
国際特許分類[B25J17/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | 接続部 (479)
国際特許分類[B25J17/00]の下位に属する分類
手首ジョイント (167)
国際特許分類[B25J17/00]に分類される特許
31 - 40 / 312
ロボット、ロボットシステムおよび回転電機
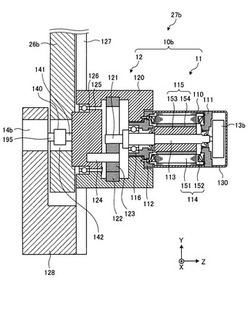
【課題】モータの駆動力をリンクに伝達する減速機の出力軸の回転角度をより精度よく検出すること。
【解決手段】モータ11と、モータ11の駆動力をリンクである下部アーム26bに伝達する減速機12と、減速機12の出力軸125の回転角度を検出するエンコーダ14bとを備える。そして、第2のエンコーダ14bは、減速機12の出力軸125に軸継手140を介して連結される。かかる第2のエンコーダ14bの検出結果に基づいてモータ11の位置指令が補正される。
(もっと読む)
マニピュレータ用関節部

【課題】作業効率の向上と組立てコストの低減化を図り、高精度のマニピュレータ動作を行うことができる小型のマニピュレータ用関節部を提供する。
【解決手段】軸受ユニット8のハウジング14には、ハウジング14の回転中心O2を通り径方向に延びる直線と略直交する平坦面14bが形成され、回動アームのユニット装着孔7には、外径側に窪む係止凹部7aが形成されている。ハウジング14の平坦面14bとユニット装着孔7の係止凹部7aとの間には、板状の係止部材30が設けられて、ハウジング14がユニット装着孔7に回転不能に固定される。
(もっと読む)
ロボット
【課題】 減速機の温度が上昇しても減速機収納室の内圧が上昇することを防止して、減速機収納室内の潤滑剤が外部に流出することを防止できるロボットを提供すること。
【解決手段】 スカラロボットAにおいて、駆動装置32をフレーム部材31に連結固定し、駆動装置32によって駆動される減速機33の出力部35をフレーム部材21に連結固定して、フレーム部材21に対してフレーム部材31を回転可能に組み付けるとともに、減速機33を収納する減速機収納室内に潤滑剤を充填した。そして、潤滑剤の上面より上方となる減速機収納室の空間部33bの所定部から、この所定部より上方の上方点まで延びて減速機収納室を外部に連通させる圧抜き経路38とエアチューブ39をフレーム部材31に設け、エアチューブ39の途中にコイル部39aを形成した。
(もっと読む)
ロボット及びロボットシステム
【課題】ロボットの制御性と安全性とを両立させる。
【解決手段】ロボットは、固定子31及び回転子を有するモータを関節機構S1に備えている。このロボットは、モータの固定子31が連結される第1リンク部材L1と、モータの回転子が連結される第2リンク部材と、モータの固定子31と第1リンク部材との間に設けられた弾性部材30とを有している。そして、この弾性部材30は、磁場によって弾性率が変化する可変弾性ソフトマテリアルで構成されている。
(もっと読む)
電気機械装置およびそれを用いたアクチュエーター、モーター、ロボット、ロボットハンド。
【課題】電気機械装置を小型化する技術を提供する。
【解決手段】電気機械装置の一種である動力発生装置100は、中心軸110と、永久磁
石123を有するローター121と、ローター121の外周に配置されたステーターであ
る電磁コイル124と、ローター121に連結され、回転駆動力の伝達に用いられる回転
機構部130と、前記回転機構と負荷とを接続する負荷接続部133とを備える。ロータ
ー121には、中心軸110と永久磁石123との間において、少なくとも中心軸110
の軸方向の一方に開口し、回転機構部130の少なくとも一部を収容する収容空間として
の凹部1212が形成されている。回転機構部130は、ローターと接続または一体に形
成される入力部と、ステーターと接続または一体に形成される固定部と、負荷接続部13
3と接続または一体に形成される出力部とを有する。
(もっと読む)
コアレスモーター、コアレスモーターを搭載したロボットハンド、およびロボット
【課題】巻線効率が高く、且つ、高トルクなコアレスモーターを提供する。
【解決手段】中空の空芯巻線の内側に、円筒形状の永久磁石を設けてコアレスモーターを
構成する。また空芯巻線は、電線を菱形形状に巻回することによって形成する。そして、
菱形形状の一方の対角線は永久磁石の中心軸と平行とし、他方の対角線は、永久磁石の中
心軸に対して、永久磁石の磁極が切り換わる角度の1.2倍から1.6倍の角度範囲とな
る長さに設定する。こうすれば、菱形形状に巻回して空芯巻線を構成するコアレスモータ
ーの回転トルクを向上させることができる。また、電線が菱形形状に巻回されているので
、高い巻線効率を実現することが可能となる。
(もっと読む)
ロボットハンドの挟み込み軽減機構及びロボットハンド
【課題】高い安全性と大きな指先力を確保できるロボットハンドの挟み込み軽減機構を提供する。
【解決手段】本発明の一形態に係るロボットハンドの挟み込み軽減機構1は、駆動機構6から伝達される駆動力によって開閉する一対のハンド部2を備えるロボットハンドの挟み込み軽減機構であって、ハンド部2が開方向に回転駆動するときのみ、ハンド部2に所定の大きさの負荷が作用すると、駆動機構6からハンド部2への駆動力の伝達を減少させる過負荷軽減機構7を備える。
(もっと読む)
関節駆動装置
【課題】人工筋肉アクチュエータを動力源とする筋骨格型ロボット等の関節駆動装置において、装置全体を大型化することなく、可動範囲の広範化及び所定の可動範囲での高出力化が可能な関節駆動装置を提供すること。
【解決手段】支持軸32に回転自在に支持されるプーリ4と、支持軸32に回動自在に支持されるリンク部6と、第1人工筋肉2a及び第2人工筋肉2bを有し、第1人工筋肉2a及び第2人工筋肉2bの拮抗筋運動による収縮量の差により、プーリ4を回転させる人工筋肉アクチュエータ2と、を備えた関節駆動装置1において、リンク部6の回転角度を検出する原点センサと、リンク部6をプーリ4に接続させて、回転駆動力を伝達する接続クラッチ7と、を備え、人工筋肉アクチュエータ2により所定の回転角度に回転されたプーリ4と所定の回動位置に位置するリンク部6とを接続して、リンク部6のプーリに対する相対的な回動範囲を切り替える。
(もっと読む)
多関節ロボットおよびロボット関節構造
【課題】バックラッシュによるガタツキを抑制することにより、関節部を精度よく動作させることが可能な多関節ロボットを提供する。
【解決手段】この多関節ロボット100は、骨格フレーム21側に設けられ、互いに対向するように配置されるとともに、曲げ軸L4を回動中心として互いに独立して回動可能な一対の入力側傘歯車62と、一対の入力側傘歯車62の両方に噛み合うように骨格フレーム31側に設けられ、一対の入力側傘歯車62が回動することによって、回動軸L3を回動中心として回動可能であるとともに曲げ軸L4回りに揺動可能な出力側傘歯車63と、一対の入力側傘歯車62の両方に噛み合った状態で出力側傘歯車63を回動軸L3回りの一方の回動方向に付勢する定荷重バネ64とを含む。
(もっと読む)
マニピュレータ用関節部
【課題】組立てが容易でコストの低減化を図り、高精度のマニピュレータ動作を行うことができる小型のマニピュレータ用関節部を提供する。
【解決手段】マニピュレータ用関節部は、基部アームの端部に配設された関節軸と、回動アームの端部に形成されたユニット装着孔と、該ユニット装着孔に嵌合するハウジングと該ハウジングの内部に配設され回動アームを関節軸に対して回転自在に支持する転がり軸受とを有する軸受ユニットと、を備える。更に、長手方向における縦断面がテーパー状の係止部材は楔作用を発生し、回動アームとハウジングとを相対回転不能に固定する。係止部材は円周方向に複数本設けられている。
(もっと読む)
31 - 40 / 312
[ Back to top ]