
Fターム[5H680FF25]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 製造、制御、電源、保護 (2,336) | 制御 (1,111) | 周波数制御 (333)
Fターム[5H680FF25]の下位に属するFターム
共振周波数 (159)
Fターム[5H680FF25]に分類される特許
21 - 40 / 174
撮影装置
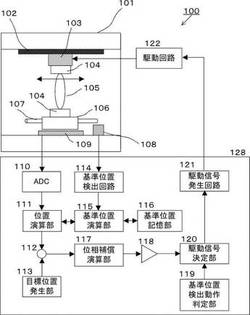
【課題】低消費電力で振動アクチュエータの起動性能の劣化を抑制可能な撮影装置を提供する。
【解決手段】撮影装置は、振動を発生する振動子と振動子に接触する固定子とを備え、振動子に複数の周期駆動信号が印加されることにより駆動力を得る振動アクチュエータと、振動アクチュエータの駆動力により移動する移動部の相対位置を検出する位置検出センサと、移動部の絶対位置を求める際の基準となる基準位置を検出する基準位置検出センサと、基準位置の検出動作の際に印加される複数の周期駆動信号の駆動周波数を、撮影の際に印加される複数の周期駆動信号の第1周波数領域よりも低い第2周波数領域の範囲内に設定する駆動信号決定部とを有する。
(もっと読む)
振動型モータの制御方法および振動型モータの駆動装置

【課題】温度変化や駆動負荷の変化による電流の増加に対して電流の供給量を越えないようにすると共に、その供給量の制限内で大きい出力を出せるように、周波数及びパルス幅が制御可能な振動型モータの制御方法を提供する。
【解決手段】楕円運動を生成するための駆動信号を発生させる駆動信号発生手段と、駆動信号を前記電源の電圧でスイッチングし、駆動信号のパルス幅を変更するスイッチング手段と、スイッチング手段を介して電気−機械エネルギー変換素子に流れる電流を検出する電流検出手段と、被駆動体の位置および速度を検出する検出手段と、各手段の制御を司ると共に、被駆動体の速度を設定する制御部と、を備え、制御部は、目標速度に対し、電流検出手段による検出電流が所定のリミット値を越えない範囲内で最大限の出力特性が出せるように、駆動信号の周波数とパルス幅を制御する。
(もっと読む)
複数の振動子を用いた振動型アクチュエータの制御装置並びに調整方法、振動型アクチュエータ、及びそれを用いたレンズユニット並びに光学機器
【課題】 1つの被駆動体を複数の振動子で駆動する振動型アクチュエータにおいて、振動子を組み込んだ後でも個々の振動子の特性を調整することを可能にする。
【解決手段】 複数の振動子のうち1つ以上の振動子を駆動させその他の振動子を定在波駆動させた状態で被駆動体の速度を取得することにより各々の振動子における交流信号の周波数に対する被駆動体の速度の特性を取得し、取得した特性に基づいて各々の振動子に供給する交流信号の振幅と周波数と各々の振動子に供給する2つの交流信号の位相差のうち少なくとも1つを調整することで複数の振動子間の特性のずれを低減する。
(もっと読む)
振動型アクチュエータの制御装置及び制御方法
【課題】 ロータの回転方向を切り替える際、ロータの速度変動や可聴音が生じる可能性があった。
【解決手段】 本発明の振動型アクチュエータの制御装置は、第1の交流電圧を振動体に印加することによって前記振動体の接触部に生成する第1の楕円運動と、第2の交流電圧を前記振動体に印加することによって前記接触部に生成する、前記第1の楕円運動とは異なる向きに回転する第2の楕円運動と、の合成によって、前記振動体と前記振動体の接触部に接触する移動体とを相対移動させる。そして、前記第1の交流電圧と前記第2の交流電圧とを前記振動体に印加する電圧供給手段を有し、前記電圧供給手段は、前記相対移動の速度指令に応じて前記第1の楕円運動の振幅と前記第2の楕円運動の振幅との差を変化させるように、前記第1の交流電圧の振幅と前記第2の交流電圧の振幅とを夫々変化させることを特徴とする。
(もっと読む)
振動型アクチュエータの駆動装置
【課題】 ディジタル的に設定可能な交流信号のパラメータを操作量として振動型アクチュエータの振動振幅や移動速度を制御する際に、上記パラメータの設定可能分解能以上の分解能を実現すると同時に不要な振動の発生を抑制する。
【解決手段】 交流信号の周波数、振幅、位相差の少なくとも一つを指令する指令信号を出力する指令手段と、指令信号に変動を与えて出力する変動付与手段と、変動付与手段の出力に応じて周波数、振幅、位相差の少なくとも一つが変調された交流信号を発生する交流信号発生手段とを有し、前記変動付与手段又は前記交流信号発生手段の少なくとも一方の出力信号に対し、所定の振動モードの振動以外の振動を励起する周波数帯域を選択的に減衰させるフィルタ手段を設ける。
(もっと読む)
振動体の駆動方法、振動装置、該振動装置を有する駆動装置と塵埃除去装置と光学機器
【課題】振動によって塵埃を含む対象物を、効率よく所定の方向に移動させることが可能となる振動体の駆動方法等を提供する。
【解決手段】振動体に次数の異なる定在波を、所定の時間位相差を設けて発生させる振動体の駆動方法であって、
振動体は、第1の方向に並ぶ複数の節線を有する第1の振動モードと、
第1の方向に並ぶ節線の数が第1の振動モードと異なり、且つ第1の振動モードよりも固有振動数が高い第2の振動モードと、
固有振動数が、第1の振動モードと第2の振動モードの間に位置する第3の振動モードと、を有し、
第1の振動モードと第2の振動モードの内、第3の振動モードとの固有振動数の差が小さい振動モードに対する加振力を、固有振動数の差が大きい振動モードに対する加振力よりも大きくして駆動する。
(もっと読む)
圧電アクチュエーターの制御装置、圧電アクチュエーター装置及び印刷装置
【課題】圧電アクチュエーターの高出力での駆動を安定して行うことができる圧電アクチュエーターの制御装置を提供する。
【解決手段】圧電素子に所定の周波数の駆動信号を供給する駆動手段310と、圧電素子の機械的な変位を検出する変位検出部330と、変位信号V1,V2を逐次記憶する記憶部340と、変位検出部330が検出した変位及び記憶部340が記憶している変位に基づき駆動手段310を介して駆動信号の周波数を制御する駆動周波数制御部320とを有し、駆動周波数制御部320は、駆動信号の周波数をスイープさせ、圧電アクチュエーターの最大変位を検出するとともに、最大変位に基づき定められる目標変位に対応する駆動周波数に向けて周波数をスイープさせる。目標変位に対応する駆動周波数に達した後、駆動信号の周波数を変動させることで変位信号が目標変位に追従するように周波数を制御する。
(もっと読む)
振動波駆動装置の駆動制御装置及び駆動制御方法
【課題】高ダイナミックレンジ化や、静音化を図ることが可能となる振動波駆動装置の駆動制御装置及び駆動制御方法を提供する。
【解決手段】電気−機械エネルギー変換素子を備えた振動子に駆動信号を与えることで、前記振動子に接触する被駆動体を相対移動させる振動波駆動装置の駆動制御装置であって、
前記駆動信号の周波数を変化させて前記被駆動体を起動させる際、周波数を変化させる毎に前記駆動信号をオフさせる時間を設ける。
(もっと読む)
振動装置の駆動回路、及び振動装置の駆動方法
【課題】振動体上を移動する振動波を発生させるに際し、低エネルギーで振動波を効率良く発生させ、振動体に接する被移動体を所定の方向に移動させることが可能となる振動装置を提供する。
【解決手段】第1の振動モードの振動と、これとは次数の異なる第2の振動モードの振動と、を弾性体上に励振し、弾性体上に前記第1と第2の振動モードの振動とを合成した合成振動波を形成する振動装置の駆動回路であって、
第1の振動モードの振動を励振するための第1の交流信号を発生する第1の信号発生器と、第2の振動モードの振動を励振するための第2の交流信号を発生する第2の信号発生器と、
第1の交流信号と第2の交流信号の周波数が異なる周波数となるよう信号発生器の発生する周波数を設定し、
合成振動波の移動方向に応じて合成振動波の振動振幅に差を生じさせるよう第1の交流信号と第2の交流信号のうち少なくとも一方を制御する制御手段と、を有する。
(もっと読む)
駆動システム
【課題】制御対象となる作用素の数が増大した場合であっても、所望の作用を呈するように容易に制御することが可能な駆動システムを提供する。
【解決手段】外部の環境に対して所定の作用を呈する作用素13と、作用素13を駆動する駆動源12とを有する駆動体14を複数備え、複数の駆動体14、14、・・・を、一の信号源11が発する信号に応じて動作するように制御する。外部の環境に対して呈する作用による環境の変化に関する情報を取得するセンサ15を有し、センサ15が取得した環境の変化に関する情報に基づいて、信号源11が発する信号を調整する。
(もっと読む)
駆動装置、レンズユニット、カメラモジュール
【課題】より小型化に適した駆動装置を提供する。
【解決手段】駆動装置は、固定された支持軸44と、支持軸44に対して摺動可能に設けられたスライダ42と、駆動電圧に応じて伸縮変形する圧電素子43と、を備える。圧電素子43はスライダ42に取り付けられている。圧電素子43の伸縮方向はスライダ42の移動方向と平行であり、圧電素子43は、スライダ42の面のうち移動方向に対して垂直な端面423に取り付けられている。また、圧電素子と支持軸との距離は近いことが好ましく、例えば、圧電素子と支持軸との距離は支軸軸の軸径の2倍以下とする。
(もっと読む)
振動型アクチュエータの駆動回路
【課題】 従来の振動型アクチュエータの駆動回路は、起動から所望の回転数までの使用する周波数域において、周波数に対する出力電圧の変動が大きく、制御性を悪化させていた。
【解決手段】 本発明の振動型アクチュエータの駆動回路は、インダクタとキャパシタとが振動体に直列に接続され、前記インダクタと前記キャパシタとによる直列共振周波数をfsとし、前記振動体の共振周波数をfmとした場合に、0.73・fm<fs<1.2・fmを満たすことを特徴とする。
(もっと読む)
振動アクチュエータ駆動装置、レンズ鏡筒、及び、電子カメラ
【課題】振動アクチュエータを駆動する際に生じるノイズを低減する振動アクチュエータ駆動装置を提供する。
【解決手段】振動アクチュエータ駆動装置(14)は、周波数を有する駆動信号を振動アクチュエータに出力する出力部(144)と、前記振動アクチュエータ(12)の駆動を指示する信号が入力されると、予め定められた第1振幅を有する前記駆動信号を前記振動アクチュエータ(12)に出力した後に、前記駆動信号の振幅を前記第1振幅から当該第1振幅より大きい予め定められた第2振幅まで増加させつつ当該駆動信号を前記振動アクチュエータ(12)に出力する第1動作を前記出力部(144)に行わせる制御部(141)を備える。
(もっと読む)
振動型モータ制御装置
【課題】 駆動速度を駆動信号位相差によって制御する振動型モータの制御装置において、共振周波数の変動やばらつきによって起こり得る大きな速度駆動を抑える制御をより簡単に行うための構成を提供する。
【解決手段】 圧電体に対して位相の異なる2つの駆動信号A相、B相が印加されことによって圧電体が振動して駆動力が発生する振動型モータの制御装置であって、駆動信号位相差θkを制御する位相差制御手段を有し、位相差制御手段は、振動型モータの駆動速度を変化させる場合に、第1の方向に駆動する場合には0度以上90度以下の範囲を、第1の方向とは反対の第2の方向に駆動する場合には180度以上270度以下の範囲を、駆動信号位相差θkを変化させる範囲とする、または第1の方向に駆動する場合には90度以上180度以下の範囲を、第2の方向に駆動する場合には270度以上360度以下の範囲を、駆動信号位相差θkを変化させる範囲とする。
(もっと読む)
振動型モータ制御装置および光学機器
【課題】振動型モータの本来の速度可変領域を十分に使用することができるようにする。
【解決手段】振動型モータ制御装置は、位相差を有する第1および第2の周波信号が印加された電気−機械エネルギ変換素子20により振動が励起される振動体と、該振動体に接触する接触体とを相対移動させる振動型モータの駆動速度を制御する。該装置は、位相差を固定して第1および第2の周波信号の周波数を変更する周波数制御と、周波数を固定して位相差を変更する位相差制御とを切り換えながら行うことで振動型モータの駆動速度を増減させる速度制御手段1を有する。
(もっと読む)
超音波モータ
【課題】製造上の様々な理由により振動子における異なる振動モードの共振周波数にばらつきが生じたとしても、調整により、超音波モータが駆動した場合には振動子における異なる振動モードの共振周波数が略一致するようにさせることができるようにする。
【解決手段】超音波モータは、異なる振動モードを縮退させ夫々の振動モードの振動に位相差を持たせることにより楕円振動を生じさせる振動子1と、振動子1に対して相対移動可能に構成された可動体3と、可動体3の相対移動方向と略平行の方向に対して振動子1が固定されるように保持する保持機構4と、振動子1を可動体3に押圧する押圧機構5とを備える。ここで、保持機構4は、当該超音波モータが駆動した場合に振動子1における異なる振動モードの共振周波数が略一致するようにさせるための調整手段を含む。
(もっと読む)
移動機構、顕微鏡、最適駆動パラメータ抽出方法、及びプログラム
【課題】安定して確実に動作する超音波モータの最適駆動パラメータを簡便に設定することができるようにする。
【解決手段】移動機構は、固定台1と移動体3とを相対移動させる超音波モータ6と、固定台1と移動体3との相対移動量を検出する変位センサ8と、変位センサ8により検出された相対移動量が入力され、超音波モータ6に駆動信号を出力する制御装置9とを備える。制御装置9は、超音波モータ6に出力する駆動信号の最適駆動パラメータを抽出する機能を有する。この機能に係る処理では、超音波モータ6に出力する駆動信号の駆動パラメータを設定し、当該駆動信号を超音波モータ6に出力し、当該駆動信号の出力による固定台1と可動体3との相対移動量を変位センサ8から取得する、という処理を駆動パラメータを変更させながら繰り返し、変位センサ8から取得した相対移動量に基づいて最適駆動パラメータを抽出する。
(もっと読む)
圧電駆動装置、圧電駆動装置の制御方法および電子機器
【課題】高効率な駆動を実現することができる圧電駆動装置、圧電駆動方法および電子機器を提供する。
【解決手段】駆動信号の周波数として縦振動と反共振動の共振周波数を有する圧電素子を備える圧電アクチュエーターを以下のように駆動制御する。先ず、駆動開始時は初期駆動制御モードで駆動を制御し、その後、被駆動体のローターが所定量駆動するまでは定常駆動制御モードに切り替えて駆動を制御する。定常駆動制御モードでは、ローターの振動状態に基づいて周波数制御される駆動信号を圧電素子に印加し、かつ、定常駆動制御モードでの駆動を終了する際にその時の駆動信号の周波数を次回駆動時の駆動周波数f0として記憶する。初期駆動制御モードでは、初めに圧電素子に駆動周波数f0よりも低い固定周波数fr1の駆動信号を印加し、その後、予め設定されたタイミングで、駆動周波数f0に固定された駆動信号を印加する。
(もっと読む)
圧電モーター、液体噴射装置及び時計
【課題】コストが高騰することなく、トルクや回転速度などの回転特性を可変可能な圧電モーター、液体噴射装置及び時計を提供する。
【解決手段】圧電体層40と該圧電体層40を挟んで両側にそれぞれ設けられた第1電極50及び第2電極60とを有する圧電素子30と、圧電素子30が固定される振動部材20と、を有する圧電アクチュエーター10と、前記振動部材20の長手方向の一端部に設けられた当接部21が当接されて回転駆動する回転軸3と、前記圧電アクチュエーター10を前記回転軸3に向かって付勢する付勢手段80と、を具備する圧電モーター1であって、前記回転軸3の前記当接部21が当接する領域が、前記圧電素子30と前記振動部材20の積層方向に対して傾斜した傾斜面3aとなっており、前記圧電素子30に駆動信号を印加すると共に、前記駆動信号の電圧をオフセットする制御部を有する。
(もっと読む)
超音波アクチュエータ
【課題】駆動開始時および駆動中においても、高効率の駆動が可能である超音波アクチュエータを提供する。
【解決手段】超音波アクチュエータ100は、振動体2と、圧電振動子2bの振動により駆動される移動体1と、駆動信号を生成する駆動信号生成部11と、圧電振動子2bの振動状態にもとづいて、駆動信号生成部11を制御する駆動信号制御部10とを備え、起動時において、圧電振動子が振動し、かつ移動体が駆動されない状態において、駆動信号制御部10が最適駆動周波数を検出し、駆動信号制御部10は最適駆動周波数を検出後、最適駆動周波数を有し、移動体1が駆動されるような駆動信号を生成するよう駆動信号生成部11を制御する。
(もっと読む)
21 - 40 / 174
[ Back to top ]