
Fターム[3D232DD17]の内容
走行状態に応じる操向制御 (73,124) | 制御方式 (7,388) | フィードバック制御 (1,615)
Fターム[3D232DD17]に分類される特許
121 - 140 / 1,615
電動パワーステアリング装置
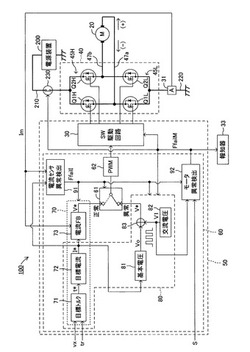
【課題】電流センサが故障した場合でも、アシスト制御中にモータの断線や短絡といった異常を検出できるようにする。
【解決手段】電流センサ異常検出部91により電流センサ31の異常が検出された場合、基本電圧演算部81が目標電流I*に比例した基本電圧V0を計算し、電圧値重畳部83が、基本電圧V0に、交流電圧信号生成部82から出力された交流電圧信号である重畳信号V1を加算して電圧指令値V*を求める。モータ異常検出部92は、操舵トルクtrの振動の大きさを計算し、振動の大きさが基準値未満となる場合には、モータ20の通電路に異常が生じていると判定する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置

【課題】モータ制御の安定性を損なうことなく、効果的にモータ電流を抑制することのできるモータ制御装置を提供することにある。
【解決手段】電流指令値演算部61は、演算周期毎に、目標操舵トルクτ*と実際の操舵トルクとの間のトルク偏差Δτに基づいてγ軸電流増減値を演算し、当該γ軸電流増減値を積算することによりγ軸電流指令値Iγ*を演算する。そして、そのγ軸電流指令値Iγ*には、下限値が設定される。
(もっと読む)
電動パワーステアリング装置
【課題】端当て回数を計数して管理すると共に、端当て回数に応じた電流制限値を算出してアシストを制限することにより、構成部品の軽量、小型化を図った電動パワーステアリング装置を提供する。
【解決手段】操舵トルク及び操舵トルクを微分した微分操舵トルクに基づいて端当てを検出し、端当て検出信号を出力する端当て検出手段と、端当て検出手段で検出された端当て回数1を計数する計数手段と、通算端当て回数を記憶して保持している記憶手段と、計数手段からの端当て回数1と記憶手段からの通算端当て回数とを加算した端当て回数2に対応した電流制限値を算出する電流制限値算出手段とを具備し、電流制限値算出手段で算出された電流制限値に基づいて電流指令値を制限する。
(もっと読む)
車両用操舵装置
【課題】タイヤの横力に応じた反力をドライバに返すことにより、優れた操舵フィーリングを持つ車両用操舵装置を提供する。
【解決手段】操舵トルクを検出するためのトルクセンサ13と、車速を検出するための車速センサ14と、操舵補助力を発生するための操舵補助電動モータ20と、トルクセンサ13の検出操舵トルク及び車速センサ14の検出車速とに基づいて操舵補助電動モータ20を駆動制御するEPS制御部21とを備える。EPS制御部21は、操舵トルクと車速とに基づいてタイヤの滑り角βを推定し、推定されたタイヤの滑り角βと検出車速とを用いてタイヤの横力Fを推定する。推定されたタイヤの横力Fに基づいてアシスト量を調整し、操舵補助電動モータ20を駆動する。
(もっと読む)
電動パワーステアリング装置
【課題】製造工数を低減することができる技術を提供する。
【解決手段】ステアリングホイールに操舵補助力を与える電動モータと、ステアリングホイールに連結される第1の回転軸と、第1の回転軸とトーションバーを介して連結される第2の回転軸と、第1の回転軸と第2の回転軸との相対回転角度を検出する磁気センサと、ステアリングホイールに操舵トルクが付与されていないときの磁気センサの出力値である基準値を記憶する記憶部とを有し、記憶部に記憶された基準値と磁気センサの出力値とに基づいて操舵トルクを検出するトルク検出装置と、外部装置と通信を行うために外部装置のコネクタと接続される接続コネクタ16を有するとともに、トルク検出装置が検出した操舵トルクに基づいて電動モータの駆動を制御する制御ユニット10と、を備え、トルク検出装置の記憶部に基準値を記憶させる処理を、制御ユニット10の接続コネクタ16を介して行うことを可能にする。
(もっと読む)
舵力評価装置、及び、舵力評価方法
【課題】操舵時に機械的に検出される実舵力とドライバが感じる感受舵力との関係を定量的に評価することができる舵力評価装置を提供する。
【解決手段】操舵制御部20は、ステアリングホイール4に対する実舵力Tsを提示しながら基準舵力T0までの操舵をドライバに促すことで基準舵力T0をドライバに知覚させた後、実舵力Tsを提示しない状態で基準舵力の所定倍nに設定された複数の指示舵力n・T0までの操舵をドライバに順次促すことで各指示舵力n・T0に対ししてドライバが入力した実舵力Tsとの関係をサンプリングし、実舵力Tsに対応する指示舵力n・T0をステアリングホイール4に対してドライバが入力したと感じる感受舵力Th_bとして定義して、実舵力Tsと感受舵力Th_bとの関係を示す感受特性を関数近似する。
(もっと読む)
車両および車両制御プログラム
【課題】搭乗者の進行したい方向を正確に汲み取りながら走行予定軌道を選択して自動走行を行うことができる車両および車両制御プログラムを提供すること。
【解決手段】第3車両位置予測処理(S107)によって、ステアリングホイール13の回転角速度Δδを取得してステアリングホイール13の操舵角を算出し、そのステアリングホイール13の操舵角から前輪2FL,2FRへ付与される操舵角を算出して、その前輪2FL,2FRへ付与される操舵角と車両速度とに基づいて車両1のヨーレートを推定し、その推定したヨーレートから所定時間後の車両位置を予測する。これにより、搭乗者の進行したい方向を、所定時間後の車両位置まで特定して把握しているので、予測された車両位置に基づいて走行軌道を選択することによって、搭乗者の進行した方向を正確に汲み取りながら走行予定軌道を選択して、自動走行を行うことができる。
(もっと読む)
電動パワーステアリング装置の制御方法
【課題】電動パワーステアリング装置の操作フィーリングを向上するとともに、電源変動に対する耐性を向上する。
【解決手段】電動パワーステアリング装置の制御部10は、電源50の出力電圧値の変動にともなって、デューティ比モータ電流値特性が変化する現象に対処することができる。具体的には、F/Fデューティリミット値設定部53は、電圧値計測部51によって計測された電源50の出力電圧値を用いて、フィードフォワード制御を行う範囲を示す折れ点のデューティ比を推定する。また、ゲイン補正値設定部54は、折れ点以降の傾きの変化に対処するために、電源50の出力電圧値に基づいて、フィードバック制御におけるゲインの補正値を推定する。そして、制御部10は、推定した折れ点のデューティ比およびゲインの補正値を用いて、モータ電流Imの電流応答性を同じにすることができる。
(もっと読む)
車両のパワーステアリング装置
【課題】ドライバのフィーリングに合致した操舵アシスト力を発生させることができるパワーステアリング装置を提供する。
【解決手段】操舵制御部20は、操舵時にドライバが入力する実舵力Tsと当該実舵力Tsに対してドライバが入力したと感じる感受舵力Th_bとの関係について設定した感受特性を用い、基本アシスト力Tassist_bを付与した操舵系に対してドライバが操舵を行う際のハンドル角θと実舵力Tsとの関係を示す実舵力特性Ts(θ)を、ハンドル角θと感受舵力Th_bとの関係を示す感受舵力特性Th_b(θ)に変換し、この感受舵力特性Th_bを線形的に変化させるために必要な補間量ΔThを示す感受舵力補間特性を設定するとともに、感受特性を用いて感受舵力補間特性を変換して舵力補間特性を設定する。
(もっと読む)
加加速度情報を用いた車両の運動制御装置および方法
【課題】非定常な車両加減速状態を含む車両のダイナミクスの変化に応じて、制御ヨーモーメント量を調整すること。
【解決手段】車両のヨーモーメントを制御する制御手段を備えた車両の運動制御装置において、車両の前後方向の速度を検出する第1の検出手段と、車両の横方向の加加速度を検出する第2の検出手段と、を有し、前記制御手段は、前記第2の検出手段により検出した車両の横方向の加加速度(Gy_dot)を、前記第1の検出手段により検出した車両の前後方向の速度(V)で除した車両のヨー角加速度(r_ref_dot)に基づいて車両のヨーモーメントの制御指令を生成し、前記制御指令を出力する車両の運動制御装置。
(もっと読む)
電動パワーステアリング装置
【課題】構造を複雑にすることなく耳障りな歯打ち音等の発生を抑制する技術を提供する。
【解決手段】ステアリングホイールに操舵補助力を与える電動モータと、電動モータの回転駆動力が伝達されるウォームギアと、前輪を転舵させるラック軸を移動させるピニオンシャフトと、ピニオンシャフトと同軸的に連結された下部連結シャフトとの相対回転角度を検出する相対角度検出装置と、ウォームギアと噛み合うことにより電動モータの回転駆動力をピニオンシャフトに伝達するウォームホイールと、相対角度検出装置が検出した相対回転角度に基づいて電動モータの駆動を制御する制御装置と、を備え、制御装置は、前輪側から外力を受けて相対回転角度が周期的に変化する場合に、ウォームギアの歯とウォームホイールの歯とが衝突する際に生じる歯打ち音の周波数を変更するように電動モータの駆動を制御する。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】操舵トルクに対して電流指令値が零に設定される不感帯が適正に設定できない場合でも、モータ電流零の状態を検出してモータ電流検出値のオフセット誤差を補正する電動パワーステアリング装置の制御装置を提供する。
【解決手段】電流指令値I、操舵トルクT、及び操舵速度Vを読み込み、操舵トルクTと電流指令値のコラム軸換算トルクTec(Tec=I×Kt ×G)との和P(P=T+Tec)を演算(P11、12)、値Pがコラム軸換算摩擦トルクTfc未満(P<Tfc)か否かを判定し、(P<Tfc)の場合はモータ電流零と見なせる状態が検出されたものと判定、その時点で検出されたモータ電流検出値iをオフセット補正値としてオフセット誤差の補正演算を行う(P13、15)。値Pがコラム軸換算摩擦トルクTfc未満(P<Tfc)でない場合はオフセット誤差の補正演算を中止する(P16)。
(もっと読む)
電動パワーステアリング装置および設定方法
【課題】トルク計などの計測器を用いることなく、装置全体での製造ばらつきなどを考慮して左右の操舵特性をバランスさせることができる技術を提供する。
【解決手段】同軸的に配置された2つの回転軸の相対回転角度に応じた電気信号を出力する相対角度検出装置と、2つの回転軸のいずれか一方の回転軸に駆動力を付与する電動モータと、相対角度検出装置からの出力値と記憶領域に記憶された補正値とに基づいて操舵トルクを検出するトルク検出部と、補正値を設定する中立補正値設定部と、を備え、中立補正値設定部は、電動モータが右方向に予め定められた所定回転速度で回転したときの相対角度検出装置からの出力値である右側出力値と、電動モータが左方向に所定回転速度で回転したときの相対角度検出装置からの出力値である左側出力値とに基づいて補正値を設定する。
(もっと読む)
電動パワーステアリング装置
【課題】構造を複雑にすることなく耳障りな歯打ち音等の発生を抑制する技術を提供する。
【解決手段】ステアリングホイールに操舵補助力を与える電動モータと、電動モータの回転駆動力が伝達されるウォームギアと、前輪を転舵させるラック軸を移動させるピニオンシャフトと、ピニオンシャフトと同軸的に連結された下部連結シャフトとの相対回転角度を検出する相対角度検出装置と、ウォームギアと噛み合うことにより電動モータの回転駆動力をピニオンシャフトに伝達するウォームホイールと、相対角度検出装置が検出した相対回転角度に基づいて電動モータの駆動を制御する制御装置と、を備え、制御装置は、前輪側から外力を受けて相対回転角度が周期的に変化する場合に、ウォームホイールの歯が動く方向と同じ方向にウォームギアの歯が動くように電動モータの駆動を制御する。
(もっと読む)
後輪トー角制御装置
【課題】左右の後輪のトー角を個々に制御する後輪トー角制御装置において、左右の後輪にコーナリングフォースの偏差が生じた場合にも車両の直進安定性を維持できるようにする。
【解決手段】後輪トー角制御装置10を、車両前後方向の加速度に基づいて左右の後輪5のトー角を共にトーイン若しくは共にトーアウトに制御するECU12と、左右の後輪5のコーナリングフォースを検出するための後輪空気圧センサ13とを備えるものとし、ECU12を、コーナリングパワー判定部26により左右の後輪5にコーナリングパワーの偏差が検出された場合、コーナリングフォース補正量算出部27により算出されたコーナリングフォース補正量(偏差)を低減するように、目標トー角補正部29により左右の後輪5のうち少なくとも一方の目標トー角θtを補正するように構成する。
(もっと読む)
車両運動制御装置及びプログラム
【課題】ドライバの視線と走行路との交点に到達するまでの時間が小さい状況における車両軌跡追従特性のダンピンの悪化を改善し、軌跡追従特性に優れた車両運動を実現する。
【解決手段】注視時間算出部30で、内向きカメラ12で撮像されたドライバの顔画像、外向きカメラ14で撮像された車両前方画像、及び車速センサ16で検出された車速Vに基づいて、注視時間Tを算出し、注視時間判定部32で、注視時間Tが予め定めた閾値Tthより小さいか否かを判定し、T<Tthの場合には、ダンピング変更部36で、ヨー角検出部34で検出された自車両のヨー角θと目標軌跡のヨー角θdとの差と、予め定めたダンピング特性とフィードバックゲインkp1との関係を示すテーブルに基づいて取得された必要なダンピング特性を得るためのkp1との積で表される偏差フィードバックδf_addを算出し、前輪舵角装置20へ出力する。
(もっと読む)
電動パワーステアリング装置
【課題】遅れなく振動を抑制することができ、操舵フィーリングの優れた電動パワーステアリング装置を提供する。
【解決手段】ECU23は、モータ制御信号を出力するマイコン41と、そのモータ制御信号に基づいてモータ21に駆動電力を供給する駆動回路42とを備えた。マイコン41は、電流偏差ΔIにF/BゲインKを乗ずることにより電圧指令値V*を演算するF/B制御部57と、電圧指令値V*に基づいてモータ制御信号を生成するPWM変換部58とを有するモータ制御信号出力部44を備えた。そして、モータ制御信号出力部44に、車両が直進状態である場合にF/BゲインKの値を低応答値に変更するF/Bゲイン演算部61を設けた。
(もっと読む)
角度検出装置、操舵装置、作業車両、および角度検出方法
【課題】角検出精度を向上させることができる角度検出装置および角度検出方法の提供。
【解決手段】互いに位相差を有するsin信号およびcos信号を出力する角度センサと、sin、cos信号の信号変化率に基づいて、sin、cos信号の一方を選択して角度検出に用いる制御部と、を備え、制御部は、第1、第2信号の一方の信号変化率(電圧勾配)が他方の信号変化率(電圧勾配)よりも小さくなる場合に、選択される信号を前記一方から前記他方へと切り替える。このように2つの信号を選択的に用いることで、変曲点に近く分解能が悪い領域の信号値が角度検出に用いられることが回避されるので、角検出精度を向上させることができる。信号変化率の大小は、sin、cos信号の電圧に基づいて判断することができる。
(もっと読む)
電動パワーステアリング装置
【課題】ステアリング機構が操舵限界(端当て)に達したことを、電流指令値の変化率又は位相進み値に基づいて判定し、操舵補助力を供給する電動モータの駆動力を制限して端当て時の衝撃を低減した電動パワーステアリング装置を提供する。
【解決手段】操舵トルクTと車速Vに基づいて演算された電流指令値Iref はモータ制御部20に出力され、電動モータ30を駆動するパルス幅変調信号のデューテイ比Dが演算される。電流指令値変化率演算部25は電流指令値Iref の変化率を示す微分値を演算し、閾値メモリ26bの閾値と比較される。閾値を越えていない場合は演算されたデューテイ比DVNが選択され、閾値を越えている場合は制限デューテイ比DVLが選択され、インバータ24を介して電動モータ30が駆動される。フイルタにより位相のみを進ませた電流指令値と閾値と比較、上と同様にデューテイ比DVN/DVLを選択することもできる。
(もっと読む)
操舵力制御装置
【課題】最小限の構成による簡素な構成で、車両姿勢が不安定となったときに適切に操舵補助力を付加し、ステアリング操作による車両の姿勢の安定化を促進させることのできる操舵力制御装置を提供すること。
【解決手段】電動パワーステアリングを備えた車両において、前輪の左右車輪速差、または後輪の左右車輪速差が所定車輪速差αより大、または当該左右車輪速差の変化率が所定変化率βより大であるような場合に、所定時間の間低車輪速側に操舵補助力を付加する。
(もっと読む)
121 - 140 / 1,615
[ Back to top ]