
Fターム[5F031FA02]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送の形態 (16,275) | ウエハ以外の基板(ダミーも含む)の移送 (1,711)
Fターム[5F031FA02]に分類される特許
21 - 40 / 1,711
薄板状ワーク搬送装置及び薄板状ワーク搬送方法
【課題】高速の薄板状ワーク搬送を安定して行うことができ、薄板状ワークがより薄くなった場合であったとしても、薄板状ワークの反りによる影響を受けることなく安定して搬送することが可能である薄板状ワーク搬送装置及び薄板状ワーク搬送方法を提供する。
【解決手段】ガラス基板Wの下面に空気を吹き付けて非接触状態で支持するエア浮上ユニット2と、ガラス基板Wの下面に接触してワーク搬送方向の移動力を付与する搬送ローラ37と、ガラス基板Wの搬送ローラ37との接触部位Wtを搬送ローラ37側に引き寄せる吸引手段4を備え、ガラス基板Wの上面に向けて空気を噴出させて、ガラス基板Wを搬送ローラ37に押し付けるエア押し付けユニット5を設けた。
(もっと読む)
移動装置

【課題】移動時のエア消費量を抑え、安定して移動できる移動装置を提供する。
【解決手段】移動装置1は、ガイドレール3と、移動部材10とを備える。ガイドレール3は、上面3Uと、上面3Uと反対側の下面3Lとを含む。移動部材10は、ガイドレール3に沿って移動可能である。移動部材10の第1対向面は、上面3Uと対向して配置され、ガスを噴出する複数の開口が形成される。第2対向面は、下面3Lと対向して配置され、ガスを噴出する複数の開口が形成される。
(もっと読む)
チャック装置
【課題】ワークの板厚が薄く形成されたとしても、簡易な構成で、ワークの利用部位を非接触状態に維持したまま安定してチャックできる。
【解決手段】チャック装置1は、ワークWと対向する本体2と、本体に配され、ワークと接触する突出部3と、本体と突出部とワークとで囲繞される囲繞空間Nから気体を吸引する吸引手段5と、ワークまでの相対距離dを測定する測定センサ6と、相対距離に基づいて、相対距離が所定の目標値で安定化するように吸引手段の吸引力を制御する吸引制御部7と、を備える。
(もっと読む)
チャック装置
【課題】可撓性を有するワークを非接触で安定的にチャックすることができるチャック装置を提供する。
【解決手段】可撓性を有するワークWを保持するチャック装置1であって、本体フレーム2と、本体フレーム2に設けられ、吸引力を作用させる吸引穴6をワークW表面に対向させて位置するとともに、吸引穴6の吸引力によってワークWを非接触状態で吸引する複数のベルヌーイチャック機構4、4’と、ベルヌーイチャック機構4’に設けられ、吸引穴6’の角度を可変して当該吸引穴6’とワークW表面との対向方向を変位させる揺動機構10と、を備える。
(もっと読む)
プロキシミティ露光装置、プロキシミティ露光装置の基板温度調節方法、及び表示用パネル基板の製造方法
【課題】複数の構成部材により構成される大型のチャックを用い、大型の基板の温度を均一に精度良く調節して、露光精度を向上させる。
【解決手段】チャック10にほぼ同じ大きさの複数の温度調節領域を設け、チャック10を温度調節領域と異なる形状の複数の構成部材10a,10b,10cにより構成する。チャック10の各温度調節領域に、熱媒体が流れる熱媒体通路11a,11b,11cをそれぞれ独立して設け、チャック10を構成する構成部材10a,10b,10cの境界に位置する温度調節領域の熱媒体通路11b,11cを、隣接する構成部材にまたがって配置する。チャック10の各温度調節領域の温度を別々の温度センサー12で検出し、各温度センサー12の検出結果に基づいてそれぞれ独立に温度を調節した熱媒体を、チャック10の各温度調節領域の熱媒体通路11a,11b,11cへそれぞれ独立して供給する。
(もっと読む)
チャック装置およびチャック方法
【課題】可撓性を有するワークを非接触で安定的にチャックすることができるチャック装置およびチャック方法を提供する。
【解決手段】可撓性を有するワークWを保持するチャック装置であって、ワークWの鉛直上方に位置して当該ワークWを非接触状態で吸引するベルヌーイチャック機構4と、当該ベルヌーイチャック機構4を挟んで水平面上に対向配置され、当該ベルヌーイチャック機構4による吸引力で浮上するとともに自重で撓んだワークWの側縁W2を挟持し、当該側縁W2よりも中央部W1が鉛直上方に位置する湾曲姿勢にワークWを保持する一対の保持手段10と、を備える。
(もっと読む)
塗布処理装置
【課題】処理動作のタクトタイムを短縮することができ、且つ、ノズルのメンテナンス処理に起因する被処理基板の汚染を防止する。
【解決手段】被処理基板Gの幅方向に延びる吐出口を有し、前記処理ステージ上の前記基板の上方を基板搬送方向に沿って移動されると共に、前記吐出口から前記基板上に処理液を吐出するノズル31と、前記ノズルを昇降移動可能であって、前記ノズルを基板搬送方向上流側または下流側に向けて移動可能なノズル移動手段32と、基板搬送路4の下方に設けられ、前記ノズルの吐出口の状態を整えるノズルメンテナンス手段35と、前記基板搬送路において前記処理ステージの上流側または下流側に所定長さの空き区間dを出没自在に形成可能な空き区間形成手段21,22,23A、23B、30とを備える。
(もっと読む)
テープ貼着装置
【課題】基板サイズに合わせてテープを切断するとともに基板に粘着テープを自動貼着できるテープ貼着装置を提供する。
【解決手段】テープ貼着装置2であって、カセット載置台6に載置されたカセット8から搬出入手段10で搬出された矩形基板を仮保持し反転手段24により180度反転可能な反転テーブル20を備えた仮保持手段と、該仮保持手段の直下に位置付けられて180度反転された反転テーブル20から矩形基板を受け取り矩形基板を保持する保持テーブル28と、保持テーブル28と該仮保持手段とを鉛直方向に相対移動させて該仮保持手段で仮保持した矩形基板を保持テーブル28に受け渡し可能とする鉛直方向移動手段と、保持テーブル28を該仮保持手段の直下である基板受け渡し位置と該保持テーブルで保持した矩形基板にテープを貼着する貼着位置との間で移動させる保持テーブル移動手段42と、該貼着位置に配設されたテープ貼着機構46とを備えた。
(もっと読む)
基板の搬送システム
【課題】水平方向へのレイアウトの拡大を抑制できる基板の搬送システムを提供する。
【解決手段】搬送システム1は、ロボット7Aにて搬入及び搬出される基板Sが置かれる搬入用スペース12A及び搬出用スペース13Aが上下方向に配置された受け渡しステーション9Aと、ロボット7Bにて搬入及び搬出される基板Sが置かれる搬入用スペース12B及び搬出用スペース13Bが上下方向に配置された受け渡しステーション9Bと、露光前の基板Sを各搬入用スペースへ移送する移送ロボット10Aと、搬出用スペース13Bの基板Sを下流側セクションSC2へ移送する移送ロボット10Bとを備え、移送ロボット10Aは搬出用スペース13Aの基板Sを第2受け渡しステーション9Bに配置された中継スペース14へ移送し、移送ロボット10Bは中継スペース14の基板Sを下流側セクションSC2に移送する。
(もっと読む)
基板検査装置、基板搬送方法
【課題】基板検査を短いタクトタイムで行うことができる基板検査装置および基板搬送方法を提供する。
【解決手段】本発明の基板検査装置1は、検査する基板を搬入する基板搬入部3と、基板を検査する基板検査部4と、検査が終了した基板を搬出する基板搬出部5とを有し、さらに気体を吐出することによって前記基板を浮上させる浮上プレート20と、基板搬入部3に搬入され、浮上プレート20により浮上した基板を保持し、個別の搬送軸上を個別に移動して搬送する基板搬送部6,7と、基板を保持した基板搬送部6、7が、基板搬入部3と、基板検査部4と、基板搬出部5とに分割された各ブロックに重複して位置しないよう制御する制御部10と、を備える。
(もっと読む)
薄膜製造装置及び薄膜製造方法、並びに薄膜製造装置のメンテナンス方法
【課題】突発故障が発生しても、生産性の高い成膜を行うことのできる薄膜製造装置及び薄膜製造方法、並びに薄膜製造装置のメンテナンス方法を提供することである。
【解決手段】成膜室を有し当該成膜室内で基体に薄膜を成膜する成膜チャンバーの集合である成膜チャンバー群42と、基体を搬送可能な移動チャンバー6と、基体を仮置き可能な基体仮置き装置を3基以上有し、前記移動装置はいずれの成膜チャンバーに対しても基体の受け渡しが可能であり、且つ前記移動装置は前記3基以上の基体仮置き装置に対して基体の受け取りまたは払い出しの少なくともいずれかが可能である薄膜製造装置を提供する。
(もっと読む)
基板のアラインメント方法及び装置
【課題】基板の位置調整に伴う傷の発生を防止できる基板のアラインメント方法及び装置を提供する。
【解決手段】本発明のアラインメント方法は、複数のフリーボールベアリング15で基板Sを裏面側から支持し、複数のフリーボールベアリングで支持された基板Sの縁部eに対して接触部材28を押し当てて基板Sを目標位置に動かす工程(d)を含む。
(もっと読む)
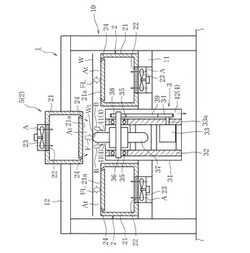
位置決め装置
【課題】回動駆動機構を設けることなく水平方向に対する移動体の移動量差に応じた回転角度で回転させて位置決めすることができ、装置自体を小型化及び軽量化する。
【解決手段】各電動モータを同期駆動してそれぞれの送りねじ9、11を所要の方向へ回転することにより各水平可動体17、19を一致する送り量で水平方向へ移動させ、水平方向に対する各水平可動体17,19の移動量の差に応じて一対のアーム37,41を平行揺動して取り付け部材35を回転して被位置決め手段を位置決めする。
(もっと読む)
搬送システム
【課題】 収納ケースから基板を受取って搬送し、且つ位置決めすることができる搬送システムを提供する。
【解決手段】 搬送システム1は、収納ケース12と、昇降装置13と、受渡装置14と、搬送装置15とを備えている。昇降装置13は、収納ケース12を昇降させてその中の各基板11を順に受取位置に位置させる。受渡装置14は、受取位置の基板11を受取って受渡位置にて搬送装置15に渡す。搬送装置15は一対のベルト51,51を有している。一対のベルト51,51は、左右方向に間隔をあけて設けられ、そこには複数のプロファイル54が互いに対応付けて夫々設けられている。対応付けられたプロファイル54は、搬送方向に一緒に移動し、また受渡位置にて渡された基板11の外縁部を支持し且つその基板11を規定位置へと位置決めするよう構成されている。
(もっと読む)
大型前面開閉一体型ウェハポッド
【課題】複数の支持片が配置された前面開閉一体型ポッド(FOUP)を提供する。
【解決手段】本FOUPの複数の支持片の位置は、該支持片がポッド内のウェハを水平に支持するよう対称になるように較正される。また、天井吊下式搬送パッド(OHTパッド)がFOUPとウェハとの重量を均一に分配するので、OHTヘッドによるFOUPとウェハの搬送を更に安定化でき、プロセスの要求を満たすようより多くの重量を装填できる。
(もっと読む)
基板処理システム、基板搬送方法、プログラム及びコンピュータ記憶媒体
【課題】基板処理システムのフットプリントを小さくする。
【解決手段】複数の処理ユニットが上下方向に多段に設けられた処理ステーション3と、複数枚のウェハWを収容するカセットを載置するカセット載置台12と、処理ステーション3とカセット載置台12との間に配置されたウェハ搬送機構21と、を備えた基板処理システム1において、処理ステーション3とウェハ搬送機構21との間には、カセット載置台12と処理ステーション3との間で搬送されるウェハ、及び各処理ユニットの各段の間で搬送される基板を一時的に収容する複数の受け渡しユニットが多段に設けられた受け渡しブロック22が配置されている。ウェハ搬送機構21は、カセット載置台12と受け渡しブロック22との間でウェハを搬送する第1の搬送アームと、受け渡しユニットの各段の間でウェハを搬送する第2の搬送アームとを備えている。
(もっと読む)
基板処理装置
【課題】複数の大きさの基板を処理可能な基板処理装置を提供すること。
【解決手段】基板処理装置は、任意の大きさの基板Wを水平に支持するセンターチャック13と、上向きの環状面57をそれぞれ有する複数のリング5とを含む。複数のリング5は、環状面57の内周縁の長さがそれぞれ異なる複数のサイズ調整リングを含み、内周縁がセンターチャック13に支持されている基板Wの周縁部に近接した状態で、環状面57が基板Wを水平に取り囲むように、複数のリング5のいずれか一つが、センターチャック13に支持されている基板Wの周囲に配置される。
(もっと読む)
塗布装置
【課題】 重量が大きく反りが大きい基板に対して塗布液を塗布する場合においても、装置コストを増大させることなく、短い処理時間で精度よく塗布液を塗布することが可能な塗布装置を提供する。
【解決手段】 基板は、基板搬送機構14によりステージ12上に搬送されて、その保持面30に吸着保持される。そして、ステージ12上に吸着保持された基板の表面に、スリットノズル41における塗布液吐出用スリットを近接させた状態で、スリットノズル41を基板に対して移動させることにより、基板の表面に塗布液を塗布する。しかる後、塗布液が塗布された基板は、基板搬送機構15によりステージ上から搬出される。
(もっと読む)
基板搬送用ハンドおよび基板搬送ロボット
【課題】製造コストの削減および軽量化を図るとともに複数枚の基板を同時に搬送することができること。
【解決手段】基板搬送用ハンドは、第1の載置部と、第2の載置部とを備える。第1の載置部は、所定の高さの載置面にて基板を支える複数の支持部を含み、第2の載置部は、第1の載置部の載置面の高さよりも上方の載置面にて基板を支える複数の支持部を含み、該支持部のうち1または複数は退避可能である。第1の載置部に基板を載置し、さらに、第2の載置部に別の基板を載置するよう基板搬送用ハンドを構成する。
(もっと読む)
基板搬入出装置
【課題】収納棚を保持台に位置決めするための位置決め個所を少なくして、収納棚を保持する保持台との合計質量を軽減でき、その昇降手段の大型化を防ぐことができる基板搬入出装置を提供する。
【解決手段】基板搬入出装置1は、下面に枠体2aを持つ収納棚2と、この収納棚2を移載台5の周囲に保持する保持台6とを備え、枠体2aの交差する二辺それぞれに位置して対となる位置決めローラ12bを配置し、これら位置決めローラ12bを位置決めローラ相対離合手段8により相対離合可能に構成し、相対離合する位置決めローラ12bにより枠体2aを挟むように構成している。この構成により、収納棚2が保持台6に載置されると、位置決めローラ12bが枠体2aを挟む方向に相対移動して、各位置決めローラ12bの中間位置に位置決めすることができる。
(もっと読む)
21 - 40 / 1,711
[ Back to top ]