
Fターム[3D232DD17]の内容
走行状態に応じる操向制御 (73,124) | 制御方式 (7,388) | フィードバック制御 (1,615)
Fターム[3D232DD17]に分類される特許
41 - 60 / 1,615
パワーステアリング装置
【課題】路面からの逆入力により発生する操舵機構の振動をより精度良く検出することができるパワーステアリング装置を提供する。
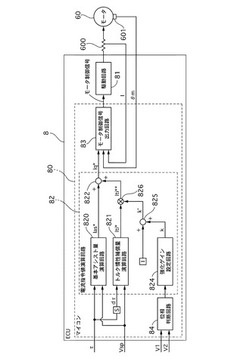
【解決手段】入力軸(第3コラムシャフト)に設けられ、入力軸に生じる歪振動を検出する第1歪センサと、出力軸(ピニオンシャフト)に設けられ、出力軸に生じる歪振動を検出する第2歪センサと、第2歪センサの出力信号である第2歪振動V2の位相が第1歪センサの出力信号である第1歪振動V1よりも進んでいるか否かを判断する位相判断回路84と、位相判断回路84が、第2歪振動V2の位相が第1歪振動V1の位相よりも進んでいると判断するとき、路面から操舵機構に対して作用する逆入力トルクが作用していると判断し、逆入力トルクが低減する方向に電動モータ60の駆動電流を補正する駆動電流補正回路(強化ゲイン設定回路824)と、を有する。
(もっと読む)
電動パワーステアリング装置

【課題】アシスト開始時間を短かくすることの可能な電動パワーステアリング装置を提供する。
【解決手段】EPSの備えるマイコンは、イグニッションスイッチがオンされた後、ECUがモータを通電制御する前に、モータまたはモータ駆動回路の故障診断処理を行う。ステアリングホイールとともに回転するモータの角速度が所定値よりも大きい場合(S1:YES)、処理は、故障診断の実施を省略する(S7:YES)。これにより、イグニッションスイッチがオンされてからモータの通電制御を開始するまでの時間が短縮される。
(もっと読む)
電動パワーステアリング装置
【課題】ヒステリシスを考慮して電動モータに供給する電流量を制御することで、操舵フィーリングの向上および安全性の向上を図ることができる技術を提供する。
【解決手段】ステアリングホイールの操舵トルクに応じた値を検出するトルク検出部210と、実際の操舵トルクとトルク検出部が検出する検出値との間のヒステリシスを考慮してトルク検出部210が検出した検出値を補正するトルク値補正部220と、トルク値補正部220が補正した検出値に基づいて電動モータ110に供給する目標電流を算出する目標電流算出部20と、を備え、トルク値補正部220は、トルク検出部210が検出した検出値に応じた補正量を用いて、操舵トルクが小さい場合にはヒステリシスを小さく、操舵トルクが大きい場合にはヒステリシスを大きくするように補正する。
(もっと読む)
路面摩擦係数推定装置及び方法
【課題】タイヤすべり角に対するコーナーリングフォースの傾きが路面摩擦係数の関数となることを利用して、路面摩擦係数を推定する。
【解決手段】タイヤの横滑り角βとコーナーリングフォースCFを算出し、前記算出されたタイヤの横滑り角βとコーナーリングフォースCFとの比ΔCF/Δβに基づいて、路面の摩擦係数を推定する路面摩擦係数推定部28を備える。前記路面摩擦係数推定部28は、路面摩擦係数μが異なる複数の路面を走行してタイヤの横滑り角βとコーナーリングフォースCFとを検出してそれらの関係を数値で若しくは数式化してメモリ29に保存しており、前記メモリ29に保存された関係を用いて、実際の走行時に路面の摩擦係数を算出する。
(もっと読む)
車両のパワーステアリング制御装置
【課題】パワーステアリングによりダンピング補正を精度良く適切に行って、スッキリとした操舵フィーリングを維持し、たとえ、比較的素早い切り返し操舵時等であってもドライバがしっかりステアリングホイールを握らなくても安定感のある操舵フィーリングを実現する。
【解決手段】車速Vと操舵トルクTsを基に基本アシストトルクTbを設定し、ヨーレートγとハンドル角速度(dθH/dt)とが同符号の場合は、アシスト補正量ΔTaを0とし、ヨーレートγとハンドル角速度(dθH/dt)とが異符号の場合は、ヨーレートの絶対値|γ|に基づいてダンピング補正量Gdを算出してこのダンピング補正量Gdとハンドル角速度(dθH/dt)とに基づいてアシスト補正量ΔTaを算出し、アシスト補正量ΔTaで基本アシストトルクTbを補正してアシストトルクTaとする。
(もっと読む)
車両のパワーステアリング制御装置
【課題】アシストトルクに対する補正量のピークの位相を遅らせることなく、操舵状態の切り替わり時の急激な変化を抑制することができる車両のパワーステアリング装置を提供する。
【解決手段】操舵制御部20は、ドライバによる操舵状態が切り増し状態のときと切り戻し状態のときとで選択的に切り替わる操舵ゲインG0を生成し、当該操舵ゲインG0を無次元数G0’に変換してレートリミット処理を行い、レートリミット処理後の操舵ゲインGを用いて基本アシストトルクTbを補正して最終的なアシストトルクTaを演算する。これにより、基本アシストトルクTbに対するアシスト補正量ΔTaのピークの位相を遅らせることなく、操舵状態の切り替わり時の急激な変化を抑制することができる。
(もっと読む)
車両用操舵装置及び荷役車両
【課題】操舵角に対する反力特性を適切に設定することにより、運転者の操舵負担を低減することができる車両用操舵装置及び荷役車両を提供する。
【解決手段】操舵部材10の操舵角を検出する操舵角検出部13と、操舵部材10に操舵反力を付与する反力アクチュエータ15と、少なくとも操舵角検出部13によって検出された操舵角の関数として操舵反力を設定し、その設定された操舵反力を実現するように前記反力アクチュエータ15を制御する反力アクチュエータ制御部16とを備え、反力アクチュエータ制御部16は、操舵角検出部13によって検出された操舵角が第1の切替角θh1以下の第1の舵角領域Iにあるか、第1の切替角θh1を超える第2の舵角領域IIにあるかを判定し、操舵角が第1の舵角領域Iにあるときに操舵角の増加に伴って操舵反力を最大値まで立ち上げ、操舵角が第2の舵角領域IIに入ると操舵角の増加に伴って操舵反力が前記最大値から単調に減少するように反力アクチュエータを制御する。
(もっと読む)
車両のパワーステアリング制御装置
【課題】特に、中立位置からのステアリングホイールの切り出しにおいて、ドライバが感じるフリクション感を適切に打ち消して滑らかで良好な操舵フィーリングを実現する。
【解決手段】車速Vと操舵トルクTsを基に基本アシストトルクTbを設定し、ハンドル角の絶対値|θH|が高いほど操舵する方向への基本アシストトルクTbを増大させる方向に補正する第1の補正値ΔT1を設定し、ハンドル角速度の絶対値|dθH/dt|が高いほど操舵する方向への基本アシストトルクTbを減少させる方向に補正する第2の補正値ΔT2を設定し、少なくともステアリングホイールの中立位置からの切り始めにおいて第1の補正値ΔT1と第2の補正値ΔT2との差を第1の補正値ΔT1で補正する方向におけるアシスト補正量ΔTaとして算出し、こうして求めたアシスト補正量ΔTaで基本アシストトルクTbを補正して制御量としてモータ駆動部21に出力する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】通電不良の発生に伴う二相駆動時のモータ回転を円滑化して安定的に高い出力性能を確保することのできるモータ制御装置及び電動パワーステアリング装置を提供すること。
【解決手段】マイコンは、所定のサンプリング周期で取得した各電流センサの出力信号に基づいて、モータの各相電流値を検出する。そして、今回の検出値とともに少なくとも前回の検出値が保持される。そして、当該二相駆動時には、今回の電流検出時における回転角と前回の電流検出時における回転角との間に漸近線に対応する所定の回転角を挟む場合には、その保持された今回の検出値及び前回の検出値について、その絶対値がより大きな値となるように補正する。
(もっと読む)
電動パワーステアリング装置
【課題】モータロックを防止することにより、システムの安定的な停止が図れ、安全な電動パワーステアリング装置を提供する。
【解決手段】
マイコン17は、短絡異常検出フラグがオンの場合には、短絡異常判定検出中と判断して、積算判定を実行する。そして、マイコン17は、短絡異常確定フラグがオンの場合には、通電不良発生相以外の二相を通電相とするアシスト力を発生中に、通電不良発生相が、通電不良発生相以外の二相のうちの一相と短絡異常確定となったと判断して、アシスト力の発生を停止する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】1シャント式でモータの電流検出を行い、作動音が少なく、トルクリップルを減少させたモータ制御装置及びそれを装填した電動パワーステアリング装置を提供する。
【解決手段】PWMの各相デューティ指令値に基づいてインバータでモータを駆動制御すると共に、1シャント式電流検出器で前記モータの各相モータ電流を検出するようになっているモータ制御装置において、インバータの電源電圧、各相デューティ指令値、モータの逆起電圧情報、電流検出器で検出された各相モータ電流、PWMの配置情報及びモータの電気的特性式より電流検出補正値を算出する電流検出補正部を具備し、電流検出補正値により電流検出器で検出された各相モータ電流をモータ平均電流に補正してモータを駆動制御する。
(もっと読む)
後輪操舵車両
【課題】後輪トー角可変制御装置を備えた車両において、後輪を操舵しても操舵フィーリングを悪化させないパワーステアリング装着車両を提供する。
【解決手段】後輪操舵式の自動車1において、左右の前輪4L,4Rを転舵するステアリングホイール11と、ステアリングホイール11の作動に応じて左右の前輪の転舵をアシストするEPSトルクを付与する電動パワーステアリング装置16と、左右の後輪6R,6Lに対して設けられた左右の伸縮アクチュエータ21L,21Rを個別に駆動制御することにより、左右の後輪6のトー角を前輪4の操舵方向と同相または逆相あるいはトーインまたはトーアウトに変化させる後輪トー角可変制御装置20とを備え、電動パワーステアリング装置16は、左右の後輪6のトー角に応じてEPSトルクを増減させるように構成する。
(もっと読む)
回転電機制御装置、および、これを用いた操舵制御システム
【課題】簡単な構成で、回転電機の駆動停止時に発生するラジオノイズを低減可能な回転電機制御装置を提供する。
【解決手段】マイコン41は、各相の巻線11、12、13に流す目標電流値を算出する。マイコン41は、算出した目標電流値に基づき、各相の巻線毎にパルス状のPWM信号を生成する。プリドライバ42およびインバータ30は、マイコン41により生成されたPWM信号に基づき、各相の巻線11、12、13に電圧を印加する。マイコン41は、モータ10の駆動を停止させる制御をするとき、全ての各相のPWM信号のパルス変化のタイミングと、他の各相のPWM信号のパルス変化のタイミングとがいずれも異なるようにPWM信号を生成する。
(もっと読む)
電動パワーステアリング装置
【課題】弱め界磁電流指令値の急変による異音や振動の発生が許容範囲となる立ち上がり、立下りが的確に設定できる電動パワーステアリング装置を提供する。
【解決手段】時点t1での基準値0から弱め界磁電流指令値Id*に到達するまでの立ち上がり区間での時間微分値を、時点t2での弱め界磁電流指令値Id*から基準値0に到達するまでの立ち下がり区間での時間微分値に比較して大きな値に設定することで、時点t1における立ち上がり区間では、トルク変動を低減して異音や振動の発生を抑制しながら高速時に急に操舵された場合等における弱め界磁制御の効果の発生が間に合うようになり、時点t2における立ち下がり区間では、時間微分値を小さな値に設定しているので、より一層トルク変動を低減して異音や振動の発生をより抑制することができる。
(もっと読む)
モータ制御装置及び車両用操舵装置
【課題】回生制御の実行時においてもモータの各相電流値を検出することができるモータ制御装置を提供すること。
【解決手段】マイコンは、三角波δが山となるタイミングTbで上段側の各FETを全てオンにするような制御信号を出力する第1周期C1、及び下段側の各FETを全てオンにするような制御信号を出力する第2周期C2を交互に繰り返すことにより、その回生制御を実行する。そして、この回生制御の実行時、マイコンは、第1周期C1において三角波δが山となるタイミングTbで取得された各電流センサの出力値をオフセット電流値Ix0として、第2周期C2において第1周期C1と同じタイミングTbで取得された補正前電流値Ix1を補正することにより、モータの各相電流値を検出する。
(もっと読む)
車両姿勢制御装置
【課題】タイヤのグリップ状態およびスリップ状態の双方において、車両仕様の変更による影響を受けることなく、目標方向に対する車両の進行方向のずれを小さくすることのできる車両姿勢制御装置を提供する
【解決手段】ヨーレートセンサの出力を「実ヨーレートγ」とし、車両1の左右中心軸C上に存在する任意の基準点において、進行方向DFが車両1の左右中心軸Cのうち基準点よりも前方の部分に対してなす角を「車体すべり角β」とし、目標方向BFが車両1の左右中心軸Cのうち基準点よりも前方の部分に対してなす角を「目標すべり角β*」とし、目標すべり角β*と車体すべり角βとの差(β*−β)を「角度差Δβ」とする。所定の目標方向BFに対する車両1の進行方向DFの角度を制御するために、車両姿勢制御装置は、角度差Δβの符号と実ヨーレートγの符号との関係に応じて車両1の前輪31,32および後輪33,34の少なくとも一方を制御する。
(もっと読む)
規範応答演算装置およびそれを用いた車両用操舵装置
【課題】 規範応答のゲインおよび位相の特性を独立に設定できる規範応答演算装置およびそれを用いた車両用操舵装置を提供する。
【解決手段】 入力信号uに基づいて規範ヨー応答のベース値を演算する線形フィルタ14と、入力信号uの微分値du/dtを出力する微分器15と、入力信号uの微分値du/dtに基づいてゲインyを演算する非線形フィルタ17と、規範応答ベース値にゲインyを乗算して規範ヨー応答を演算する乗算器18と、を備える。
(もっと読む)
電動パワーステアリング制御装置
【課題】制御系全体の安定化のために制御系に設ける補償機能を簡素な構成で実現できるようにすることを目的とする。
【解決手段】目標アシストトルク演算部20にて目標アシストトルク(目標電流)を演算し、モータ6の実電流Imをその目標電流に一致させるための電流指令である基本指令を電流制御部120が演算する構成において、目標アシストトルク演算部20に位相補償器を設けていた従来の構成に対し、目標アシストトルク演算部20には位相補償器を設けず、代わりに電流制御部120に対して電流安定化補償器31をアドオンする。電流安定化補償器31は、伝達関数がs(微分演算子)の4次以下の関数で表されるものであり、実電流Imに基づき、制御系全体を安定化させるための補償指令を生成する。そして、基本指令が補償指令によって補償されてなる電流指令が、駆動回路130に入力される。
(もっと読む)
電動パワーステアリング制御装置
【課題】路面負荷に応じた操舵反力の特性の実現と、車両全体としての適切な操作安定性の実現とを両立させることが可能な電動パワーステアリング制御装置を提供する。
【解決手段】ベースアシスト部20は、路面反力に応じた操舵反力がハンドル側に返ってくるようにするためのベースアシスト指令Tb*を生成し、補正部30は、車両の不安定な挙動が適切に収斂するようにベースアシスト指令Tb*を補正するための補正トルク指令Trを生成する。そして、これら各指令Tb*,Trの和が最終的なアシストトルク指令Taとなる。ベースアシスト部20は、自身が生成したベースアシスト指令Tb*と実際に検出された操舵トルクTsに基づいて路面負荷を推定し、その推定した推定負荷Txに基づいて目標操舵トルクTs*を生成し、その目標操舵トルクTs*と操舵トルクTsの偏差に基づいてベースアシスト指令Tb*を生成する。
(もっと読む)
多相回転機の制御装置
【課題】 2組の巻線組を有する多相回転機の駆動を制御する、2系統のインバータを備えた制御装置において、故障した系統のインバータまたは対応する巻線組で発生する電流を抑制し、過剰な発熱を防止する。
【解決手段】 第1系統インバータ601および第2系統インバータ602は、それぞれモータ80(多相回転機)を構成する2組の巻線組801、802に電力を供給する。仮に、第1系統の故障検出手段751がインバータ601のショート故障を検出したとき、制御部65は、第1系統インバータ601への出力を停止する。また、正常系統である第2系統インバータ602への出力について、回転角センサ85が検出したモータ80の回転数Nが高いほど出力を小さくするように制限する。これにより、逆起電圧によって発生する電流を抑制し、故障系統(第1系統)における過剰な発熱を防止することができる。
(もっと読む)
41 - 60 / 1,615
[ Back to top ]