
国際特許分類[B25J17/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | 接続部 (479)
国際特許分類[B25J17/00]の下位に属する分類
手首ジョイント (167)
国際特許分類[B25J17/00]に分類される特許
51 - 60 / 312
駆動装置
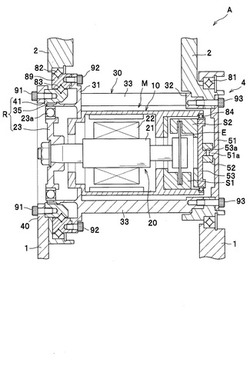
【課題】変形可能な変形機械要素を介して動力が伝達される装置における、変形機械要素の変形量を高精度に取得する。
【解決手段】回転子20と結合された第1アーム1と、固定子10と結合された第2アーム2と、固定子10と第2アーム2の間に設けられた弾性部材30と、回転子20に設けられたエンコーダ板Eと、固定子10に設けられ、エンコーダ板Eの符号を検出する第1フォトセンサS1と、第2アーム2に設けられたエンコーダ板Eの符号を検出する第2フォトセンサS2とを備えて、駆動装置を構成する。
(もっと読む)
モータ装置、回転子の駆動方法及びロボット装置

【課題】高トルクを発生させること。
【解決手段】回転子と、当該回転子の外周の少なくとも一部に掛けられた伝達部と、回転子と伝達部との間を回転力伝達状態として伝達部を一定距離移動させると共に回転力伝達状態を解消した状態で前記伝達部を所定位置に復帰させる駆動部と、前記伝達部及び前記駆動部のうち少なくとも一方を冷却する冷却部とを備える。
(もっと読む)
モータ装置及び回転子の駆動方法並びにロボット装置
【課題】高トルクを発生させることができるモータ装置を提供する。
【解決手段】回転子と、回転子の外周の少なくとも一部に掛けられた伝達部と、伝達部に接続され、印加された駆動電圧に応じて伝達部を移動させる複数の駆動部と、回転子と伝達部との間を回転力伝達状態とする保持力に対応する第1駆動波形を備える第1駆動電圧と、伝達部を移動させる駆動力に対応する第2駆動波形を備える第2駆動電圧とを複数の駆動部にそれぞれ印加させて、回転子と伝達部との間を回転力伝達状態として伝達部を一定距離移動させる駆動動作及び回転力伝達状態を解消した状態で伝達部を所定の位置に戻す復帰動作を駆動部に行わせる制御部と、を備える。
(もっと読む)
モータ装置、回転子の駆動方法及びロボット装置
【課題】高トルクを発生させること。
【解決手段】回転子と、当該回転子の外周の少なくとも一部に掛けられた伝達部と、回転子と伝達部との間を回転力伝達状態として伝達部を一定距離移動させると共に回転力伝達状態を解消した状態で伝達部を所定位置に復帰させる駆動部と、伝達部及び駆動部の少なくとも一方の振動を減衰させる弾性部とを備える。
(もっと読む)
同軸複数軸出力機構
【課題】 偏心揺動型減速機を用い、構造の簡単な同軸複数軸(2軸以上)の出力を取り出せるようにした同軸複数軸出力機構を提供する。
【解決手段】 偏心体軸(71)と、偏心体軸に設けられた偏心体(72)と、偏心体が貫通し、偏心体の回転により揺動回転される内歯揺動体(75)と、内歯揺動体と噛合する外歯歯車(15、25)とからなる複数組の偏心揺動型減速機(70)および前記偏心揺動型減速機の組数と同数の同軸状に配置された出力軸(12、22)からなり、前記複数組の偏心揺動型減速機の外歯歯車が軸線方向に間隔を開けて対応する各出力軸に取着されており、前記複数組の偏心揺動型減速機の偏心体軸を回転自在に支持する支持体(31)を固定して、偏心体軸から回転を入力し、外歯歯車から複数の出力軸へ同軸出力可能とした。
(もっと読む)
多様な関節の形に適用可能なアクチュエータモジュール
【課題】多関節ロボットの関節部に利用されるアクチュエータにおいて、減速機とアクチュエータ本体を多様に配置することが出来て多様な関節の形に適用可能なモジュール構造を提供する。
【解決手段】アクチュエータモジュールは、電子部と駆動部が含まれ構成されたアクチュエータ本体100と分離・結合された減速機200が具備され、アクチュエータモジュール本体の1次減速によって得られた速度とトルクを2次減速機を通して変更することが容易であり、減速機がアクチュエータ本体と分離・結合されるため、多様な形の減速機を適用することが出来、減速機とアクチュエータ本体を多様に配置することが出来て多様な関節の形に適用可能であり、前記アクチュエータモジュールを利用して多様な関節構造を形成することが出来る。
(もっと読む)
調整ユニット
【課題】簡易な構成でワイヤの剛性を調整できるとともに、ワイヤに対して簡単に取り付けることができる調整ユニットを提供できるようにすることを目的とする。
【解決手段】調整ユニット10では、第2の支持部材12の挿通孔31と、圧縮コイルばね13の空芯領域G2とを通過させたワイヤWの湾曲部W1を、第1の支持部材11の係止部23に係止させるようにしたことで、分品点数が少なく簡易な構成でワイヤの剛性を調整できるとともに、ワイヤWを張架させた状態のまま、当該ワイヤWに対して簡単に取り付けることができる。
(もっと読む)
電動アクチュエーター
【課題】電動アクチュエーターの握力トルクを高めることを目的とする。
【解決手段】電動アクチュエーターであって、回転運動をする電動駆動部200と、前記電動駆動部に接続される直進運動機構であって、前記電動駆動部と接続される第1のネジ部230と、前記第1のネジ部と嵌合する第2のネジ部240を有し、前記第1のネジ部に加えられる回転運動を前記第2のネジ部の直線運動に変換する直進運動機構と、屈曲可能な屈曲機構(101〜104、111〜113)と、前記屈曲機構と前記第2のネジ部とを連結し、前記第2のネジ部の直線運動に基づいて前記屈曲機構を屈曲させる連結部材130と、を備える。
(もっと読む)
駆動力伝達機構及びマニピュレータシステム
【課題】湾曲動作時に動力伝達部材の伝達効率が低下しない(伝達特性が悪化しない)駆動力伝達機構及び該駆動力伝達機構を具備するマニピュレータシステムを提供すること。
【解決手段】駆動源からの駆動力を伝達する駆動力伝達機構1を次のように構成する。すなわち、線状或いは棒状で可撓性を有する操作ワイヤ95,96と、操作ワイヤ95,96が挿通された可撓性を有する案内部材である内側パイプ2と、内側パイプ2の径方向外側に設けられ、内側パイプ2の変形を抑制する外側パイプ3と、を駆動力伝達機構1に具備させる。
(もっと読む)
リンク作動装置
【課題】 可動部が自由度機構として構成され、可動部の可動範囲が広く、可動部が軽量で、可動部の位置決め精度が高いリンク作動装置を提供する。
【解決手段】 入力部材104に対し出力部材105を、3組以上のリンク機構101を介して姿勢を変更可能に連結する。リンク機構101は、入力側および出力側の端部リンク部材101a,101cと中央リンク部材101bとでなる。リンク機構101は、各リンク部材101a,101b,101cを直線で表現した幾何学モデルが、中央リンク部材101bの中央部に対する入力側部分と出力側部分とが対称を成す形状である。リンク機構用駆動源121により2組以上のリンク機構101を動作させて、出力部材105の姿勢を制御する。各リンク機構101の配置の内側に通して、可撓性を有し入力部材104および出力部材105の並び方向に回転力を伝達する可撓性ワイヤ4Aを設ける。
(もっと読む)
51 - 60 / 312
[ Back to top ]