
Fターム[5F031LA13]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 動作機構等 (3,476) | 動力伝達機構 (1,599) | ベルト、チェーン (344)
Fターム[5F031LA13]に分類される特許
41 - 60 / 344
薄板搬送装置
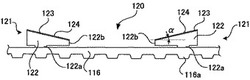
【課題】 反りを有する薄板であっても簡易な構成により確実に高速搬送することができる薄板搬送装置を提供する。
【解決手段】 搬送体116と、搬送体116に設けられた一対の突状体121と、搬送体116の駆動により一対の突状体121を水平搬送する駆動手段とを備え、一対の突状体121間に平板状の薄板が保持される薄板搬送装置であって、一対の突状体121は、搬送方向に沿って互いに対向する傾斜面124をそれぞれ備え、傾斜面124には、複数の係止微細突起が傾斜方向に鋸歯状に連設されており、一対の突状体121の係止微細突起が薄板の搬送方向両側端面にそれぞれ当接して薄板を保持するように構成されている。
(もっと読む)
搬送機構

【課題】アーム部自体の温度上昇を抑制して搬送精度を高く維持することが可能な搬送機構を提供する。
【解決手段】処理容器56内で被処理体Wに熱処理を施す処理装置に対して被処理体を搬出入させる搬送機構において、複数のアーム94、96、98を有して屈伸及び旋回が可能になされたアーム部36A、36Bと、アーム部の先端に連結されて被処理体を保持するフォーク部38A、38Bと、アーム部の内で処理容器内に侵入する部分に設けた熱遮蔽板104とを備える。これにより、アーム部自体の温度上昇を抑制して搬送精度を高く維持する。
(もっと読む)
基板搬送装置及び基板搬送方法
【課題】複数のローラを用い、ローラの基板への接触面積を増加させることなく、基板の搬送を安定して行う。
【解決手段】基板移動方向に所定の間隔で設けた複数の第1のローラ20に基板1を搭載し、複数の第1のローラ20を回転して、基板1を基板移動方向へ移動しながら、複数の第1のローラ20により移動される基板1の下面を複数の第2のローラ10で支持し、複数の第2のローラ10を、複数の第1のローラ20により移動される基板1と共に基板移動方向へ移動する。第1のローラ間で発生する基板1の変形が、第2のローラにより抑制され、第1のローラ及び第2のローラを合わせたローラの基板1への接触面積を増加させることなく、基板1の搬送が安定して行われる。
(もっと読む)
搬送装置
【課題】 ウエハを載置する位置やゲートの向きに係わらずウエハを略真直ぐ入れることができる搬送装置を提供する。
【解決手段】 搬送装置1は、旋回ベース13と、2つのハンド機構13,14と、2つのハンド用駆動機構30,40とを有する。2つのハンド機構13,14は、旋回ベース13に回動軸線L2,L3を中心に回動可能に夫々設けられ、ハンド駆動機構30,40により個別に回動動可能に構成されている。ハンド機構13,14は、アーム20と、ハンド21と、連動機構26とを有している。アーム21は、回動軸線L2,L3を中心に回動可能に前記旋回リンクに夫々設けられ、ハンド20は、ハンド用軸線L4,L5を中心に回動可能に前記アーム21に夫々設けられている。連動機構26は、アーム20に対する前記ハンド21の減速比が1.55でアーム20と前記ハンド21とを連動させるように構成されている。
(もっと読む)
薄膜形成装置システムおよび薄膜形成方法
【課題】基板の変形および熱割れを防止することができる、薄膜形成システムおよび薄膜形成方法を提供する。
【解決手段】処理室の一つであり、基板16を加熱する加熱装置、および、基板16と加熱装置とを相対的に移動させる駆動装置が配置された加熱室3と、処理室の一つであり、加熱された基板16に薄膜を形成するスパッタ装置26が配置されたZnOスパッタ室4と、駆動装置を操作する制御装置22とを備えている。駆動装置は、加熱室3からの基板16の搬送が不能となった際に、加熱室3内の基板16と加熱装置とを相対的に移動させ続けるように制御装置22により操作される。
(もっと読む)
プリアライナ装置およびそれを備えた搬送システム
【課題】主に、小径ウエハを確実にアライメントすることができること、ウエハを搬送してくるロボットハンドの形状に影響されることなくウエハの受け渡しが可能であることを課題とする。
【解決手段】リフト機構17のリフトピン18の上下動の動作が、ウエハ20の載置部11がX軸移動機構15とY軸移動機構14とによって動作する平面方向との移動動作とは無関係におこなわれるよう構成する。
(もっと読む)
自動順位付け多方向直列型処理装置
【課題】太陽電池製造システムに対する需要が増え続けるにつれ、直線システムのスループットの利点を得つつ、メインフレーム構成の柔軟性も提供する。
【解決手段】数枚の基板を同時に処理する装置及び方法が提供される。システムは、直線状でありつつ、処理を自律的に順位付けして基板を必要に応じて異なる方向に移動させる新規なアーキテクチャを採用している。システムは、数枚の基板を同時に移動させるが、従来技術とは異なりトレイを使用しない。
(もっと読む)
液滴吐出装置
【課題】UVインクを用いる場合に起因する不具合の発生を防止した液滴吐出装置を提供する。
【解決手段】基板に紫外線硬化型の液滴を吐出する液滴吐出ヘッド60と、液滴が吐出された基板に紫外線を照射するランプ部を有する紫外線処理ユニット7と、紫外線処理ユニット7における基板入口71a又は基板出口71aの開閉動作に対応させるようにランプ部のオンオフ動作を制御する制御部103と、を備えた液滴吐出装置3である。
(もっと読む)
ウェハのコンベヤ台
【課題】振動が発生しても、ウェハの移動や破損を回避して正確に検査をすること。
【解決手段】ウェハが載置されて当該ウェハを搬送方向に搬送する第1搬送ユニットと、ウェハが載置されて当該ウェハを搬送方向に搬送し、当該ウェハに対し載置された状態で検査が行われる第2搬送ユニットと、前記第1搬送ユニット及び前記第2搬送ユニットの間に設置され、ウェハを前記第1搬送ユニットから前記第2搬送ユニットまでフローティングしつつ受け渡すフローティング方式の搬送ユニットと、前記フローティング方式の搬送ユニットの搬送方向に沿った側辺に設置され、ウェハを搬送方向に案内する案内ユニットと、を備える。
(もっと読む)
基板の搬送装置
【課題】この発明は搬送される基板の端部をその厚さに係らず確実に保持できるようにした基板の搬送装置を提供することにある。
【解決手段】複数の搬送軸4に設けられた搬送ローラ5及び基板の幅方向両端部の下面を支持する端部支持ローラ5aと、搬送軸の上方に支持された上載せローラ軸16と、上載せローラ軸に設けられ端部支持ローラによって幅方向の端部下面が支持された基板の幅方向の端部上面を押圧する一対の上載せローラ25と、搬送軸の両端部に設けられ外周面が軸方向に対して傾斜した第1の傾斜面34に形成された第1の荷重調整ローラ31と、上載せローラ軸に設けられ外周面が第1の傾斜面と同じ角度で同じ方向に傾斜した第2の傾斜面35に形成されていて、第1の荷重調整ローラに対して軸方向に相対的に移動させて第1の傾斜面との接触度合を調整することで、上載せローラによる基板の端部上面を押圧する押圧力を設定する第2の荷重調整ローラ32を具備する。
(もっと読む)
ウェハ搬送検査機台及びウェハ搬送検査方法
【課題】ウェハ検査の精度を向上させること。
【解決手段】ウェハを載置して当該ウェハを搬送する第1搬送ユニットと、前記第1搬送ユニットに隣接し、前記第1搬送ユニットにより搬送されたウェハを受け取り、当該ウェハを載置して当該ウェハを搬送する第2搬送ユニットと、前記第2搬送ユニットの上のウェハを検査する検査ユニットと、前記検査ユニットに連結されて、前記検査ユニットを前記第2搬送ユニットの上で移動させる駆動装置と、を備え、前記第2搬送ユニットがウェハの搬送を一時的に停止したとき、前記駆動装置が前記検査ユニットを移動させつつ前記検査ユニットが前記第2搬送ユニットの上のウェハを検査する。
(もっと読む)
水平多関節ロボットおよびそれを備えた搬送装置
【課題】直動機構を用いることなくワークを出し入れすることができると共に、高速動作が可能で、かつ、低発塵、省スペース化に寄与する水平多関節ロボットおよびそれを備えた搬送装置を提供すること。
【解決手段】エンドエフェクタ20、第1アーム30、第2アーム40に、さらに第3アーム50を備え、第3アーム50を揺動回転動作させることによって、例えば、アクセス位置P1の軸線P1aの延長線上に第3回転軸N3がくるようにしてから直線状にエンドエフェクタ20を移動させてワークの出し入れを行う。
(もっと読む)
搬送装置
【課題】カセットの搬送過程においても、カセットの姿勢を正常な状態に維持することができる搬送装置を提供する。
【解決手段】搬送装置は、第1搬送台110および第2搬送台111と、カセット200の第1側面との間の距離を検知可能なセンサと、センサからの出力に基づいて第1ローラと第2ローラの回転速度を調整する制御部260とを備える。
(もっと読む)
z運動し、多関節アームを備える直線真空ロボット
【課題】小さい設置面積を維持すると共に、処理ステーション毎に個別に滞留時間を制御することができるコスト及びスループットを改善下装置及び方法を提供する。
【解決手段】線形搬送チャンバは、線形トラックと、線形トラックに乗せられて、処理チャンバの側面に沿って基板を線形に搬送するロボットアームとを含み、処理チャンバに到達させる方法として、基板を、制御された雰囲気中にロードロックを介してフィードし、次いで搬送チャンバに沿ってフィードする。線形平行移動、回転と分節、及びz運動が可能な4軸ロボットアームが開示される。
(もっと読む)
アーム機構およびそれを備えた真空ロボット
【課題】高剛性で耐熱性もある真空環境内に適した真空ロボットのアーム構成を提供すること。
【解決手段】内部に気密な空間を有するアームベース8と、アームベース8内に設置されたアーム駆動用モータ9と、アーム駆動用モータ9によって回転する中空の減速機シャフト31と、減速機シャフト31の回転が入力されて所定の比だけ減速し、減速機シャフト31の周囲で回転する第1減速機出力軸32と、からなり、アームベース8内に減速機シャフト31の下端が露出するよう設置された第1減速機10と、中空の減速機シャフト31の上端が侵入することでアームベース8の気密な空間と同圧となる気密な空間を有し、かつ第1減速機出力軸32に固定される第1アーム2と、第1アーム2の先端に設置され、入力軸が減速機シャフト31と接続された第2減速機15と、第2減速機15の出力軸に固定され、内部に気密な空間を有しない第2アームと、第1アーム2と第2アーム5とに追従するリンク機構と、を備えた。
(もっと読む)
基板処理装置
【課題】塗布処理の際に被処理基板上から蒸発するガスの回収を首尾よく行えるとともに、塗布処理空間の省スペース化、フットプリントの縮小、空気清浄の設備および消費エネルギーの節減を実現する。
【解決手段】レジスト塗布ユニット(COAT)44の塗布処理部84は、浮上ステージ96上で空中に浮いている基板Gをステージ長手方向に搬送しながら、長尺型のレジストノズル100よりレジスト液を帯状に吐出して、基板G上にレジスト液の塗布膜を形成する。レジストノズル100は、塗布処理室80の搬出口80bの近傍に配置される。レジスト塗布ユニット(COAT)44の塗布処理室80と気流乾燥ユニット(KD)46の乾燥処理室136とは両室の境界で隔壁138を共有しており、塗布処理室80の搬出口80bが乾燥処理室136の搬入口136aとなっている。
(もっと読む)
ハンドラのティーチング方法及びハンドラ
【課題】把持部材を半導体チップの上面に近づけたときに把持部材から噴出する気体の背圧が予め定めた圧力まで上昇しなくても把持部材が半導体チップの上面に接触する高さ位置を、簡単な構成で高精度に求めることのできるハンドラのティーチング方法及びハンドラを提供する。
【解決手段】吸着パッドを検査用ソケットに配置されたICチップに向かって下動させるとき、吸着パッドの先端から気体を噴出させながら下降させる。そして、吸着パッドの先端から噴出する気体の流量を流量センサで検出し、流量センサで検出した流量が予め定めた流量まで減少した時の吸着パッドの下降位置を吸着パッドがICチップの上面に接触する高さ位置として記憶手段に登録する。
(もっと読む)
クリーン化搬送システムにおけるワーク搬送装置
【課題】簡潔な搬送機構によって、必要かつ十分なピックアンドプレース動作を行う、小型化の容易なクリーン化搬送システムにおけるワーク搬送装置を提供する。
【解決手段】クリーン化された空間にてワークに対する必要な加工、処理を行うために上記空間に配置された装置類に対してワーク授受を行うクリーン化搬送システムにおいて、各工程の装置類にワークを搬送するワーク搬送機20を具備し、ワーク搬送機は機体21の両端に設けた1対の回転輪22、23と動索24とから成る搬送機構25を複数個並設した構成を有しており、1番目の動索と2番目の機体、2番目の動索と1番目の機体、2番目の動索と3番目の機体、3番目の動索と2番目の機体というように動索と機体を順次結合し、上記搬送機構の任意の段の動索にワークを保持する保持部材30を設ける。
(もっと読む)
半導体基板の分離処理装置および分離方法、半導体基板の分離機構および分離方法、半導体基板の搬送装置、ノズル
【課題】ウエット状態で密着した半導体基板同士を破損することなく自動的に、高速で分離することが可能な装置および方法を提供し、分離した半導体基板を破損することなく安全に搬送できる装置および方法を提供する。
【解決手段】ウエット状態で密着配列した複数の基板を液中に配置するローダー部10と、前記ローダー部10の最前列に配置されている基板2を液中で保持して液外のアンローダー部30に搬送する搬送部20と、基板2を液外で載置し取り出し部まで搬送するアンローダー部30とを有し、搬送部30は回転軸21に連結され所定半径の回転円運動を行う駆動部材22と、この駆動部材22に一端側が回動自在に固定されたリンクアーム210と、リンクアーム210の他端側が摺動しその軌道を規定する軌道路201と、リンクアーム210の他端側に固定されているチャック100とを有する構成の半導体基板の分離処理装置とした。
(もっと読む)
基板搬送装置及び液晶セル
【課題】パネル基板を複数のステージに順次搬送する際に、パネル基板を搬入・搬出する必要をなくし、搬送の効率化を図る。
【解決手段】液晶セル1を搬送する基板搬送コンベア30は、複数の搬送ベルト31からなり、液晶セル1の処理対象領域に最も近い位置に設けた搬送ベルト31Aには、下部位置には負圧配管41を接続した負圧チャンバ40が設けられており、この負圧チャンバ40は搬入ステージ10から本圧着ステージ13までの部位に及ぶ長さを有し、搬送ベルト31Aで覆われており、この搬送ベルト31Aには、所定のピッチ間隔をもって吸着孔42が穿設され、これら吸着孔42は搬送ベルト31Aの搬送面に開口しており、搬送ベルト31A上に液晶セル1が載置されると、この吸着孔42を介して液晶セル1に負圧吸着力が作用する。
(もっと読む)
41 - 60 / 344
[ Back to top ]