工作機械の動作中に移動する主軸台のカバーと工具との衝突を確実に、かつオペレータに過度の負担をかけることなく簡単に防止できる工作機械の衝突防止方法を提供する。
【解決手段】主軸方向であるZ軸方向に移動可能な移動主軸と、当該移動主軸を軸支する移動主軸台と、Z軸方向及びZ軸に直交するX軸方向に移動可能な少なくとも一つの刃物台と、当該刃物台に取り付けられた工具タレットとを備える工作機械の衝突防止方法であって、前記移動主軸台と前記刃物台とのZ軸方向の相対距離が予め規定しているZ軸方向の許容値以下であることを検出する第一のステップと、次にその時点で加工位置に割出されている工具のX軸方向の刃先位置が、前記移動主軸台のカバーのX軸方向の長さに基づいて予め規定しているX軸方向の許容値以下であることを検出する第二のステップと、次に前記移動主軸台の移動を停止する第三のステップを備える。
(もっと読む)
ワーク設置誤差補正部を有する多軸工作機械用数値制御装置
【課題】直線3軸および回転3軸を備える多軸工作機械において、ワーク設置誤差を補正する。
【解決手段】数値制御装置10は指令解析部11でプログラム指令を解析し、補間部12で各軸の補間位置を作成し、工具位置方向計算部で工具位置と工具方向を求め、その工具位置と工具方向に対して設置誤差量に基づいて補正工具位置と補正工具方向を計算し、補正直線軸位置と補正回転軸位置を計算する。ワーク設置誤差補正部13は各軸の補間位置を指令位置として、設置誤差量およびトレランス量記憶部14に格納された設置誤差量(並進誤差量(δx,δy,δz)、回転誤差量(α,β,γ))とトレランスD0によってワーク設置誤差補正の計算を行い直線軸3軸の補正直線軸位置と回転軸3軸の補正回転軸位置を求め、求められた補正直線軸位置と回転軸3軸の補正回転軸位置に基づいて各軸のサーボ15X,15Y,15Z,15A,15B,15Cを駆動する。
(もっと読む)
ロボットとその制御方法
【課題】ロボットが複数の動作を実行する場合に、そのうちの特定の動作に制限されずに、各動作における条件の変化を考慮して、各動作において正常動作中に誤作動することなく過負荷を確実に検出し安全に停止させることができるロボットとその制御方法を提供する。
【解決手段】複数の動作を実行するロボット10の制御方法であって、エンドエフェクタ12に作用する外力を検出する力センサ14と、3次元空間内でエンドエフェクタの位置と姿勢を移動可能なロボットアーム16と、ロボットアームを制御するロボット制御装置20とを備え、(A)外力の閾値をロボットの動作毎に記憶し、(B)ロボットアームを制御して各動作を順次実行し、(C)各動作の実行中に力センサで検出された外力が、前記閾値を超えた場合に、ロボットアームを停止する。
(もっと読む)
11 - 20 / 651
[ Back to top ]