
国際特許分類[B25J17/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | 接続部 (479)
国際特許分類[B25J17/00]の下位に属する分類
手首ジョイント (167)
国際特許分類[B25J17/00]に分類される特許
41 - 50 / 312
関節駆動機構
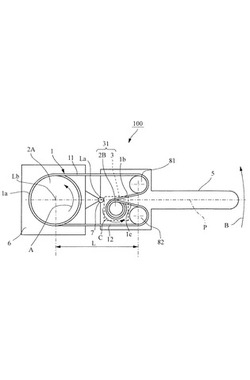
【課題】低剛性から高剛性まで幅広く関節剛性を調整する。
【解決手段】ベース部材6に対してリンク部5が揺動軸心La回りに揺動可能に連結されている。ベース部材6には駆動プーリ2Aが設けられている。リンク部5には一対の従動プーリ81,82が設けられている。紐状弾性部材1は、その中央部1aが駆動プーリ2Aに架けられ、各端部1b,1cが各従動プーリ81,82に架けられている。紐状弾性部材1の両端部1b,1cは、調整機構31の剛性調整用駆動プーリ2Bに巻き取られて駆動プーリ2A側に引っ張られ、剛性調整用駆動プーリ2Bを回転駆動することで、紐状弾性部材1の駆動プーリ2Aと各従動プーリ81,82との間の有効長さが調整される。
(もっと読む)
マニピュレータ用関節部

【課題】組立てが容易でコストの低減化を図り、高精度のマニピュレータ動作を行うことができる小型のマニピュレータ用関節部を提供する。
【解決手段】マニピュレータ用関節部は、基部アームの端部に配設された関節軸と、回動アーム4の端部に形成されたユニット装着孔と、該ユニット装着孔に嵌合するハウジングと該ハウジングの内部に配設され回動アームを関節軸に対して回転自在に支持する複列の転がり軸受とを有する軸受ユニット7と、を備える。更に、長手方向における縦断面がテーパー状の係止部材14は楔作用を発生し、回動アームとハウジングとを相対回転不能に固定する。
(もっと読む)
リンク作動装置
【課題】 コンパクトでありながら、可動部の可動範囲が広く、かつ姿勢調整精度が高く、しかも剛性が高いリンク作動装置を提供する。
【解決手段】 入力部材14に対し出力部材15を、3組以上のリンク機構11を介して姿勢を変更可能に連結する。リンク機構11は、入力側および出力側の端部リンク部材11a,11cと、中央リンク部材11bとでなる。リンク機構11は、各リンク部材11a,11b,11cを直線で表現した幾何学モデルが、中央リンク部材11bの中央部に対する入力側部分と出力側部分とが対称を成す形状である。3組以上のリンク機構11のすべてに、入力部材14に対して出力部材15を任意の姿勢で静止させることが可能な静止機構4を設ける。また、入力部材14および出力部材15にそれぞれ形成された被接触部に接触して入力部材14と出力部材15とを互いに連結する構造体5を設ける。
(もっと読む)
マニピュレータ用関節部
【課題】組立てが容易でコストの低減化を図り、高精度のマニピュレータ動作を行うことができる小型のマニピュレータ用関節部を提供する。
【解決手段】マニピュレータ用関節部は、基部アームの端部に配設された関節軸と、回動アームの端部に形成されたユニット装着孔と、該ユニット装着孔に嵌合するハウジングと該ハウジングの内部に配設され回動アームを関節軸に対して回転自在に支持する複列の転がり軸受とを有する軸受ユニットと、を備える。ハウジングの外周面には、軸方向に沿う係止溝が形成されており、回動アームのユニット装着孔には、ハウジング側の係止溝と同形状の係止溝が形成され、両係止溝の間に係止部材が配置されている。
(もっと読む)
アクチュエータ装置およびこれを用いるロボット装置
【課題】定常的に大きな負荷が作用した場合にも効率を損なわず、柔軟な動作と周囲に対する安全を確保できるアクチュエータ装置を提供する。
【解決手段】ロボット装置やパワーアシスト装置の関節駆動に用いられるアクチュエータ機構において、選択的に駆動制御されるモータ11と、バネ要素20と、モータ駆動によりバネ要素の発生力および/またはその向きを変化させる変更機構と、バネ要素に接続された出力端22とを設けて構成する。一実施例の変更機構は、モータ駆動によって傾斜量が変化する傾斜レール16を具えるとともに、バネ要素は傾斜レールの傾斜方向へその角度に応じた力を発生し、これにより出力端が前記傾斜レールの角度に応じた力でその傾斜方向に付勢される。
(もっと読む)
ロボット及びその製造方法
【課題】樹脂で形成された加工精度の高い軽量なロボットアームを備えたロボットを提供する。
【解決手段】第1アーム10に連結された第1アクチュエータ20と、第1アクチュエータ20を収容する第1収容部105を有する関節フレーム100を備え、第1収容部105は、樹脂Aの硬化物により形成された基礎フレーム101と、樹脂Aの硬化物よりも高い融解温度を有する樹脂Bの硬化物により形成された第1フレーム102とを接合して構成され、第1アクチュエータ20は、第1フレーム102に固定される。
(もっと読む)
装着型動作支援装置
【課題】動作時に身体の装着部に対するずれ動きを最小限に抑えるようにする。
【解決手段】装着型動作支援装置SUは、肘関節A3を挟む上腕部A1に装着される第1サポート部材10と、前腕部A2に装着されると共に第1サポート部材10に連結され、肘関節A3の屈曲動作に合わせて姿勢変位可能な第2サポート部材12とを備える。第2サポート部材12は、前腕部A2に装着される前腕装着部45を備え、この前腕装着部45は、前腕部A2の最も細い部位である関節骨格部位A7に保持される保持部51を備える。また前腕装着部45は、肘関節A3から手首関節A4に近づくにつれて捻れた形状に形成され、前腕部A2を包み込むように装着される。前腕装着部45の前腕部A2に臨む内側面にノンスリップ加工が施されており、前腕部A2に対して前腕装着部45が滑り難くなっている。
(もっと読む)
ロボットおよび2台以上のロボットの組み立て方法
【課題】個体差を小さくすることが可能なロボットを提供する。
【解決手段】このロボット100は、アーム支持部2と、アーム支持部2に関節部を介して連結される下腕部3と、関節部に配置され、下腕部3をアーム支持部2に対して回動可能に連結し、偏心ギア77a(77b)が噛み合い位置を移動させながら回転する減速機7bと、アーム支持部2に対する下腕部3の相対的な回転位置が所定の位置にあるとき、減速機7bの回転角度位置が所定の回転角度位置となるように位置合わせ可能な位置決め部21b、71d、72eおよび3bとを備える。
(もっと読む)
関節構造、及びその関節構造を備えたロボット
【課題】第1の部材に対する第2の部材の相対的な角度に応じて、伝動ベルトのテンションが増減する技術を提供する。
【解決手段】第1実施形態に係る関節構造Jは、関節軸Cを有する体幹部2と、体幹部2の関節軸C回りに回転可能となるように体幹部2によって支持される上腕部5と、体幹部2に回転可能に設けられ、肩関節駆動モータ34(駆動源)によって回転駆動される駆動プーリ11と、上腕部5に回転不能に設けられる従動プーリ12と、駆動プーリ11と従動プーリ12の間に掛けられる平ベルト13(伝動ベルト)と、を備えている。従動プーリ12の外周12aは略円形である。従動プーリ12の中心軸Dは、関節軸Cからずれている。
(もっと読む)
ロボットのリンク装置
【課題】ロボットの歩行脚またはアームとして機能するロボットのリンク装置において、関節にガタなどを設けても、高精度に、第1のリンクに対する第2のリンクの回転角を制御できるようにする。
【解決手段】歩行脚またはアームを構成する第1および第2のリンク3、5と、リンク3、5を連結する関節7とを備える。関節は、第1および第2の関節部7a、7bを有する。第1および第2の関節部は、リンク3、5の一方に対し衝撃吸収用のガタをもって取り付けられ、リンク3、5との他方に対し関節の軸周りに回転可能に取り付けられる。第1および第2のモータ9、11は、第1および第2の関節部を同じ方向に回転駆動することで、第1のリンクに対し第2のリンクを回転させ、第1および第2の関節部を逆方向に回転駆動することで、回転方向のガタの大きさを調整する。
(もっと読む)
41 - 50 / 312
[ Back to top ]