
Fターム[3C007DS01]の内容
マニピュレータ、ロボット (46,145) | 把持装置の全体構成 (1,374) | 単一の挟持装置又は吸着装置 (1,104)
Fターム[3C007DS01]の下位に属するFターム
複数の把持部を有するもの (214)
Fターム[3C007DS01]に分類される特許
81 - 100 / 890
把持搬送装置
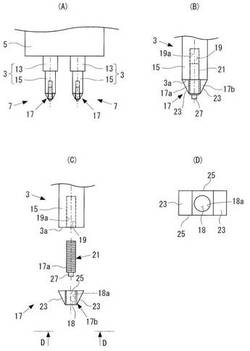
【課題】接触センサ自体が、周囲の物体との干渉要因になり難いようにするとともに、複数の把持爪で対象物を把持する時に、当該対象物もしくはこれの周囲にある物体と当該把持爪との接触を検出できるようにする。
【解決手段】対象物を把持する複数の把持爪3と、把持爪3を動作可能に保持して移動する保持移動体5と、物体との接触を検出する接触センサ7とを備える。接触センサ7は、その一部が把持爪3の内部に配置されるように把持爪3の先端部に組み込まれている。
(もっと読む)
ロボットの駆動装置、ロボットの駆動方法、およびロボット

【課題】多関節の指部を備えたロボットを簡単な制御で駆動する。
【解決手段】対向して設けられた複数本の指部を用いて対象物を把持するに先立って、複
数の関節を備えた指部の形状を、対象物に応じて定められた把持形状に変形しておく。そ
して、指部の形状を把持形状に保持したまま、対向して設けられた複数本の指部を用いて
、対象物を把持する動作を行う。こうすれば、対象物が変更された場合でも、新たな対象
物に応じた把持形状に指部を変形させるだけで、迅速に且つ適切に対象物を把持すること
ができる。しかも把持動作は、グリッパー型のロボットと同様に簡単な制御で実現するこ
とが可能となる。
(もっと読む)
産業用ロボット
【課題】ハンドの先端と周辺機器とが衝突したときの衝撃が大きい場合であっても、ハンドの損傷を軽減することが可能な産業用ロボットを提供する。
【解決手段】搬送対象物2を搬送する産業用ロボット1は、搬送対象物2が搭載されるハンド3と、産業用ロボット1の周辺機器にハンド3の先端が衝突したことを検知するための検知機構とを備えるとともに、ハンド3が所定方向を向いた状態で略直線状に移動するように構成されている。ハンド3は、ハンド3の先端部分を構成するとともに周辺機器にハンド3の先端が衝突したときにハンド3の基端側に向かって移動可能な衝撃吸収部材20を備えている。
(もっと読む)
把持装置、ロボットシステム及び把持方法
【課題】把持対象物を把持する際に把持対象物を高精度に位置決めすること。
【解決手段】多指ハンド3は、掌部12と関節17,18を有する複数の指部13とを備え、掌部12及び複数の指部13で工具7を把持する。掌部12は、工具7の把持対象物側接触面25に接触させる掌部側接触面12aを有している。掌部側接触面12aには、把持対象物側接触面25に設けられた突起部26,27が挿入される穴部19,20が設けられている。そして、穴部19,20に突起部26,27が挿入されることにより、掌部側接触面12aの接線方向Tに対する工具7の位置決め及び掌部側接触面12aの法線nを回転軸心とした回転方向Rに対する工具7の位置決めがなされる。
(もっと読む)
ロボットハンドのツール着脱機構
【課題】ツールの交換時間が短く、かつ視覚センサなどのツールを取り付けた場合でもロボットのハンド部全体を軽量化・コンパクト化することができるロボットハンドのツール着脱機構を提供する。
【解決手段】1対の爪部材11,12が平行に開閉するロボットハンド10でツール20を着脱するロボットハンドのツール着脱機構。ツール20がツールベース22を有し、ツールベース22は、爪部材11,12の開動作又は閉動作により爪部材の一部と係合してその位置を位置決めする3以上の位置決め装置24を備える。
(もっと読む)
平行開閉式チャックハンド
【課題】円・楕円などの内径部を有するワークを把持することができ、かつ把持爪の曲げ強度を高めることができ、これにより重量の大きいワークを把持する場合でも、内径部との間に必要なクリアランスを確保することができる平行開閉式チャックハンドを提供する。
【解決手段】開位置と閉位置の間で平行に開閉駆動される1対の支持部材12,14と、支持部材に片持ち支持された広幅把持爪16及び狭幅把持爪18とを備える。広幅把持爪16は、開位置において幅方向の両端部16a,16bが内径部の内周面6,7に接触し、中間部が内周面に沿って延びかつ外方に湾曲した凹部16cを有する円弧状の断面形状を有する。狭幅把持爪18は、閉位置において広幅把持爪16の凹部16c嵌合する断面形状を有する。
(もっと読む)
ICタグホルダー着脱装置、ICタグホルダーの装着方法ならびにICタグホルダーの取り外し方法
【課題】ICタグを装着したICタグホルダーを管体に着脱するICタグホルダー着脱装置を提供する。
【解決手段】複数の支持脚4を有し、該複数の支持脚4が開脚しようとする弾性力により管体内部に定着されるICタグホルダー3を固定可能な保持具8を先端に有するアーム7と、該保持具8によるICタグホルダー3の固定および固定の解除を操作する保持具操作手段と、前記アーム7に対して摺動可能、かつ、前記管体に挿入可能に設けられた筒状体5とを有し、該筒状体5のアーム7に対する摺動により、前記保持具8で固定したICタグホルダー3の支持脚4を前記筒状体5へ出し入れして、該支持脚4の開閉を可能としたことを特徴とするICタグホルダー3の着脱装置。
(もっと読む)
ロボット装置
【課題】把持対象物の把持状態を維持することが可能な把持形態を選択することが可能なロボット装置を提供する。
【解決手段】このロボット装置100は、ロボットアーム10と、ロボットアーム10の先端に設けられた多指ハンド部20と、視覚センサ30による検出により、把持対象物110の位置情報および形状情報を取得する画像処理部43と、把持対象物110の位置情報および形状情報に基づいて多指ハンド部20による把持形態の候補を複数抽出するとともに、抽出された複数の把持形態の候補についての多指ハンド部20の関節トルクに基づいて、抽出された複数の把持形態の候補の中から1つの把持形態を選択する制御装置40とを備える。
(もっと読む)
真空ピンセット
【課題】反りがある半導体ウエハに対して、安定して吸着することができる真空ピンセット。
【解決手段】長尺状の本体2と、この本体2の端部に設けられ、複数の吸着面4〜6を有する吸着部3と、吸着面4〜6毎に少なくとも一つ設けられ、被処理体を吸着する吸着孔7と、を備え、少なくとも一つの吸着面は、一辺に屈曲部11を有し、被処理体に対して吸着孔7が接近又は離間するように、屈曲部11を中心に回動可能に構成されていることを特徴とする真空ピンセット1を提供する。
(もっと読む)
ワーク端部検出機構及びワーク搬送機構
【課題】 照明装置を追加することなく、アライメント用カメラでワーク端部を明瞭に観察できるワーク端部検出機構及び該ワーク端部検出機構を利用したワーク搬送機構を提供する。
【解決手段】 一方の端部に開口部を有し、他方の端部に閉塞部材を有する筒状の胴部材からなるワーク端部検出機構であって、前記閉塞部材の下面側に、前記開口部から入射した光を反射するための光反射手段が設けられており、かつ、前記胴部材の開口部側の内径(φ1)よりも、前記閉塞部材側の内径(φ2)の方が大きいことを特徴とするワーク端部検出機構。前記胴部材の内部に空気吸引口を穿設し、胴部材の上部に真空吸着ヘッドを配設することによりワーク端部検出と共に真空吸着によるワーク搬送も可能になる。
(もっと読む)
真空ピンセット
【課題】反りがある半導体ウエハに対して、安定して吸着することができる真空ピンセット。
【解決手段】長尺状の本体2と、本体2の端部に設けられ、平坦部を有する先端部3と、先端部3の平坦部3aに設けられた複数の突部4と、を備え、突部4のうち少なくとも1つが、可撓性を有する材料からなる吸着部4であることを特徴とする真空ピンセット1を提供する。
(もっと読む)
保持具
【課題】 ワークの表面に対し、接触による問題がない位置にパッドを接触させることができる保持具を低コストで提供することである。
【解決手段】 ベルヌーイの原理を利用して本体に設けた保持面1aにワークWを保持する保持具を前提とし、上記本体から外方に突出させた支持部材を設け、この支持部材には、ワークWに接触して上記保持面1aとワークWとの間隔を保持するための複数のパッド12を設け、上記本体よりも外方に突出するワークWの内側にはパッド12が接触しない構成にした。
(もっと読む)
保持具
【課題】 様々な大きさのワークに適応可能な保持具を、低コストで提供することである。
【解決手段】 ベルヌーイの原理を利用して本体に設けた保持面1aにワークWを保持する保持具を前提とし、上記保持面1aの外形より突出する風よけ部材8を備え、この風よけ部材8の全部あるいは一部が、保持面1aに保持されたワークWと対向する位置関係を保つ構成にし、ワークWを保持搬送する際に、ワークWが脱落する方向x2の風圧を風よけ部材8がさえぎるようにした。
(もっと読む)
把持装置
【課題】一対の開閉レバー部の開閉方向に沿った横幅を小さくすることができ、小スペースで設置することが可能であること。
【解決手段】ロッド軸Oに沿って上下動可能とされ、下端部に連結ブロック41が取り付けられたロッド部2と、左右軸L1方向に沿って向かい合うように配設されると共に、中間部3cが前後軸L1に平行な支点軸部50に軸支された一対の開閉レバー部3と、連結ブロックと開閉レバー部の上端部3aとをそれぞれ連結すると共にロッド部の上下動に伴って開閉レバー部を左右軸方向に揺動させるリンク機構4と、を備え、開閉レバー部には、中間部から上端部に至る部分の少なくとも一部に切欠部55が形成され、一対の開閉レバー部が、切欠部内にロッド部及び連結ブロックを入り込ませた状態で左右軸方向に向かい合うように配設され、それぞれの上端部が前後軸方向に沿ってロッド部及び連結ブロックの両側に位置している把持装置を提供する。
(もっと読む)
つかみ装置
【課題】ワークをつかんだり有底筒状のワークの内部を密閉したりするチューブ体に、ワークに付着していた異物が付着するのを抑制する。
【解決手段】チューブ体11、12は軸線O方向に沿って複数配設されるとともに、それぞれのチューブ体11、12は硬質基体15との間に互いに独立した密閉空間Aを各別に形成し、給排通路13、14は互いに独立して複数配設されるとともに、それぞれの給排通路13、14は、互いに独立した各密閉空間A内に各別に連通し、複数のチューブ体11、12のうち、軸線O方向の一端に位置する一端チューブ体12には、膨張状態で、当該つかみ装置1およびワークWの軸線O方向の相対的な接近移動に伴い、ワークWの表面に摺接する摺接部材20が配設されている。
(もっと読む)
把持装置と把持装置付きロボット
【課題】ワークを安定良く把持できる把持装置を提供する。
【解決手段】ワークWを把持する把持装置1であって、水平方向の間隔が調整可能な複数のベース部材2と、リンク機構5によって各ベース部材2に対して上下に動作可能に取付けられる把持部材4と、リンク機構5の動きを規制し得るストッパ部材7とを有する。リンク機構5は、ベース部材2、把持部材4、並設される一対のリンク5a,5b、各リンク5a,5bがベース部材2に回転可能に連結される第一端部5a1,5b1、および各リンク5a,5bが把持部材4に回転可能に連結される第二端部5a2,5b2を有して形成される。ストッパ部材7は、各リンク5a,5bの各第二端部5a2,5b2が各第一端部5a1,5b1と同じ高さまたは各第一端部5a1,5b1より上の位置において、把持部材4が下へ移動することを規制し得る第一ストッパ7aを有する。
(もっと読む)
ロボットハンド
【課題】食製品の外周面を面接触によって均等に保持することのできるロボットハンドを提供する。
【解決手段】食製品5を保持自在なロボットハンドであって、ロボットハンド19におけるハンド支持部材29に互いに開閉自在に備えられた複数の開閉作動部材71を設け、各開閉作動部材71の開閉動作によって互いに中央部に集合する各開閉作動部材の集合端側に、食製品5を保持するためのフィンガ部材79を、前記ハンド支持部材29から下方向へ突出して備え、前記各フィンガ部材79が前記食製品5を保持する保持面77に、隣接したフィンガ部材79を摺動自在に接触して、前記各フィンガ部材79における前記保持面77によって囲繞して食製品5の周囲を面接触によって保持するための保持空間83を備えている。前記各開閉作動部材71が開閉動作する中央部に対応して、前記各フィンガ部材79の前記保持面77を清掃するための清掃手段を前記ハンド支持部材29に備えている。
(もっと読む)
食品の搬送装置
【課題】挟持部材を開操作したときの開度を、送出位置で食品を挟持するときの開度に対して払出位置で食品を払い出すときの開度が小さくなるように設定することができる食品の搬送装置を提供すること。
【解決手段】製造工程から複数個ずつ並んで送出位置Aに送出された食品Wを、挟持部材2によって一旦挟持して持ち上げ、次工程の払出位置Bに整列した状態で払い出す食品の搬送装置1において、挟持部材2を開閉操作する挟持部材操作手段3と、挟持部材操作手段3によって挟持部材2を開操作したときの挟持部材2の開度を、送出位置Aで食品Wを挟持するときの開度に対して払出位置Bで食品Wを払い出すときの開度が小さくなるように設定する挟持部材開度設定手段4とを備えるようにする。
(もっと読む)
保持部材
【課題】ロボットハンドにおいて食製品を保持する保持部材を提供する。
【解決手段】食製品を保持するためにロボットハンドに開閉自在に備えられる保持部材であって、ロボットハンド19におけるハンド支持部材29に開閉自在に支持される開閉作動部71と、この開閉作動部71の先端側において当該開閉作動部71の開閉作動方向に対して交差する方向へ突出して備えられたフィンガ部79と、前記食製品5を保持するために前記フィンガ部79に形成され、かつ隣接して備えられる別個のフィンガ部79と摺接すると共に食製品を囲繞する保持空間を形成するための保持面77とを備えている。
(もっと読む)
チャック装置
【課題】 装置全体の構造をシンプルにして低コスト化を図るようにする。
【解決手段】 チャック装置1は、先端側でワークWを把持可能なピンセット20と、ピンセット20の基端側に当接するアーム部30と、ピンセット20を弾性変形により開閉可能にするためにアーム部30をピンセット20に対して位置変位させる直動型ステッピングモータ40と、ワーク把持直前にピンセット20の閉速度を減速する、ピンセット20の閉状態の閉距離を調節する、又はワーク開放時のピンセット20の開速度を加速する等の機能を有したコントローラ50とを具備している。
(もっと読む)
81 - 100 / 890
[ Back to top ]