
Fターム[3C007DS01]の内容
マニピュレータ、ロボット (46,145) | 把持装置の全体構成 (1,374) | 単一の挟持装置又は吸着装置 (1,104)
Fターム[3C007DS01]の下位に属するFターム
複数の把持部を有するもの (214)
Fターム[3C007DS01]に分類される特許
41 - 60 / 890
荷搬送アームおよび荷搬送アームを備えた荷搬送ロボット
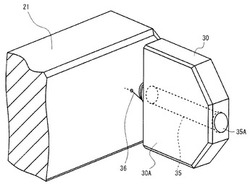
【目的】複雑な制御を必要とせず荷物を傷つけずに保持できる荷搬送アームおよび荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体には、左右一対のアームを設け、アームの前腕21には、荷を当接支持する手先部30を軸35に回転可能に設けた。手先部30は、荷に当接する当接面30Aを有し、当接面30Aを前腕21の長手方向に垂直に付勢するねじりコイルバネ36の一端を固定し、ねじりコイルバネ36の他端は前腕21に固定されている。荷搬送ロボットは、荷の表面に当接面30Aを当接させるように前腕21を可動させ、荷の表面の向きに合わせて手先部30を軸35を中心に回転させる。当接面30A全体を荷の表面に当接させた状態で、前腕21を可動させ、手先部30を介して軸35にて荷の荷重を受けて、荷を移動させる。
(もっと読む)
基板位置検出方法

【課題】搬送ロボットにより基板を搬送する際に、ハンド上の基板の中心位置の検出精度を向上できるようにした基板位置検出方法を提供する。
【解決手段】ハンド7に、搬送経路上の所定位置に設定した検出点PSに基板の周縁があるか否かを検出するセンサで検出可能な指標として、R方向に所定距離LR0離れた第1指標73と第2指標74とを設ける。第1指標73が検出点にあると検出されたときのロボット動作量から求めたハンドのR方向位置を基準位置として、基準位置から、第2指標74が検出点にあると検出されたときのロボット動作量から求めたハンドのR方向位置までの変位量LRを算出し、この変位量LRと指標73,74間の距離LR0との比を補正係数として算出する。そして、基板の周縁の各箇所が検出点にあると検出されたときのロボット動作量から求めたハンドのR方向位置を、当該R方向位置と基準位置との偏差に補正係数を乗算して補正する。
(もっと読む)
作業システムおよび作業方法
【課題】沸騰水型原子炉のジェットポンプ近傍などの狭隘な領域に設置された配管の溶接部の洗浄、点検、検査予防保全、補修などの作業を容易に行えるようにする。
【解決手段】作業システムに、ベース24と、ベース24を水平に対して傾斜させる第1ロータリシリンダ27と、ベース24を上下に移動させる伸縮ガイド19と、アーム20と、アーム20を回動させる回転ローラ25と、アーム20に取り付けられた検査プローブ23とを備える。アーム20は、リンク22で結合された複数の部分からなる。アーム20は、隣り合う部分を結合するエアシリンダ21の伸縮により、その形状が変化する。
(もっと読む)
容器搬送装置
【課題】容器搬送装置において、容器に貼付されたラベル等の一部が剥がれてその剥がれ部分がマニピュレータに付着している場合や容器の外側に粘着剤が残留しておりそれによって容器側面がマニピュレータに付着している場合に、マニピュレータを開動作させても容器がマニピュレータから離れないことがあった。
【解決手段】マニピュレータ20Aを下降させて、それを開動作させて容器を離した後、そのままマニピュレータ20Aを再下降させる。これにより付着状態が強制的に解消される。その後、マニピュレータ20Aが上方へ引き上げられる。その途中でマニピュレータ20Aの閉動作が実行され、容器26Aの不存在が確認される。マニピュレータ20Aの開動作の開始後に開動作完了を待たずに再下降を開始させてもよい。
(もっと読む)
ワーク搬送方法および装置
【課題】姿勢矯正手段を用いる必要なしに、ワークを常に適正に、かつ十分強固に把持して、所期した通りの姿勢で所定の作業ステーションまで、ワークを常に確実に搬送することができるワーク搬送方法を提供する。
【解決手段】中空もしくは中実の軸部3と、軸部3の中間部に設けられたフランジ部4とを具え、基準面1上に載置されるワーク2の、フランジ部4を基準面1と直交する向きに押圧して、該フランジ部4の周面を基準面1上に線もしくは面接触させて、前記軸部3の中心軸線を基準面1に平行にした状態で、開閉駆動される一対のフィンガー12,12により、ワーク2のフランジ部4の周面を把持して、該ワーク2を所定の作業ステーションまで搬送する。
(もっと読む)
照明ランプ交換方法及び交換治具
【課題】核燃料セル内の照明装置の維持管理費を低減するために照明ランプの交換を容易に行える交換治具を提供する。
【解決手段】照明ランプ56の交換治具は、マスタスレーブマニピュレータによって把持される把持部82と、照明ランプ56の外周を弾性的に把持することにより保持する弾性把持筒81より構成される。弾性把持筒81は、スリット812を有する弾性を持ったゴム板811を巻き付けて、天板821の端面にネジ止め83で固定する。照明ランプの交換時は、弾性把持筒81を照明ランプ56に挿入して照明ランプの外周を比較的弱い力で弾性的に把持する。
(もっと読む)
荷搬送ロボット
【目的】荷物を安定して支持することができる荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体16には、左右一対のアーム17を設けるとともに荷物の下面を支持するための台座部25を突出するように設けた。アーム17は本体16に対し、2つの回転軸にて回転可能な肩18と、肩18に対し1つの回転軸にて回転可能な中腕20と、中腕20に対し1つの回転軸にて回転可能な前腕21とを有している。また前腕21の先端には荷を当接支持する手先部30を設けた。アーム17は肩18、上腕19、中腕20、前腕21を介して手先部30を変位させて荷物を本体16に引寄せるように移動させるとともに、台座部25の上面を荷物の下面に位置させる。荷搬送ロボットは、手先部30にて荷物を当接支持するとともに、台座部25にて荷物の下面を支持するため、荷物を安定して支持することができる。
(もっと読む)
義指
【課題】第一部材と第二部材とを大きな力で回動できるようにする。
【解決手段】末節骨に該当する第一部材2と中節骨に該当する第二部材3と基節骨に該当する第三部4材と中手骨に該当する第四部材5とをそれぞれ回動自在に軸支する。そして、第一部材2と第二部材3との第一連結点2a・3aを掌側に配置し、第二部材3と第三部材4との第二連結点3b・4aを手の甲側に配置する。そして、第一部材2と第三部材4とを接続する第一連結部材7と、第二部材3と第四部材5とを接続する第二連結部材8とを設け、第一部材2と第一連結部材7との第一連結部2b・7aを手の甲側に配置し、第二部材3と第二連結部材8との第二連結部3c・8aを掌側に配置した。
(もっと読む)
保持部材の姿勢判定装置、その方法、基板処理装置及び記憶媒体
【課題】 保持部材の姿勢に異常があるか否かを確実かつ容易に検出すること。
【解決手段】 保持部材であるフォーク3Aを前進させたときに、当該フォーク3Aがその前を通過するように、フォーク3Aの進行方向に対して側方にラインセンサ4を設ける。そして、フォーク3Aをラインセンサ4に対して進退させたときに、当該フォーク3Aの上下方向の位置と、フォーク3Aの進退方向の位置とを対応付けたデータを取得する。この取得されたデータに基づいて前記進退方向の位置に対して上下方向の位置を二次微分した値を演算し、この値に基づいて保持部材の姿勢の異常の有無を判定する。
(もっと読む)
把持装置及びロボット装置
【課題】一対のフィンガーの把持動作に用いられる回転駆動源を、一対のフィンガーの回転駆動に兼用する。
【解決手段】モータ5は、フレーム6から回転軸5bが突出するようにフレーム6に収容されている。回転軸5bには、ピニオン7が固定されている。また、フレーム6に対してグリッパ基台12が回転可能に設けられている。一対のラック10,10が、グリッパ基台12に支持されて、ピニオン7を間に挟んでピニオン7に噛み合っている。一対のラック10,10には、フィンガー4,4が固定されている。フレーム6には、グリッパ基台12の回転を規制するロック機構14が設けられている。ロック機構14は、一対のラック10,10の移動が規制されると、グリッパ基台12への係止が解除され、グリッパ基台12の回転が許容される。
(もっと読む)
荷搬送ロボット
【目的】荷物を安定して支持することができる荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体16には、左右一対のアーム17を設けるとともに荷物の下面を支持するための台座部25を突出するように設けた。アーム17は本体16に対し、2つの回転軸にて回転可能な肩18と、肩18に対し1つの回転軸にて回転可能な中腕20と、中腕20に対し1つの回転軸にて回転可能な前腕21とを有している。また前腕21の先端には荷を当接支持する手先部30を設けた。アーム17は肩18、上腕19、中腕20、前腕21を介して手先部30を変位させて荷物を本体16に引寄せるように移動させるとともに、台座部25の上面を荷物の下面に位置させる。荷搬送ロボットは、手先部30にて荷物を当接支持するとともに、台座部25にて荷物の下面を支持するため、荷物を安定して支持することができる。
(もっと読む)
把持装置
【課題】当接部の挟圧方向に対する厚みをより大きくして、従来に比して把持力を高めた把持装置を提供する。
【解決手段】複数の爪部4・5と、弾性素材からなる袋状部材6aと、該袋状部材6aに充填される粒状物6bとを備え、各爪部4・5のワーク50と当接する部位に付設される複数の当接部6・6・・・と、を有し、各爪部4・5を変位させることにより、各当接部6・6・・・によりワーク50を挟圧し、ワーク50を挟圧した状態で、袋状部材6aの内容積に対する粒状物6bの体積比率を増大させることにより、粒状物6bを、任意の形状を保持しつつ硬化させて、ワーク50の把持を行う把持部2を備える把持装置1であって、把持部2は、当接部6を構成する袋状部材6aのワーク50と当接する部位である正面部6cに連続し、かつ、該正面部6cに略直交して形成される部位である側面部6dの位置を規制するための規制部材9(保持枠9a)を備える。
(もっと読む)
ハンド、ロボット及びロボットシステム
【課題】把持したボルトをシームレスにタップ穴に挿入することが可能なハンド、ロボット及びロボットシステムを提供する。
【解決手段】ハンド20は、第1のフレーム25aに設けられ、ボルトBを把持する1対の把持爪21a、21bを揺動軸AXp回りに揺動させる揺動機構29と、第1のフレーム25aに設けられ、各把持爪21a、21bを内側に支持する1対の支持部22a、22bを揺動軸AXpに沿って開閉させる開閉機構28と、把持爪21a、21bが把持したボルトBの軸回りに、第1のフレーム25aを第2のフレーム25bに対して無限回転させるボルト回転機構30と、動作する機構を1)揺動機構28及び開閉機構29又は2)ボルト回転機構30に切り替える切り替え機構32とを備える。
(もっと読む)
ロボット
【課題】対象物を逃がさず且つ確実に決められた位置で把持することが可能なロボットを提供する。
【解決手段】一対の指部12を開閉させて対象物を把持する把持部10Aと、対象物と把持部10Aとを相対移動させる移動装置と、移動装置を制御して把持部10Aを対象物に向けて相対移動させ、対象物の周辺に一対の指部12を配置させた後、把持部10Aを制御して一対の指部12を対象物が載置された載置面と平行な面で開閉させ、対象物の側方から一対の指部12の間に対象物を挟み込ませ、3点以上の接触点で把持部10Aに対象物を把持させる制御装置と、を備えている。
(もっと読む)
ハンド及びロボット
【課題】部品を把持するための腕(アーム)の姿勢変化を小さくすることが可能なハンド及びロボットを提供する。
【解決手段】ハンド35aは、1対の支持部42と、1対の支持部42の内側にそれぞれ支持され、部品を把持する1対の把持爪36と、1対の支持部42を各支持部42の長手方向と交差する揺動軸AXpに沿って開閉させる開閉機構400と、1対の把持爪36を揺動軸AXp回りに揺動させ、把持爪36の先端の向きを変更させる揺動機構500とを備える。
(もっと読む)
把持ハンド、及び搬送装置
【課題】粘着性を有する物質の付着が低減された把持ハンド、及びその把持ハンドを用いた搬送装置を提供することを目的とする。
【解決手段】被把持部材を挟んで把持するハンド部において、ハンド部の少なくとも被把持部材に接触する部分が、基材21と、多孔質層22と、非粘着層23とで構成される。基材21は、粗面処理され、表面に凹凸形状が形成されている。多孔質層22は、基材21の粗面側に形成された複数の微細孔を有する。非粘着層23は、多孔質層22の表面に形成されている。
(もっと読む)
多指ハンドユニットおよびロボット
【課題】骨格フレームの曲げ剛性およびリンク部の収納スペースを維持しながらリンク部の小型化を図ることが可能な多指ハンドユニットを提供する。
【解決手段】この多指ハンドユニット1は、複数の指部10、20および30を備え、少なくとも指部10は、内部に収納部141dが配置される中空の骨格フレーム141を有する根元リンク部14と、根元リンク部14を回動させる関節駆動部11とを含む。
(もっと読む)
部品組み付け装置及び機械部品の製造方法
【課題】エア源を使用することなく、部品を組み付けることが可能な部品組み付け装置及び機械部品の製造方法を提供する。
【解決手段】第1のアーム12aの先端部に第1のハンド51aを有し、第1のハンド51aを用いて第1の部品を保持する第1のロボット11aと、第2のアーム12bの先端部に第2のハンド51bを有し、第2のハンド51bを用いて第1の部品に組み付けられる第2の部品を保持する第2のロボット11bと、を備え、第1のハンド51bは、第1の部品又は第2の部品を上方から押さえる押さえ部材74を有し、第2のハンド51bは、第2の部品に形成された孔に挿入され、第2の部品を保持する支持ピン55、56を有する。
(もっと読む)
基板処理装置及び基板搬送方法並びにその方法を実施するためのプログラムを記憶する記憶媒体
【課題】ピックによる基板保持時に基板の異常を判定することで,異常な基板の搬送処理を続行することによる不具合を未然に防止する。
【解決手段】基板が水平方向に移動しないように規制する規制体420と,押圧体440をスライド駆動させて,ウエハWの端部を規制体に押しつけることによって保持する押圧保持部430と,押圧体を駆動させるとともに,その押圧体の位置情報を出力可能な押圧体駆動部442とを有するピックを備え,このピックの基板保持時に押圧体をスライド駆動させてその押圧体が停止した位置を検出し,その検出位置が異常判定閾値以上にピックの先端側にある場合にはその基板は異常であると判定し,その基板の搬送処理を停止する。
(もっと読む)
ハンド及びロボット
【課題】把持したボルトをタップ穴に挿入することが可能なハンド及びロボットを提供する。
【解決手段】ハンド20は、1対の支持部22a、22bと、1対の支持部22a、22bの内側にそれぞれ支持され、ボルトBを把持する第1及び第2の把持爪21a、21bと、第1及び第2の把持爪21a、21bを各支持部22a、22bの長手方向と交差する揺動軸回りに揺動させ、第1及び第2把持爪21a、21bの先端の向きを変更させる揺動機構29と、第1及び第2の把持爪21a、21bが把持したボルトBをボルトBの軸回りに回転させるボルト回転機構30とを備える。
(もっと読む)
41 - 60 / 890
[ Back to top ]