
Fターム[5F031LA13]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 動作機構等 (3,476) | 動力伝達機構 (1,599) | ベルト、チェーン (344)
Fターム[5F031LA13]に分類される特許
81 - 100 / 344
基板昇降移送装置及び基板処理移送システム
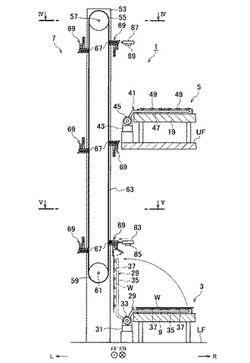
【課題】基板昇降移送装置7の平面スペースを十分に削減して、工場のスペースの有効利用を図ること。
【解決手段】第1基板処理装置3の一側に第1姿勢切替用保持具37を備えた第1姿勢切替部材29が水平な軸心周りに揺動可能に設けられ、第2基板処理装置5の一側に第2姿勢切替用保持具49を備えた第2姿勢切替部材41が水平な軸心周りに揺動可能に設けられ、第1姿勢切替部材29の一側に立設した支持フレーム53に上下方向へ延びた無端状部材63が循環走行可能に設けられ、無端状部材63に複数の昇降用保持具69が周方向に間隔を置いて設けられたこと。
(もっと読む)
ウェーハ検出機構、及びFOUP

【課題】FOUPの蓋部を開けることなくFOUP内のウェーハに対する検出処理を適切に行うことができるとともに、ウェーハの損傷を防止しつつ構造の簡素化を図ることが可能なウェーハ検出機構を提供する。
【解決手段】開閉可能な蓋部12を有するFOUP1の内部に高さ方向へ複数段に亘って収容したウェーハWに対して検出を行うウェーハ検出機構Xを、蓋部12に設けた各ウェーハWのエッジを保持し得るリテーナ12Bと、リテーナ12Bの弾性変形又は移動を検出することでウェーハWの少なくとも有無を検出する検出部Sとによって構成した。
(もっと読む)
基板搬送装置
【課題】基板処理を効率的に行い、スループットを向上する。
【解決手段】一対の回転軸2,3と、前記一の回転軸において所定間隔を空けて軸周りに回動自在に設けられた一対の第一滑車部材4と、前記他の回転軸において所定間隔を空けて軸周りに回動自在に設けられた一対の第二滑車部材5と、基板搬送方向に相対向する前記第一滑車部材と第二滑車部材との間に掛け回され、前記第一滑車部材及び第二滑車部材の回転により基板搬送路の左右両側において周回軌道に沿って移動自在に設けられ、前記被処理基板の左右両縁部がそれぞれ載置される一対の第一無端駆動部材6,7と、前記一対の第一無端駆動部材間に並列して架設され、前記被処理基板の中央部を支持する複数の線状部材8と、前記回転軸を軸周りに回転させる駆動部14と、基板搬送路に設けられ、複数の基板支持部材26により前記被処理基板を所定位置に支持する基板受け渡し機構20とを備える。
(もっと読む)
ロボットハンド及び移送ロボット
【課題】ハンド本体に対して移動可能な可動部としての可動フレーム、第2取付アーム、及び複数の第2クランパに作用する慣性力を相殺して、基板の実際のテンションの増大及び変動を十分に抑えること。
【解決手段】ハンド本体9の他端側に一対のカウンタウェイト33A,33Bがハンド長さ方向Lへ移動可能に設けられ、各第1滑車35A(35B)にカウンタウェイト33A(33B)と可動フレーム19を連結する第1連結ワイヤ39A(39B)が支持され、各第2滑車41A(41B)にカウンタウェイト33A(33B)と可動フレーム19を連結する第2連結ワイヤ45A(45B)が支持されていること。
(もっと読む)
搬送装置
【課題】搬送対象物を高い位置精度で搬送することが可能な搬送装置を提供する。
【解決手段】搬送装置1000は、ベース部4と、第1アームレバー5と、第2アームレバー6と、保持部7とを有する。第2アームレバー6と保持部7との間の関節部67には、第2アームレバー6に対して保持部7を3自由度で動かすことが可能なアクチュエータ100が設けられている。例えば、搬送装置1000は、アクチュエータ100を駆動させることにより、基板Wを、水平を維持したまま搬送することが可能である。このため、基板Wの位置精度を確保することができる。
(もっと読む)
基板搬送装置
【課題】構造を簡易にでき、占有面積を小さくできる枚葉式の基板搬送装置を提供すること。
【解決手段】枚葉式の基板搬送装置5は、第1枚葉ハンド45、第2枚葉ハンド46、第1進退機構、第2進退機構、一体移動機構、相対移動機構、および枚葉ハンド移動機構を備えている。第1進退機構は、第1水平方向D1に向かって第1枚葉ハンド45を進退させることができ、第2進退機構は、第1水平方向D1と正反対の第2水平方向D2に向かって第2枚葉ハンド46を進退させることができる。一体移動機構は、第1および第2枚葉ハンド45,46を鉛直方向に一体移動させることができ、相対移動機構は、第1および第2枚葉ハンド45,46を鉛直方向に相対移動させることができる。枚葉ハンド移動機構は、第1および第2枚葉ハンド45,46をX方向に一体移動させることができる。
(もっと読む)
基板搬送装置
【課題】基板搬送装置において、安定した平流し搬送を行うことができ、且つ、基板処理を効率的に行う。
【解決手段】被処理基板Gを平流し搬送する基板搬送装置1であって、水平方向に軸架され、且つ平行に配置された一対の回転軸2,3と、前記一の回転軸において所定間隔を空けて軸周りに回動自在に設けられた一対の第一滑車部材4と、前記他の回転軸において所定間隔を空けて軸周りに回動自在に設けられた一対の第二滑車部材5と、基板搬送方向に相対向する前記第一滑車部材と第二滑車部材との間に掛け回され、前記第一滑車部材及び第二滑車部材の回転により基板搬送路の左右両側において周回軌道に沿って移動自在に設けられた一対の第一無端駆動部材6,7と、前記一対の第一無端駆動部材間に、上方に弓形に曲がった状態で並列して架設され、弾性を有する複数の線状部材8と、前記回転軸を軸周りに回転させる駆動部14とを備える。
(もっと読む)
基板処理装置
【課題】複数枚の基板の一括搬送および1枚の基板の枚葉搬送の切り換えに要する時間を短縮することができる基板処理装置を提供すること。
【解決手段】基板処理装置は、バッチハンド24によりフープ保持部に保持されたフープに対して複数枚の基板Wを一括して搬入および搬出するバッチ式の第1搬出入機構4と、第1および第2枚葉ハンド45,46によりそれぞれバッチハンド24およびフープに対して1枚の基板Wを搬入および搬出する枚葉式の第2搬出入機構5とを含む。
(もっと読む)
基板処理装置及び基板処理方法
【課題】平流しの搬送ライン上で被処理基板に供給した第1の処理液を分別回収して第2の処理液に置き換える動作を効率よくスムースに行い、現像斑の発生を抑制する。
【解決手段】被処理基板Gを平流し搬送する基板搬送路2と、前記基板搬送路を搬送される被処理基板に第1の処理液を供給する第1の処理液供給手段9と、前記基板搬送路を搬送され、前記第1の処理液が供給された前記被処理基板に対し、所定のガス流を鉛直方向乃至搬送方向下流側のいずれかに向けて吹き付ける気体供給手段21と、前記気体供給手段によりガス流が吹き付けられ、前記基板搬送路を搬送される前記被処理基板に対し、所定の流速で第2の処理液を供給する第1のリンス手段22と、前記第2の処理液が供給され、前記基板搬送路を搬送される前記被処理基板に対し、前記第1のリンス液供給手段よりも高流速で前記第2の処理液を供給する第2のリンス手段23とを備える。
(もっと読む)
基板処理装置
【課題】複数枚の基板を収容した搬送容器が載置されるロードポートと、搬送容器を保管する容器保管部と、を備えた基板処理装置において、ロードポートにおける搬送容器の受け渡し回数の増大を図ることができ、これにより基板を高いスループットで処理することのできる基板処理装置を提供する。
【解決手段】横方向の位置が互いに異なる第1の搬送路102A及び第2の搬送路102Bの各々に沿って、複数枚の基板を収容した搬送容器10を搬送する第1の搬送装置104A及び第2の搬送装置104Bを利用し、第1の搬送装置104Aにより搬送容器10の受け渡しが行われる第1のロードポート21と、この第1のロードポート21に対して階段状に設けられ、前記第2の搬送装置104Bにより搬送容器10の受け渡しが行われる第2のロードポート22とを備えている。
(もっと読む)
搬送物品の一時保管装置
【課題】設置場所の省スペースを図るとともに、設備コストを低減し、好ましくは安全性を高めることができるようにした搬送物品の一時保管装置を提供する。
【解決手段】物品Aの搬送手段27が設けられた複数の棚20を上下に有する保管部10と、この保管部10を昇降可能とし、かつ前記保管部10のうちの選択された所定の棚20を搬送経路1と同じ高さに位置させる昇降手段15とを備えるとともに、前記搬送経路1の搬送手段5,6,7と前記所定の棚20の搬送手段27とを同期させることにより、前記搬送経路1から搬送される物品Aを、前記所定の棚20上に向けて搬入するか、または前記所定の棚20上の物品を、前記搬送経路1上に向けて搬出しうるようにする。
(もっと読む)
産業用ロボット
【課題】基板が搭載される複数の搭載部間のピッチを変えるピッチ変更機構を備えている場合であっても、小型化することが可能な産業用ロボットを提供すること。
【解決手段】産業用ロボットを構成する基板搭載機構3は、上下方向に重なるように配置され基板が搭載される搭載部13〜17間のピッチを変えるピッチ変更機構26と、上下方向に移動可能な複数の可動ハンド18〜21とを備えている。ピッチ変更機構26は、Y方向を軸方向として配置される支点軸に回動可能に支持され可動ハンド18〜21が連結されるレバー部材52、53と、レバー部材52、53を回動させる駆動機構58とを備え、可動ハンド18〜21とレバー部材52、53との連結部となるハンド連結部は、レバー部材52、53に取り付けられY方向に突出する突出部材と、可動ハンド18〜21に取り付けられ突出部材が係合する係合溝が形成されるガイド部材とを備えている。
(もっと読む)
テストハンドラー
【課題】顧客トレイからテストトレイに半導体素子をローディングする時、段階的に行われる半導体素子の前後及び左右ピッチの調整を分業化することができる技術を提供する。
【解決手段】本発明のテストハンドラーは、半導体素子をマトリックス状に第1方向ピッチと第2方向ピッチを有するように積載可能な顧客トレイと、前記顧客トレイに積載されている半導体素子をテストトレイにローディングするローディング装置と、前記ローディング装置によりローディングが終了されたテストトレイ上の半導体素子をテストするために設けられるテストチャンバーと、前記テストチャンバーを経由してテストが終了されたテストトレイ上の半導体素子を顧客トレイにアンローディングするアンローディング装置と、を備える。
(もっと読む)
ステージ装置
【課題】ワークが保持されるステージが上下方向、水平方向さらに回転方向へ駆動する機能を有し、高さ方向と長さ方向において寸法が小さく、コンパクトなステージ装置を提供する。
【解決手段】スライダ15は左右1つずつ設けられているだけなので、ガイドレール5の長さ寸法を短いものにすることができる。昇降用モーター21はボールネジシャフト17の側方に備えられ、昇降用モーター21の駆動力がプーリー23、タイミングベルト25、プーリー19を介してボールネジシャフト17に伝達されるようになっているので、ステージ装置1の高さ方向と長さ方向において寸法が小さくすることが可能となっている。
(もっと読む)
ウェハのアライメント装置
【課題】ウェハ裏面のパーティクル付着が極めて少なく、アライメント時間が短いプリアライナを提供することを目的とする。
【解決手段】ウェハを保持して旋回させる機構が、ウェハが載置されるパッド5と、前記ウェハの側面を把持可能なクランプ14と、パッド5とクランプ14の両方を支持して回転する旋回ベース2と、を備え、クランプ14が、パッド5に載置されたウェハに対して、上昇位置でウェハの側面を把持し、下降位置でウェハの裏面よりも低い位置に移動するよう、旋回ベース2に対して昇降自在に支持されるよう構成した。
(もっと読む)
基板装填脱装方法および半導体装置の製造方法
【課題】キャリアの開放時における基板への自然酸化膜の堆積やパーティクルの付着、基板搬送室の汚染や酸素濃度の上昇等の弊害の発生を防止する。
【解決手段】ポッド10の収納室10cからウエハ9を取り出す際に、収納室10cの出し入れ口10bを塞ぐ蓋体10aを出し入れ口10bから移動させ、出し入れ口10bが開かれ、ポッド10と連設されたポッドオープナ室61を密封した状態で、ポッドオープナ室61へ不活性ガスを流し、収納室10cに不活性ガスを供給する。空のポッド10の収納室10cにウエハ9を収納する際に、空のポッド10の収納室10cにウエハ9を収納する前に、収納室10cの蓋体10aを出し入れ口10bから移動させて、出し入れ口10bを開き、ポッドオープナ室61を密封した状態で、ポッドオープナ室61に不活性ガスを流し、収納室10cに不活性ガスが供給する。
(もっと読む)
ロボットおよびロボットの電気エンドエフェクタに電気的に接続するシステム、装置、および方法
ロボット装置内で電気エンドエフェクタへの電気的接続を可能にするシステム、装置、および方法が開示される。一態様では、電気的結合は、真空チャンバ内で電気エンドエフェクタに電力を提供する。電気的結合は、係合する電気接点を含むことができる。いくつかの実施形態では、接点の少なくとも1つは、ロボットのアームの回転中に係合する接点が互いに対して回転しないように、ばねにつるすことができる。他の実施形態では、誘導結合されたコイルが含まれる。多数の他の態様が提供される。  (もっと読む)
(もっと読む)
基板搬送機構および基板処理装置
【課題】大型基板をより安定的に搬送する。
【解決手段】複数本の搬送ローラ30の駆動により基板Wを搬送する基板搬送機構。搬送ローラ30は、二本の単位ローラ軸31a,31bと、これら単位ローラ軸31a,31bに固定されて基板Wを支持するローラ本体32と、単位ローラ軸31a,31bが同軸上で一体に回転するように単位ローラ軸同士を中継する中継手段38と、を含む。中継手段38は、単位ローラ軸31a,31bの端部のうち一方側の端部に設けられる第1磁石部(磁気連結板38の磁石)と、他方側の端部に設けられる第2磁石部(磁気連結板38の磁石)と、これら磁石部が所定隙間を隔てて互いに対向して単位ローラ軸同士を連動させるように各単位ローラ軸31a,31bの端部位を回転可能に支持する中央支持板44等と、を含む。
(もっと読む)
基板処理システム
【課題】第1の基板搬送装置や第2の基板搬送装置が基板収容機構に効率的にアクセスすることができるようになり、このため単位時間あたりの基板の処理枚数を多くすることができる基板処理システムを提供する。
【解決手段】ウエハ収容部30において、複数のウエハWを上下方向に互いに離間させて収容するウエハ収容機構32が複数設けられており、各々のウエハ収容機構32は移動自在となっている。各ウエハ収容機構32は、第1のウエハ搬送装置50によりウエハWが搬送されたり取り出されたりする第1のウエハ受け渡し位置P、および第2のウエハ搬送装置60a、60b、60cによりウエハWが搬送されたり取り出されたりする第2のウエハ受け渡し位置Q、R、Sの間で駆動部34、35、36、38により移動させられるようになっている。
(もっと読む)
薄板の搬送面接触状態検出方法
【課題】事前の煩雑な準備を必要とせずに、搬送面から浮上させて搬送方向に搬送される薄板の搬送状態を、インラインにより検出すること。
【解決手段】浮上搬送装置10により搬送される薄板Wと搬送面Sとの空間を、搬送方向Xの全体に亘って1又は複数のレーザレーダヘッド3からの走査光Lによって走査し、走査光Lの光路上に存在する物体からの走査光Lの反射光Rによって、走査光Lの出力元のレーザレーダヘッド3からの、その物体の方向及び距離を特定する。そして、特定した方向及び距離によって、薄板Wの搬送面Sに対する接触箇所や搬送ユニット11の構成物の位置を特定する。そのうち、搬送中の薄板Wよりも手前か奥に配置されている搬送ユニット11の構成物の位置を検出対象から除外し、残る、薄板Wの搬送面Sに対する接触箇所の位置だけを最終的に検出する。
(もっと読む)
81 - 100 / 344
[ Back to top ]