
Fターム[5H680FF25]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 製造、制御、電源、保護 (2,336) | 制御 (1,111) | 周波数制御 (333)
Fターム[5H680FF25]の下位に属するFターム
共振周波数 (159)
Fターム[5H680FF25]に分類される特許
41 - 60 / 174
圧電駆動装置、圧電駆動方法および電子機器
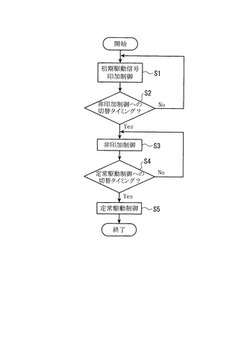
【課題】圧電アクチュエーターの起動時の効率を大幅に向上することができる圧電駆動装置、圧電駆動方法および電子機器を提供する。
【解決手段】圧電駆動装置は、圧電アクチュエーターと、駆動制御手段とを備える。駆動制御手段は、圧電アクチュエーターの起動初期に行う初期駆動制御と、初期駆動制御後に行う定常駆動制御S5とを実行する。初期駆動制御では、圧電素子に初期駆動信号を印加する初期駆動信号印加制御S1を実行後、圧電素子に駆動信号を印加しない非印加制御S2を実行する。初期駆動信号印加制御から非印加制御に切り替えるタイミングは、初期駆動信号の印加による被駆動体の動作が開始されるまでに設定し、初期駆動制御から定常駆動制御に切り替えるタイミングは、初期駆動信号の印加による被駆動体の動作開始時以降でかつ被駆動体の動作停止時および/または前記圧電素子の放電完了時までに設定する。
(もっと読む)
振動波モータの駆動方法及び駆動装置

【課題】振動波モータの実際の回転速度と目標回転速度の回転速度差に応じて、振動波モータに供給する交流電圧の周波数を適切に制御する振動波モータの駆動方法を提供する。
【解決手段】交流電圧により振動体401に振動を発生させて移動体403を駆動する振動波モータ101を、移動体403の目標回転速度Nobjnを設定し、交流電圧の周波数更新量Δfnに対する移動体403の回転速度の増減量ΔNnの割合Tnを求め、目標回転速度Nobjnと移動体403の実際の回転速度Nnとの回転速度差Nobjn−Nnを求め、回転速度差Nobjn−Nnを割合Tnで除することにより周波数更新量Δfnを求め、周波数更新量Δfnを用いて交流電圧の周波数fnを更新する処理を行うことにより、駆動制御する。
(もっと読む)
振動アクチュエータ駆動装置、レンズ鏡筒、カメラ
【課題】振動アクチュエータに対する入力電力の損失を低減し、効率的に電力を供給する振動アクチュエータ駆動装置を提供する。
【解決手段】振動アクチュエータ駆動装置(100)は、電圧を印加される1次側インダクタ(311A、311B)と、電気機械エネルギー変換素子(41A、41B)に電圧を印加する2次側インダクタ(314A、314B)とを有するトランス部(31A、31B)と、2次側インダクタ(314A、314B)と、電気機械エネルギー変換素子(41A、41B)との間に流れる電流の通電状態を切り替えるスイッチング部(34A、34B)と、1次側インダクタ(311A、311B)に流れる電流の方向に応じて、スイッチング部(34A、34B)により2次側インダクタ(314A、314B)に流れる電流の通電状態を切り替える制御部(2)とを具備する。
(もっと読む)
超音波モータ
【課題】 板状圧電素子と弾性体とを容易に位置決めできる超音波モータを提供すること。
【解決手段】 超音波モータ1は、平面124aと斜面124bと貫通口124cとを有する中空の柱形状の中部基本弾性体124と、貫通口19aを有し斜面124bに傾斜した状態で積み重なる積層型圧電素子18と、平面126aと斜面126bと貫通口126cとを有し、斜面126bにて積層型圧電素子18に積み重なり、斜面124bと斜面126bとの間で積層型圧電素子18を挟み込む中空の柱形状の上部基本弾性体126と、平面126aの上方に配設される摩擦子26と、摩擦子26によって駆動されるロータ53と、ロータ53を摩擦子26に押圧する押圧機構70と、上部基本弾性体126と積層型圧電素子18と中部基本弾性体124とに配設され、それぞれの積層方向に対する周方向における積層型圧電素子18の位置決めを行う位置決め機構140と、を具備する。
(もっと読む)
アクチュエータ駆動装置、レンズ鏡筒および撮像装置
【課題】回路規模を大きなものとすることなく、電源の電圧が変動した場合においても、アクチュエータの駆動を適切に制御することができるアクチュエータ駆動装置を提供すること。
【解決手段】アクチュエータを駆動させるための電源からの電圧を検出する電圧検出手段と、前記アクチュエータに駆動信号を出力する駆動信号出力手段と、前記電源からの電圧及び前記駆動信号と、前記アクチュエータの駆動速度との関係を示す情報を記憶する記憶手段と、を備え、前記駆動信号出力手段は、前記電圧検出手段で検出された前記電源からの電圧に応じて、前記記憶手段に記憶された前記情報に基づいて求めた駆動信号を出力することを特徴とするアクチュエータ駆動装置。
(もっと読む)
超音波モータ
【課題】低速駆動を行う場合であっても、不感帯の影響を小さくして良好な制御性且つ高い速度分解能で駆動可能な超音波モータを提供すること。
【解決手段】駆動位相差と駆動速度と特性直線上の駆動点を切り替えて駆動速度を制御する制御CPU22を、超音波モータに具備させる。この制御CPU22は、駆動速度を減少させる場合、駆動周波数の値を変化させずに駆動位相差を増加させ、該駆動点で所定時間だけ駆動した後、駆動位相差を変化させずに駆動周波数の値を前記振動子の共振周波数により近付ける値に切り替える制御を、所望の駆動速度に達するまで繰り返し実行し、駆動速度を増加させる場合、駆動周波数の値を変化させずに駆動位相差を減少させ、該駆動点で所定時間だけ駆動した後、駆動位相差を変化させずに駆動周波数の値を前記振動子の共振周波数からより遠ざける値に切り替える制御を、所望の駆動速度に達するまで繰り返し実行する。
(もっと読む)
振動波駆動装置
【課題】振動子の駆動振動を阻害せず、摺動面から励振される不要な振動を効果的に減衰させて、鳴きや異音の発生を抑制することが可能となる振動波駆動装置を提供する。
【解決手段】複数の定在波振動の合成によって楕円運動が形成可能に構成された振動子と、該振動子を支持する支持部材を備え、
前記振動子は少なくとも圧電素子と接触部材とからなり、前記振動子の楕円運動によって、該振動子の接触部材と接触する被駆動体を駆動する振動波駆動装置であって、
該振動波駆動装置には振動抑制部材が備えられており、該振動子に励振される前記複数の定在波振動における節円または節線が含まれるそれぞれの節がお互いに交差し重なり合う共通の節の内、
該振動子の支持部分と異なる節に対して前記振動抑制部材が当接するよう設けられた構造を備えている。
(もっと読む)
振動アクチュエータ、レンズ鏡筒、および光学装置
【課題】低速から高速まで安定して動作することが可能な振動アクチュエータと、そのアクチュエータを有するレンズ鏡筒および光学装置を提供すること。
【解決手段】電気機械変換素子104に交流電圧が印加されることにより、振動波が発生する振動部材103と、振動波によって振動部材103に対して相対移動する相対移動部材102と、電気機械変換素子104に前記交流電圧を印加する電圧印加手段22,23,25と、振動部材103と相対移動部材102との相対移動速度に応じて交流電圧の振幅を変化させる制御手段20とを有する振動アクチュエータ。
(もっと読む)
超音波モータ
【課題】駆動位相差を変化させることによる速度制御を行う場合であっても、精度の良好な周波数追尾を行うことが可能な超音波モータを提供すること。
【解決手段】第1の駆動信号及び第2の駆動信号を超音波振動子4に印加して当該超音波振動子4に楕円振動を発生させ、該楕円振動から駆動力を得て被駆動体5を摩擦駆動する超音波モータに、次のような制御を行う制御CPU22を具備させる。前記制御CPU22は、前記第1の駆動信号及び前記第2の駆動信号を生成し、前記振動子の振動状態を検出して振動検出信号を生成し、前記第1の駆動信号と前記第2の駆動信号との合成波と、前記振動検出信号と、の位相差が所定の範囲内になるように前記駆動信号生成部を制御する。
(もっと読む)
振動波駆動装置
【課題】被駆動体と振動子との接触部に介在する水分を除去し、摩擦力を所定の摩擦力に回復することによって、所定の速度で駆動させることが可能となる振動波駆動装置を提供する。
【解決手段】電気−機械エネルギー変換素子を有する振動子と、該振動子に設けられた駆動部に対して離散的に加圧接触する被駆動体と、前記素子に駆動信号を与える第1の駆動信号付与手段と、を備え、
前記駆動信号付与手段により前記素子に駆動信号を与えて前記振動子の駆動部に楕円運動を生じさせ、該駆動部と加圧接触する前記被駆動体を前記振動子に対して相対移動させる振動波駆動装置であって、
前記第1の駆動信号付与手段とは別の第2の駆動信号付与手段を備え、
前記第2の駆動信号付与手段によって、前記素子に周期的動作を行う駆動信号を与え、前記駆動部と前記被駆動体との接触部に介在する水分を除去するように構成される。
(もっと読む)
モータ駆動装置、制御方法、及びプログラム
【課題】振動波モータの起動時間の短縮及び被駆動体の滑らかな制御を可能としたモータ駆動装置、制御方法、及びプログラムを提供する。
【解決手段】振動波モータ駆動回路のCPU5は、移動体4を予め定められた速度で駆動するために設定された変更後の2相の交流電圧の位相差が予め定められた位相差の下限値よりも小さくなる場合は、2相の交流電圧の周波数を上げる。また、変更後の2相の交流電圧の位相差が予め定められた位相差の上限値よりも大きくなる場合は、2相の交流電圧の周波数を下げる。位相差を変更することにより、第1の曲げ振動モードの振動の大きさと第2の曲げ振動モードの振動の大きさとの比を変化させて移動体4の移動速度を予め定められた速度とする。
(もっと読む)
超音波モータ
【課題】エンコーダなどのセンサを用いることなく、移動体の回転位置や回転速度の検出が可能な超音波モータにおいて、S/Nを向上しつつ、駆動性能の低下を抑える。
【解決手段】移動体13が、溝13cの刻設された移動体本体13aにカバー板13bを積層して成り、前記カバー板13bの部分に、振動体(ステータ)が圧電振動によって発生された楕円振動を与えることで該移動体13が回転し、前記溝13cの通過による駆動信号の変化から位置検出を行うようにしたセルフセンシング方式の超音波モータにおいて、前記溝13cを少なくともカバー板13bの幅以上に形成する。したがって、カバー板13bの下方は、必ずその溝13cによる空孔となっており、剛性の変化から、高いS/Nの検出信号を得ることができる。また、そのS/Nの高さから、溝13cの幅を狭くでき、駆動性能の低下(前記楕円振動の減衰)を抑えることができる。
(もっと読む)
駆動装置及び駆動方法
【課題】 接触面の摩耗が生じても適正な精度で長時間駆動可能な駆動装置及び駆動方法を提供する。
【解決手段】 レンズ9とレンズ枠10から構成される移動体は、少なくとも電気機械エネルギー変換素子を含む振動体11,12,13によって3箇所で支持されている。光軸に垂直な平面内(X方向とY方向とで規定されるXY平面内)における所定領域内でレンズ9を移動させる際にレンズ枠10と振動体11,12,13とが接触しうる領域が接触領域31a,32a,33aである。駆動制御部35は、所定領域内でレンズ枠109を移動させるのみならず、接触領域31a,32a,33aが接触領域31b,32b,33bとなるように、レンズ枠10を駆動させることもできる。
(もっと読む)
高電圧出力ドライバー
【課題】効果的な負荷の接続異常検出を行う。
【解決手段】駆動電源電圧は、制御信号に応じて変更される。アンプAP1,AP2は、前記駆動電源電圧にから負荷PZへ供給する駆動電流を出力する。電流検出抵抗R20には、流れる電流に応じた検出電圧を発生する。コンパレータCP51は、検出電圧をしきい値と比較し、その比較結果から検出電圧の上下に応じた周波数信号を出力する。
(もっと読む)
超音波モータ
【課題】単板の圧電振動子を従来とは異なる辺比で構成すると共に、これを積層した超音波モータを提供する。
【解決手段】矩形で単板の圧電振動子を積層して積層型圧電振動子50を構成し、積層型圧電振動子が、第一次縦振動モードと第二次屈曲振動モードとを組み合わせた多重振動モードで振動することにより駆動力を発生する超音波モータであって、単板の圧電振動子が第一次縦振動モードで振動する際の伸縮方向の長さをLとし、単板の圧電振動子が第二次屈曲振動モードで振動する際の剪断方向の長さをdとした場合、単板の圧電振動子は、d/Lの値が実質的に0.63となるように形成されていると共に、単板の圧電振動子は、剪断方向に複数積層されている。
(もっと読む)
振動アクチュエータ、レンズ鏡筒およびカメラ
【課題】小型化を損なわず、異物侵入に対処し、かつモータの駆動による温度上昇を低減した振動アクチュエータを提供する。
【解決手段】本発明の振動アクチュエータ(201,202,203,204)は、電気エネルギーを機械エネルギーに変換する電気機械変換素子(13)により振動波を生じる振動体(12)と、該前記振動体(12)と加圧接触する接触面(15a)を有し、前記振動波によって前記接触面(15a)が駆動されることにより前記振動体(12)に対して回転移動する第1の回転移動部材(15)と、前記第1の回転移動部材(15)の回転に応じて回転し、かつ前記接触面(15a)の外周側を覆うカバー部材(30,40,50,60,70)と、を備えること、を特徴とする。
(もっと読む)
高電圧出力ドライバー
【課題】駆動周波数信号であるFG信号を効果的に発生する。
【解決手段】駆動波形発生手段(D/Aコンバータ)に用いられるカウンタ32の特定の出力を利用してFG信号を作成する。これにより、(D/Aコンバータ)が負荷を駆動する交流の駆動波形を発生する。この駆動波形に基づき周波数信号発生手段(FF)51が負荷駆動についての周波数信号を発生する。
(もっと読む)
共振超音波ピエゾインジェクタを制御する装置及び方法
本発明は、共振超音波圧電素子駆動段(1)を制御する装置に関するものであり、前記装置は:DC電圧(VBATT)を中間DC電圧(Vinter)に昇圧する第1段(2)と、第2変換段(3)を備え、前記第2段は、前記中間DC電圧に接続されるインダクタ(Lp)と、第1スイッチングトランジスタ(M)を含み、前記第1スイッチングトランジスタは、前記インダクタを充電するフェーズ、及び前記インダクタに蓄積されるエネルギーを第1指令パルス列(V1)に応答して転移するフェーズを選択的に制御することにより、前記圧電素子駆動段の励磁電圧(VE)を生成し、前記第2段は、前記第1トランジスタのドレインと前記インダクタの一方の端子との間に直列接続される第2スイッチングトランジスタ(M’)を含み、前記第2スイッチングトランジスタは、前記充電フェーズ中に前記インダクタに蓄積されるエネルギーを第2指令パルス列(V2)に応答して制限することにより、前記励磁電圧の振幅を減少させるために適することを特徴とする。  (もっと読む)
(もっと読む)
超音波モータ
【課題】エンコーダなどのセンサを用いることなく、移動体の回転位置や回転速度の検出が可能なセルフセンシング方式の超音波モータにおいて、駆動性能の低下を抑える。
【解決手段】振動体(ステータ)は圧電素子12aの振動によって移動体(ロータ)を駆動し、その移動体に形成した溝を振動体の接触部が通過する際の検出電極ISからの出力変化で移動体の回転位置を検出するにあたって、振幅検出部28は検出電極ISからの出力振幅を検出し、偏差算出部29が、理想振幅値(最適駆動の振幅値)との偏差を演算し、その演算結果に応じて制御部24が駆動電圧発生部25の発振周波数を変化させる。したがって、溝の無い通常域の通過時には通常の共振周波数で振動させ、溝の有る検出域の通過時には振動周波数を低下させて共振周波数にマッチさせ、駆動性能(トルク)の低下を抑えることができる。回転位置は、位置検出部30が、駆動周波数の変化から検出する。
(もっと読む)
駆動装置及びその制御方法、並びに電子機器
【課題】停止時の振動波モータの消費電力を削減し、更に、ギアの歯飛びや歯面の欠けの発生を防止することができる駆動装置を提供する。
【解決手段】パンチルトカメラ100は、カメラ部102、パンユニット115、振動波モータ103、110、エンコーダセンサ106、113、エンコーダスケール107、114を備える。振動波モータ103、110は、圧電素子7、振動子2、スライダ部材3、ロータ4、シャフト10を備える。振動波モータ103の停止直後に使用者が手動でカメラ部102或いはパンユニット115を回転させた場合、エンコーダセンサ106(113)でエンコーダパルスが検出される。制御部20は、電圧制御発振器23から定在波に対応したパルス信号を発生させ、駆動パルス発生器24を介してドライバA25、ドライバB26に供給する。しかし、振動波モータ103を停止してから所定時間経過後はエンコーダセンサ106(113)による検出を中止する。
(もっと読む)
41 - 60 / 174
[ Back to top ]