
Fターム[5H680DD02]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 移動子、振動子の構造 (8,146) | 移動子 (900) | 摩擦部材 (629)
Fターム[5H680DD02]に分類される特許
201 - 220 / 629
超音波モータ及びそれを備えた搬送装置
【課題】簡単な構成を有しながらも高いトルク効率を得ることのできる超音波モータ及びそれを備えた搬送装置を提供する。
【解決手段】超音波モータ1は、一面を有する固定部材30と、固定部材の一面に対向するように配置された移動部材20と、移動部材の少なくとも一部を固定部材の一面に接触させると共に、移動部材を固定部材に対して移動させるアクチュエータ27とを備える。
(もっと読む)
超音波モータおよび案内装置

【課題】 可動体を磨擦駆動させてもパーティクルの発生が少ない超音波モータおよび案内装置を提供する。
【解決手段】 振動体5と、振動体5の振動を相手部材に伝達する押圧部材6とを備えてなる超音波モータ1において、押圧部材6の少なくとも表面は、酸化アルミニウムが60質量%以上70質量%以下であり、かつ炭化チタンが30質量%以上40質量%以下の焼結体を有してなり、前記焼結体の切断面における少なくとも1本の10μm以上の直線上に存在する前記炭化チタンの結晶粒子の個数の比率は、前記直線上に存在する炭化チタンの結晶粒子の個数および酸化アルミニウムの結晶粒子の個数の合計に対して55%以上75%以下である。
(もっと読む)
駆動装置の駆動方法
【課題】移動部材の移動をスムーズに行わせること。
【解決手段】伸縮方向で互いに対向する一対の端面を持つ電気機械変換素子(13)と、この電気機械変換素子の一対の端面の一方(13b)に取り付けられた振動摩擦部(14)と、この振動摩擦部と摩擦結合される移動部材(121,122)と、電気機械変換素子(13)の一対の端面の一方(13b)と振動摩擦部(14)の端面との間に配置された振動伝達部材(19)とを備え、電気機械変換素子の伸縮方向に移動部材が移動可能な駆動装置(10)の駆動方法において、電気機械変換素子(13)を鋸歯状波に往復変位させ、この電気機械変換素子の往復変位を振動伝達部材(19)を介して振動摩擦部(14)に伝達させ、それによって、移動部材(121,122)を所定の方向にリニア駆動する。
(もっと読む)
振動型アクチュエータの製造方法
【課題】振動型アクチュエータの製造に際し、部品寸法がばらついても共振周波数のばらつきを抑え、安定した特性の得られる振動型アクチュエータの製造方法を提供する。
【解決手段】電気機械変換素子と軸状部材を接着する接着剤の特性を変更することにより、振動型アクチュエータの共振周波数を調定する振動型アクチュエータの製造方法とする。
(もっと読む)
超音波モータ
【課題】エンコーダなどのセンサを用いることなく、移動体の回転位置や回転速度の検出が可能なセルフセンシング方式の超音波モータにおいて、駆動性能の低下を抑える。
【解決手段】振動体(ステータ)は圧電素子12aの振動によって移動体(ロータ)を駆動し、その移動体に形成した溝を振動体の接触部が通過する際の検出電極ISからの出力変化で移動体の回転位置を検出するにあたって、振幅検出部28は検出電極ISからの出力振幅を検出し、偏差算出部29が、理想振幅値(最適駆動の振幅値)との偏差を演算し、その演算結果に応じて制御部24が駆動電圧発生部25の発振周波数を変化させる。したがって、溝の無い通常域の通過時には通常の共振周波数で振動させ、溝の有る検出域の通過時には振動周波数を低下させて共振周波数にマッチさせ、駆動性能(トルク)の低下を抑えることができる。回転位置は、位置検出部30が、駆動周波数の変化から検出する。
(もっと読む)
振動波モータ
【課題】突起の中で径方向の滑りを低減したい位置の振動の軌跡方向を、移動体の変位方向と略一致させ、摺動損失を低減することができる振動波モータを提供する。
【解決手段】振動波モータは、電気エネルギーを機械エネルギーに変換する変換素子(圧電素子1)に交流電圧を印加することによって、変換素子が結合される振動体2に進行性振動波を発生させ、進行性振動波により振動体2に接触する移動体3を摩擦駆動する。そして、振動体2は、変換素子が結合される基部2aと、基部2aに設けられ、移動体3と接触する接触面を有する突起2bとを備える。また、基部2aの移動体3との接触面側に設けられるとともに、突起2bと接続される支持部2cを備える。支持部2cは、振動体2の中心軸と突起2bの周方向の中心とから定められる面に対して、非対称の位置に形成されている。
(もっと読む)
駆動装置、およびこれを備えた撮像装置、電子機器
【課題】簡便な予圧機構を小スペースに設けることが可能であり、駆動部材と被駆動体との間で作用する摩擦力、および被駆動体の駆動速度が安定した駆動装置を提供する。
【解決手段】駆動装置は、一端部が筐体に固定されており、電気的制御により屈曲変位が生じる電気機械変換素子と、一端部が上記電気機械変換素子に連結されており、他端部が被駆動体と摩擦接触している摩擦部材と、一端部が上記被駆動体に保持されるとともに他端部が上記筐体に保持されており、上記被駆動体を上記摩擦部材と摩擦接触する方向へ付勢する予圧部材とを備えている。これにより、駆動装置の構造をより簡単に、かつ機能をより安定させることができる。例えば、本発明に係る駆動装置をカメラ等の撮像装置のレンズ駆動に用いた場合には、より小型化された、駆動速度がより均一で、かつピント調整の精度がより優れた製品を提供することができる。
(もっと読む)
駆動装置
【課題】駆動軸を挟み込むバネ性を有する摩擦部材を一部材で構成すると共に、摩擦部材への駆動軸の組み込み時における組み込みの容易化を図った駆動装置を提供する。
【解決手段】電圧を印加することにより伸縮動作する電気−機械変換素子4と、電気−機械変換素子4に結合され該素子と共に伸縮動作する駆動部材3と、駆動部材3と摩擦係合する摩擦部材2と、電気−機械変換素子4に結合される被駆動部材5と、摩擦部材2が固定されるベース部材1とを備え、摩擦部材2は、それぞれの一端側に摩擦係合面を有する第1の弾性部材21と第2の弾性部材22からなり、両部材21、22の他端とが連続して形成され、両部材21、22とが重ね合わされる他端側近傍において、ベース部材1に固定されることを特徴とする駆動装置である。
(もっと読む)
駆動装置及びそれを備えた撮像装置
【課題】部品点数を従来よりも減少させることができる駆動装置を提供すること。
【解決手段】オートフォーカスカメラ10は、フォーカスレンズ11を移動させる移動部13cと、凸部14及び機械端部15と、マイコン部24と、カウンタ28とを備え、マイコン部24は、移動部13cを移動させる移動制御モードと、移動制御モードより前に行われる初期化モードとを動作モードとして有し、初期化モードにおいて、機械端部15のいずれかの位置に凸部14が当たるよう移動部13cを移動させてカウンタ28を予め定めた値に設定する機械端移動動作を行った後、移動方向を反転して予め定めた電力供給時間で移動部13cを移動させた位置を移動制御モードの原点とするものであって、移動制御モードにおいて、カウンタ28のカウンタ値に基づいて移動部13cの位置決め制御を行う構成を有する。
(もっと読む)
圧電アクチュエータ
【課題】平行配置された2つの圧電素子に接続された梁状本体部に形成された柱状突起の先端に楕円運動を生起させることで駆動対象に送りを掛けるようにした圧電アクチュエータの動作効率を向上させる。
【解決手段】第1,第2の圧電素子PZT1,PZT2の先端に固着された梁状本体部5の中央から左右に等しい間隔をおいて同一形状同一寸法の2つの柱状突起6,7を設けると共に、梁状本体部5の中央部には柱状突起6,7と逆方向に向けて突出する中央支持体8を設け、第1,第2の圧電素子PZT1,PZT2および中央支持体8の基部をベースプレート11に固着し、何れかの圧電素子を正弦波または三角波からなる高速送り用駆動信号で駆動することにより、柱状突起6,7の先端に位相の異なる楕円運動を生起させ、圧電素子の1振動周期の内に柱状突起6,7を利用して2回の送り動作をかける。
(もっと読む)
駆動装置及び光学装置
【課題】圧電アクチュエータの駆動特性を考慮して被駆動部材を精度良く移動させることができる駆動装置及び光学装置を提供する。
【解決手段】圧電素子1に駆動軸2を取り付けたアクチュエータ10を有し、駆動信号により圧電素子を伸縮させ、圧電素子1の伸縮動作に応じて駆動軸2を往復運動させて、駆動軸2に摩擦係合させた被駆動部材3を移動させる駆動装置において、被駆動部材3が移動する移動範囲Z内を複数の領域Z1〜Z10に分割して、被駆動部材3の移動速度が移動範囲Z内で同一となるように、複数の領域Z1〜Z10ごとに駆動信号の波形を変更する制御部81を備えることで、被駆動部材3の摩擦係合位置に依存した速度の違いを小さくすることができる。よって、被駆動部材3の駆動制御を正確に行ない、被駆動部材3を精度良く移動させることができる。
(もっと読む)
駆動装置及び光学装置
【課題】複数のアクチュエータを安定に動作させることができる駆動装置及び光学装置を提供する。
【解決手段】
圧電素子6a,8aに駆動軸6b,8bを取り付けたアクチュエータ6,8を有し、駆動信号により圧電素子を伸縮させ、圧電素子6a,8aの伸縮動作に応じて駆動軸6b,8bを往復運動させて、駆動軸6b,8bに摩擦係合させた被駆動部材を移動させる駆動装置において、駆動信号として、同一の周波数fで位相が異なるパルス信号Sy,Sxを用いる第1制御部30を備えることで、各圧電素子の消費電流が最大となるタイミングをずらし、圧電素子6a,8aに共通の電源回路63が出力する瞬間最大電流の増大を抑えることができる。
(もっと読む)
振動アクチュエータ、レンズユニット、及び撮像装置
【課題】振動アクチュエータの組立性を向上させる。
【解決手段】振動アクチュエータ100は、ロータ160、ステータ120、及び電気機械変換部130に挿通され、ベース部150と螺合しており、ベース部150と共にステータ120及び電気機械変換部130を締付ける締付部116と、ステータ120からロータ160の側へ延びる外延部112とが設けられた軸部材110と、外延部112が挿通されると共にステータ120に接するように配され、外延部112と螺合し、ステータ120から振動を付与される振動体210とを備え、軸部材110とベース部150との螺合部と、外延部112と振動体210との螺合部とが互いに逆ネジの関係にあることを特徴とする。
(もっと読む)
駆動装置、およびこれを備えた撮像装置、電子機器
【課題】被駆動体の円滑な駆動が可能であり、かつ小型化が可能な駆動装置を提供する。
【解決手段】駆動装置は、一端部が筐体に固定されており、電気的制御により屈曲変位が生じる電気機械変換素子と、一端部が上記電気機械変換素子に連結されており、他端部が被駆動体と摩擦接触している摩擦部材と、一端部が上記被駆動体に固定されるとともに他端部が上記筐体に固定されており、上記被駆動体を上記摩擦部材側へ付勢する予圧部材とを備えている。これにより、駆動装置の構造をより簡単に、かつ機能をより安定させることができる。即ち、被駆動体の円滑な駆動が可能であり、かつ小型化が可能な駆動装置を提供することができる。例えば、本発明に係る駆動装置をカメラ等の撮像装置のレンズ駆動に用いた場合には、より小型化された、駆動速度がより均一で、かつピント調整の精度がより優れた製品を提供することができる。
(もっと読む)
超音波モータを用いたステージ及びその組立方法
【課題】ステージをコンパクトに構成できると共に、所望の精度を確保でき、更にスケールの防塵を行うことができるようにする。
【解決手段】ベース部2と、テーブル3と、ベース部2とテーブル3との間に配置される案内部材1a、1bと、テーブル3に摺動板固定部材9と一体的に固定される摺動板8と、超音波モータ10と、テーブル3にスケール固定部材6と一体的に固定されるスケール4と、センサ5とを含むステージにおいて、治具部材21を用いて案内部材1a、1bに予圧を与えた状態で案内部材1a、1bを固定した後に治具部材21を取り外し、治具部材21を取り外した位置に摺動板固定部材9と一体的に固定した摺動板8をテーブル3に固定し、及び又は、治具部材21を取り外した位置にスケール固定部材6と一体的に固定したスケール4をテーブル3に固定する、ように構成する。
(もっと読む)
超音波モータ
【課題】超音波モータの駆動時に振動子と被駆動体との間の摩擦により生じる磨耗を抑制し、且つ安定した低速駆動を実現する超音波モータを提供すること。
【解決手段】2相の駆動信号を振動子に印加して当該振動子に楕円振動を発生させ、該楕円振動から駆動力を得て被駆動部材を摩擦駆動する超音波モータを次のように構成する。すなわち、前記2相の駆動信号を生成する信号生成回路25と、当該超音波モータの駆動状態を変化させるように、前記2相の駆動信号の位相差を複数回切り替える制御を行う信号制御回路23と、を前記超音波モータに具備させる。
(もっと読む)
超音波モータ
【課題】単一の部材からなり、構造が単純であり、溝部等が不要であり、縦振動とねじれ振動を容易に励起することができ、該縦振動と該ねじれ振動を合成することにより楕円振動を形成し、該楕円振動によりロータを回転させる超音波モータを提供することである。
【解決手段】超音波モータ10は、中心軸に垂直な断面が矩形状の長さ比率を有する振動子である圧電素子11と、該圧電素子11の楕円振動発生面に接して振動子の該楕円振動発生面と直交する中心軸を回転軸として回転駆動されるロータ16と、を少なくとも備えている。そして、上記圧電素子11の回転軸方向に伸縮する縦1次共振振動と、上記回転軸をねじれ軸とするねじれ2次共振振動とを合成することにより、上記楕円振動を形成する。
(もっと読む)
駆動装置
【課題】摩擦係合部材の振動部材に対する固着を解消できる駆動装置を提供する。
【解決手段】電圧が印加されると伸縮する電気機械変換素子5と、電気機械変換素子5の伸縮によって軸方向に変位する円柱状の振動部材6と、振動部材6に滑り変位可能に摩擦係合する摩擦係合部材7とを有する駆動装置1に、振動部材6を軸周りに回転させる回転駆動部材4と、振動部材6と平行に延伸し、摩擦係合部材7と摺動可能に係合し、摩擦係合部材7の振動部材6の軸周りの回転を規制する案内軸8とを設ける。
(もっと読む)
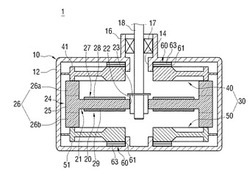
振動アクチュエータ、レンズユニット及び撮像装置
【課題】出力トルクを効率よく向上させることができる振動アクチュエータを提供する。
【解決手段】振動アクチュエータ100は、軸部材110と、軸部材110の軸線L周りに回転自在な一対のロータ160、161と、一対のロータ160、161の間に、一対のロータ160、161のそれぞれに接して配された一対のステータ120、121と、一対のステータ120、121の間に配され、一対のステータ120、121のそれぞれに対して軸線Lの周りに遷移する振動を付与する一対の電気機械変換部130、131と、一対の電気機械変換部130、131の間に配され、ステータ120、121の両方に結合してステータ120、121のそれぞれとの間で対応する電気機械変換部130、131を保持する保持部材170とを備え、ステータ120、121と保持部材170とは、電気機械変換部130、131よりも保持部材170側で結合されている。
(もっと読む)
超音波モータの駆動方法及び駆動装置
【課題】共振周波数の異なる複数の超音波モータを単独駆動及び同時駆動させるための駆動方法及び駆動装置を提供する。
【解決手段】共振周波数の異なる超音波モータA10と超音波モータB20が、駆動装置100の出力に接続される。駆動装置100は、超音波モータA10を単独駆動させる際には「超音波モータA10の駆動可能な周波数の範囲内、且つ超音波モータB20の駆動可能な周波数の範囲外」の周波数を出力し、超音波モータA10と超音波モータB20を同時駆動させる際には「超音波モータA10の駆動可能な周波数の範囲内、且つ超音波モータB20の駆動可能な周波数の範囲内」の周波数を出力し、超音波モータB20を単独駆動させる際には「超音波モータA10の駆動可能な周波数の範囲外、且つ超音波モータB20の駆動可能な周波数の範囲内」の周波数を出力する。
(もっと読む)
201 - 220 / 629
[ Back to top ]