
Fターム[5H680FF25]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 製造、制御、電源、保護 (2,336) | 制御 (1,111) | 周波数制御 (333)
Fターム[5H680FF25]の下位に属するFターム
共振周波数 (159)
Fターム[5H680FF25]に分類される特許
161 - 174 / 174
圧電駆動装置

【課題】 圧電アクチュエータの動作不良状態や動作不能状態といった異常状態から容易に且つ確実に脱出する。
【解決手段】 圧電アクチュエータのロッド部21に対するスライダ部22の移動速度が所定の速度より小さいか否かを駆動速度判定部14によって判別し、駆動速度判定部14により当該移動速度が所定の速度より小さいと判別された場合に、駆動周波数設定部12に、圧電アクチュエータに対する駆動周波数として該圧電アクチュエータの共振周波数(f3)又は共振周波数近傍の周波数を設定し、駆動周波数設定部12に設定した共振周波数又は共振周波数近傍の周波数に基づいて駆動部により圧電アクチュエータを駆動する。
(もっと読む)
超音波モータの制御装置

【課題】 従来のコイルを超音波モータの前段にコイルを入れ、駆動パルスをコイルにより昇圧した駆動波形を超音波モータの電極へ印加する駆動回路は、非常に簡素で低コストで実現できる駆動回路であったが、低速駆動時に駆動電流が大きくなるという問題があった。
【解決手段】 駆動電流を検知しながら、駆動電流が最も小さくなる駆動周波数を探し出し、その周波数に駆動周波数を固定して制御することにより、超音波モータ駆動装置の省電力駆動を実現する。
(もっと読む)
超音波アクチュエータ装置及び超音波アクチュエータ駆動方法
【課題】簡単な構成で超音波アクチュエータ内の駆動機構への負担を減らし、正確な停止位置を得ることができる精度の良い駆動制御が可能な超音波アクチュエータ駆動装置及びアクチュエータ駆動方法を提供する。
【解決手段】本発明の超音波アクチュエータ駆動装置1は、制御部2、駆動部3、第1及び第2振動情報検出部4、6、超音波振動子5A及び被駆動体5Bを有する超音波アクチュエータ5とを備え、前記制御部2は、前記被駆動体5Bを起動又は停止するにあたり、前記超音波振動子5Aの振動状態(例えば屈曲振動モード、楕円振動モード、無給電モードの3つの振動モード)を切り替えることによって、前記被駆動体5Bに対する駆動力を徐々に変化させるように制御する。
(もっと読む)
アクチュエータの駆動装置、アクチュエータを用いた機器および画像形成装置
【課題】 簡単な構成で速度及び位置の定常誤差を共にゼロにすることができるアクチュエータの駆動装置を提供する。
【解決手段】 アクチュエータの駆動状態を検出する検出手段7と、検出手段から得られた駆動状態と所定の状態との差を演算する演算手段1と、演算手段から得られた値を積分する第1の積分手段2と、第1の積分手段から得られた値を積分する第2の積分手段3と、第1の積分手段から出力される値と第2の積分手段から出力される値とを加算する加算手段37とを有し、加算手段から出力される値に応じてアクチュエータに供給するエネルギー量を調定する。
(もっと読む)
超音波モータとその運転方法
【課題】 複数の振動モードを同時に発生させる超音波モータにおいて、各振動モードを効率よく発生させて、安定して高いモータ出力を得る。
【解決手段】 電気機械変換素子を備え、該電気機械変換素子に所定の位相差および所定の駆動周波数の2相の交番電圧を供給することにより、異なる2つの振動モードを同時に発生させて出力端14に略楕円振動を生じさせる超音波振動子3と、該超音波振動子3の出力端14を被駆動体2に押し付ける押圧手段4とを備え、該押圧手段4による超音波振動子3の出力端14の被駆動体2への押圧力が、2つの振動モードの機械的共振周波数をほぼ一致させるように設定されている超音波モータ1を提供する。
(もっと読む)
超音波モータの駆動回路およびアクチュエータ
【課題】簡易な構成で、超音波モータの駆動を容易かつ確実に制御することができ、駆動効率が高く、かつ制御分解能の高い超音波モータの駆動回路およびアクチュエータを提供する。
【解決手段】駆動回路5は、圧電素子を備える超音波モータ2を駆動する駆動回路であって、パルス生成手段と、単位期間設定手段と、パルス信号の単位期間内のパルス数を調節するパルス数調節手段と、前記調節されたパルス信号に対応するように、交流電圧を前記圧電素子に印加するとともに、前記交流電圧を前記圧電素子に印加している時間帯と重複しない時間帯において、前記パルス生成手段により生成されたパルス信号に対応するように、振幅の小さい交流電圧を前記圧電素子に印加し、前記超音波モータ2を駆動する駆動手段とを有し、前記単位期間内のパルス数を調節することにより、前記超音波モータ2の駆動を制御する。
(もっと読む)
超音波モータの駆動回路およびアクチュエータ
【課題】簡易な構成で、超音波モータの駆動を容易かつ確実に制御することができ、駆動効率の高い超音波モータの駆動回路およびアクチュエータを提供する。
【解決手段】超音波モータ2の駆動回路5は、交流電圧の印加により伸縮する圧電素子と、被駆動体に対して当接する接触部とを有する振動体を備える超音波モータを駆動する駆動回路であって、パルス信号を周期的に生成するパルス生成手段と、単位期間を周期的に設定する単位期間設定手段と、前記パルス信号の周期を保持しつつ、該パルス信号の前記単位期間内のパルス数を調節するパルス数調節手段と、前記調節されたパルス信号に対応する交流電圧を前記圧電素子に印加して前記超音波モータ2を駆動する駆動手段とを有し、前記パルス数調節手段によって前記単位期間内のパルス数を調節することにより、前記超音波モータ2の駆動を制御する。
(もっと読む)
リニア超音波圧電モータ
本発明は、プレート状の長方形の共振板と摩擦接触状態にあって、摩擦面は上記共振板の長手方向の狭い側面の少なくとも一方によって具現される移動エレメントと、上記共振板の長手方向の広い側面に配置される、音響振動を生成するための電極とを備えるリニア超音波圧電モータに関する。本発明によれば、音響振動を生成するための発生器は上記共振板を対称的に横断する平面に対して非対称に配置され、かつ励振されると非対称空間定在波を発生させる対向する2つの電極を備える。 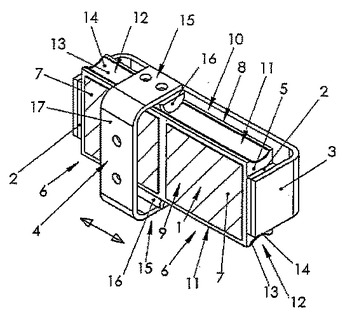 (もっと読む)
(もっと読む)
圧電アクチュエータの駆動速度調整方法、圧電アクチュエータの駆動装置、電子機器、圧電アクチュエータの駆動装置の制御プログラム及び記憶媒体
【課題】 圧電アクチュエータの特性にバラツキがあっても、駆動対象を所定速度で駆動でき、制御が容易でコストも低減できる圧電アクチュエータの駆動装置の提供。
【課題手段】 圧電アクチュエータの駆動装置は、圧電素子に加える駆動信号の周波数を所定範囲でスイープさせる周波数制御手段51を備える。周波数制御手段51は、駆動信号の周波数のスイープ方向を制御するスイープ方向制御部61、スイープ速度を制御するスイープ速度制御部63、周波数分解能を制御する分解能制御部62を備える。スイープ方向、スイープ速度、周波数分解能を適宜制御するだけで圧電アクチュエータの駆動速度を簡単に制御できる。
(もっと読む)
圧電アクチュエータおよび機器
【課題】 駆動性能の確実性を向上させることができる圧電アクチュエータおよび機器を提供すること。
【解決手段】 検出電極82D,82Eを、屈曲振動モードの振動の腹を含む位置に形成した。このため、屈曲の歪も最大となり縦振動モードの位相差の影響を打ち消すことができる。また、屈曲振動モードを励振するのに使用する側の駆動電極82B,82Cの位置にそれぞれ検出電極82D,82Eを形成した。これにより、縦振動モードとは逆符号の屈曲振動モードの位相差が生じるので、縦振動モードが主である周波数と、屈曲振動モードが主である周波数との位相差による区別が容易になり、各周波数の振動挙動に基づいて的確に制御できる。したがって、縦振動モードの振動による良好な駆動力の確保が確実となる。
(もっと読む)
圧電ドライブを備えた測地測定器
測地測定器
測地測定器(4)を位置決めするための固定デバイス(8)と、目標を測量するための光学ビーム進路を有する測定部品(7)とを備えた測地測定器(4)であって、測定部品(7)は、固定デバイス(8)に対して移動可能なアラインメント部品(5)の中に装着されるとともに、アラインメント部品(5)に対して移動可能になっており、少なくとも一つの圧電マイクロモータ(1b,1c)によって光学ビーム進路が変更される。  (もっと読む)
(もっと読む)
圧電アクチュエータ駆動装置、電子機器、その駆動方法、その駆動制御プログラム、そのプログラムを記録した記録媒体
電源と、圧電アクチュエータAと、この圧電アクチュエータの駆動を制御する駆動制御装置100とを備えた電子機器において、駆動制御装置100は、駆動信号SDRを振動体12の圧電素子に供給する駆動回路111と、振動体12の振動状態を表す位相差を検出する位相差検出手段120と、振動状態の目標となる目標位相差を補正する比較電圧設定回路133と、位相差と目標位相差とを比較する駆動周波数設定手段140とを備え、比較結果に基づいて位相差が目標位相差に近づくように駆動信号SDRの駆動周波数を変更させことで、駆動電圧に依存せず、高効率な圧電アクチュエータAの駆動が実現できる。 (もっと読む)
小型圧電/電歪超音波リニアモータ
本発明は、携帯電話機やPDAなどのカメラレンズ駆動用として搭載可能な小型圧電/電歪超音波リニアモータに関するものである。圧電基板又は電歪基板を弾性体20(金属)に付着した単一又は二重(uni又はbimorph)形態に移動軸を付着し、移動軸30に搭載された移動体40が圧電基板又は、電歪基板の屈曲振動により線形的に移動するもので、製造工程が簡単で基本原理に基づく応用が容易であり、また特性の優れた小型圧電/電歪超音波リニアモータに関するものである。  (もっと読む)
(もっと読む)
広周波数域電気機械式アクチュエータ
2次元運動可能でありアクチュエータ支持体(12)に接続された駆動エレメント(14ad)を有する電気機械式アクチュエータ(10)が開示される。アクチュエータ支持体(12)はフェロメカニカル的に非能動的である材料で作られる。さらに、駆動エレメント(14a−d)とアクチュエータ支持体(12)との間のジョイントは堅固であり非常に安定している。これは、たとえば、熱硬化プラスチック接着、拡散ボンディング、又は、共焼結によって作られた不可逆的なジョイントの使用によって実現される。共焼結が好ましい。アクチュエータ支持体(12)材料は、堅固であるように選択され、好ましくは70GPa、より好ましくは100GPaを超える剛性を有し、好ましくは5W/mK、より好ましくは10W/mKを超える高い熱伝導率を有する。電極(22)は、剛性を増大させると同時に熱伝導率を改善するため、好ましくはアクチュエータ支持体に一体化される。駆動エレメント(14a−d)は、好ましくは、少なくとも駆動面において、熱伝導材料によって覆われる(28、26)。 (もっと読む)
161 - 174 / 174
[ Back to top ]