
Fターム[3C007DS01]の内容
マニピュレータ、ロボット (46,145) | 把持装置の全体構成 (1,374) | 単一の挟持装置又は吸着装置 (1,104)
Fターム[3C007DS01]の下位に属するFターム
複数の把持部を有するもの (214)
Fターム[3C007DS01]に分類される特許
21 - 40 / 890
超音波センサー、触覚センサー、および把持装置
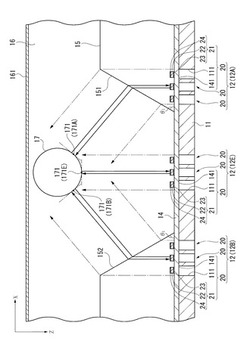
【課題】簡単な構成で、接触物の接触検出が可能な触覚センサー、および把持装置を提供する。
【解決手段】触覚センサーは、基板11と、基板11上に設けられ、接触物の接触により弾性変形可能な弾性膜16と、弾性膜16の内部に設けられ、弾性膜16が弾性変形すると、その変形に応じて位置が移動する超音波反射体17と、複数の超音波素子20をアレイ状に配列したアレイ構造を有し、基板11の表面に対して直交する方向に平面波として伝搬する超音波を発信する超音波アレイ12と、基板11上に設けられ、超音波アレイ12から発信された超音波を、超音波反射体17に向かう方向に屈折させる音響レンズ15と、各超音波アレイ12の超音波の発信および受信を制御する制御部と、を備えた。
(もっと読む)
ドア把持装置及び方法

【課題】小型化されたツールを用いる双腕ロボット単体のみで、ドアを傷つけないように把持することが可能な、ドア把持装置及び方法を提供すること。
【解決手段】双腕ロボット11は、ドア91等の重力方向の力を受ける荷重受けとしてのドアH受け部材(その構成要素であるウレタンパッド42)と、ドアを把持する第1把持治具23R1と、を備えている。第1把持治具23R1は、2点PA,PBの相対距離が可変な、ドア91の開口部120等に当接する2つのドア把持パッド53,54を有している。一方のドア把持パッド53は、ドアの荷重方向の力を受ける方向に開口部の点PAに当接し、他方のドア把持パッド54は、荷重受け(ウレタンパッド42)とドア把持パッド53とにより発生するモーメントを受ける方向に開口部の点PBに当接する。
(もっと読む)
位置決め装置およびロボットハンド
【課題】或平面上で台座を移動させる位置決め装置およびこの位置決め装置を備えたロボットハンドであって、位置決め装置が具備する第1方向への駆動部と第2方向への駆動部とが共に基台に対して位置固定可能であるものを提供する。
【解決手段】位置決め装置10の基台11に、X方向を軸方向として支承されたXネジ軸12およびスプライン軸13と、Xネジ軸12を回転駆動するX軸駆動部14と、スプライン軸13を回転駆動するY軸駆動部15とを設ける。Xネジ軸12上にYネジ軸22が支承されたX出力台座20を設け、Yネジ軸22上にY出力台座24を設ける。スプライン軸13とYネジ軸22との間に、X出力台座20と一体的に移動し且つスプライン軸13からYネジ軸22へ動力を伝達する動力伝達機構30を設ける。
(もっと読む)
把持装置
【課題】ワークの種類に応じた切り換え機構が不要である簡易な構成としながらも、大型のワークにも対応し得る把持力を確実に確保することができる把持装置を提供する。
【解決手段】ワーク10を把持するための把持装置であって、ワーク10の対応する表裏面(表面10aおよび裏面10b)に対して当接させる一対の各電磁石5・6と、各電磁石5・6を互いに押圧しあう方向に相対変位させるアクチュエータ4と、各電磁石5・6とアクチュエータ4の動作を制御する制御装置11と、を備えるとともに、制御装置11からの指令に従って、アクチュエータ4によって、各電磁石5・6を相対変位させることにより、ワーク10の重心位置Gの近傍における所定の一箇所(即ち、所定の位置X)を挟圧すると同時に、各電磁石5・6に通電することにより、ワーク10を位置Xにおいて磁着して、ワーク10を把持する。
(もっと読む)
モーター、ロボットハンドおよびロボット
【課題】コイル端部ロスを生じない巻線構造によって、コアレスでありながら高トルクのモーターを提供する。
【解決手段】円柱形状の回転体と、前記回転体の中心軸方向に延設される回転軸と、前記回転軸を回転可能に支持する基体と、前記回転体を覆う円柱缶状のステーターと、を備え、前記回転体は、円柱底面部に円周方向にN極とS極とが交互に配置される第1磁石と、円柱側面部に円周方向にN極とS極とが交互に配置される第2磁石と、を有し、前記ステーターは、前記回転体の前記円柱底面部に対向する部位と、前記回転体の前記円柱側面部に対向する部位と、中央に空隙部と、を備える複数の空芯巻線を有するモーター。
(もっと読む)
超音波センサー、触覚センサー、および把持装置
【課題】簡単な構成で、接触物の接触検出が可能な触覚センサー、および把持装置を提供する。
【解決手段】触覚センサーは、基板11と、基板11上に設けられ、接触物の接触により弾性変形可能な弾性膜15と、弾性膜15の内部に設けられ、弾性膜15が弾性変形すると、その変形に応じて位置が移動する超音波反射体16と、基板11上に設けられ、弾性膜15内に超音波を発信するとともに、超音波反射体16により反射された超音波を受信する複数の超音波素子20と、各超音波素子20の超音波の発信および受信を制御する制御部と、を備え、超音波反射体16は、超音波素子20に対向する素子対向面161を、複数の超音波素子20のそれぞれに対応して複数有する。
(もっと読む)
ロボットハンド
【課題】種々の大きさや形状の部品を十分な把持力で把持することが可能なロボットハン
ドを提供する。
【解決手段】互いの距離を変更可能に設けられた複数の指部の間で対象物を把持する動作
を行うロボットハンドにおいて、複数の指部の間に、指部の根元側と指部の先端側とを結
ぶ方向に沿って移動可能な掌部を設けておく。こうすれば、複数の指部の間に対象物を把
持するとともに、把持した対象物に掌部を当接させることができる。従って、対象物と複
数の指部との間に生ずる摩擦力と、掌部が対象物を支持する力とによって、種々の大きさ
や形状の対象物を十分な把持力で把持することが可能となる。
(もっと読む)
吸着部材、ピックアップ装置およびピックアップ方法
【課題】半導体チップへの静電気によるダメージを十分に防ぐことができ、既存の半導体チップに幅広く適用することができる吸着部材を提供する。
【解決手段】半導体チップ20に接触させるための接触面11aと、接触面11aにつながる側面11cとを有する吸着部11と、側面11cから外方向に向かって突き出る第1放電部12とを備える。
(もっと読む)
取り外し工具及び取り外し方法
【課題】耐久性に優れ、切断時の加工物の落下を防止することが可能な取り外し工具を提供する。
【解決手段】 材料の上部に接続部で接続され、表面から垂直方向に貫通孔を有する中央部、中央部から一端に向かって延伸し、垂直方向において第1空隙を挟んで互に対向する第1及び第2アーム、中央部から他端に向かって延伸し、垂直方向に直交する面内で互に対向し、第2及び第3空隙を挟んでそれぞれ材料と対向する第1及び第2レグを備える加工物を材料から取り外す取り外し工具であって、基体10の一主面に軸部12が配置され、他の主面に、軸部12の中心軸上に延伸する第1ピン2、第1ピン2の周囲に配置された第1〜第3フック3、5、7及び第2ピン9が配置される。第1ピン2を貫通孔に挿入して軸部12を回転させることにより、第1〜第3フック3、5、7をそれぞれ第1〜第3空隙に位置させると共に、第2ピン9を加工物の一側面に接触させる。
(もっと読む)
搬送ロボット用エンドエフェクタ
【課題】搬送物の状態に応じて使い分けることができるエンドエフェクタを、簡単な構造によって達成すること。
【解決手段】本発明のエンドエフェクタにおいて、アームの先端部に装着されるハンド基部と、ハンド基部に回転可能に設けられた複数の基板保持部材と、複数の基板保持部材を各回転軸線周りに回転させる回転駆動手段と、を備える。複数の基板保持部材のそれぞれは、回転軸線に沿って延在する細長部材を有し、回転軸線周りに細長部材を回転させることによって、細長部材の側面全体のうちの基板を保持する部分が変わるように構成されている。
(もっと読む)
物品搬送装置
【課題】ファンを用いて物品を搬送する物品搬送装置において、物品に関わる検出器を可及的に減らせるようにする。
【解決手段】移載装置1、非接触でガラス基板を搬送する装置である。移載装置は、ケース22と、ファン24と、吹き出し口28と、電流値測定部と、ファン制御部30と、を備えている。ケース22は、ガラス基板に対向する物品対向部42を有している。ファン24は、ファンケース54の内部に設けられている。吹き出し部は、物品対向部42に設けられ、ファン24との間で空気を流す。電流値測定部は、ファン24の負荷を検出する。ファン制御部30は、電流値測定部の検出結果によりファン24を制御する。
(もっと読む)
ロボット、ロボット用ハンド
【課題】対象物を確実に把持して運搬するロボット、ロボット用ハンドを提供することを課題としている。
【解決手段】2つの爪部を備え、各爪部における他方の爪部との対向面に凹部が形成されて、各爪部が基端を揺動軸として揺動することで凹部にて対象物を把持するロボットであって、各爪部の前記凹部は、爪部の先端部と揺動軸との間に、基端側の面と、先端側の面とを有し、爪部を揺動軸の軸方向に軸視した場合、基端側の面を含む直線と先端側の面を含む直線とが交差する点を基点とし、基点を通る線を基線とし、基端側の面の縁線における揺動方向の内側の端点を通り基線と直交する線を直行線とした場合、基線と先端側の面を含む直線とのなす角の角度αが0度より大きく90度未満であり、直行線と基端側の面を含む直線とのなす角の角度βが0度より大きく90度未満であり、基線における基点から直行線までの長さdが0より大きい。
(もっと読む)
ウエハ搬送用アームとウエハ搬送装置
【課題】本発明は、ウエハを真空吸着して所定のウエハの搬送を終えた後に、ウエハをウエハ吸着部から容易に離脱させることができるウエハ搬送用アームとウエハ搬送装置を提供することを目的とする。
【解決手段】本願の発明にかかるウエハ搬送用アームは、非弾性体で形成され、開口を有するウエハ吸着部と、該ウエハ吸着部と接続され、該開口に通じる吸気路を有する支持部と、を備えたことを特徴とする。
(もっと読む)
デパレタイズロボットのロボットハンド
【課題】平面視長方形である複数の移載物を同一平面に並べた積載位置から搬出位置へ前記移載物を移し替えるデパレタイズロボットのロボットハンドを提供する。
【解決手段】移載物3の厚みより長い抱え込み爪22,22を、移載物3の一辺より長い間隔で前後一対配し、各抱え込み爪22の下端部に抱え込みロッド23を架け渡して抱え込み枠21を構成し、互いの抱え込みロッド23を平行にし、鉛直線に対して左右対称に対向させた左右一対の抱え込み枠21,21それぞれを、各抱え込み爪22の上端部に設けた揺動軸226を本体部24に軸着して前記本体部24に支持させ、前記抱え込みロッド23,23が平行を保ったまま各抱え込み枠21を揺動させるエアシリンダ26を本体部24に設けたデパレタイズロボット1のロボットハンド2である。
(もっと読む)
触覚センサ、把持装置、及びアクチュエータシステム
【課題】構造が簡素な触覚センサ等を提供する。
【解決手段】触覚センサ70は、第1電極73aと第3電極73cとの間の第1静電容量と、第2電極73bと第3電極73cとの間の第2静電容量と、に基づいて、受圧部72に加わった押付力(X軸方向の力)又は押付力によって生じる把持力(Y軸方向の力)を検出する。これにより、3つの電極のみで、押付力、把持力等の力を検出することが可能になる。そのため、構造が簡素な触覚センサ70、この触覚センサ70を備えた把持装置及びアクチュエータシステムを提供することができる。
(もっと読む)
ロボットハンドの挟み込み軽減機構及びロボットハンド
【課題】高い安全性と大きな指先力を確保できるロボットハンドの挟み込み軽減機構を提供する。
【解決手段】本発明の一形態に係るロボットハンドの挟み込み軽減機構1は、駆動機構6から伝達される駆動力によって開閉する一対のハンド部2を備えるロボットハンドの挟み込み軽減機構であって、ハンド部2が開方向に回転駆動するときのみ、ハンド部2に所定の大きさの負荷が作用すると、駆動機構6からハンド部2への駆動力の伝達を減少させる過負荷軽減機構7を備える。
(もっと読む)
つかみ装置
【課題】ワークが不意に離脱するのを規制しつつ、長寿命化および作業の迅速化を図ること。
【解決手段】第1チューブ体2および第2チューブ体3と、各チューブ体2、3の両端がそれぞれ全周にわたって固定され、該チューブ体2、3との間に流体が給排される空間Aが形成された固定部材5と、該固定部材5に連結された弾性変位可能な可動部材6と、を備え、第1チューブ体2は、膨張変形したときに可動部材6を押圧して弾性変位させ、第2チューブ体3は、当該つかみ装置1とワークWとを軸線O方向に沿って相対的に接近移動させることでワークWに内挿または外挿され、可動部材6には、第2チューブ体3がワークWに内挿または外挿されるときに、弾性変位した可動部材6が復元変位することでワークWの被係合部W1に係合し、ワークWに対する第2チューブ体3の内挿または外挿が解除されるのを規制する係合部16が設けられているつかみ装置1を提供する。
(もっと読む)
ワークの特定部位認識方法及びその装置
【課題】 ワークの特定部位の位置を速やかに認識することができるワークの特定部位認識装置を提供する。
【解決手段】 ワーク1の特定部位であるボルト孔7,8を認識するワークの特定部位認識装置であって、ワーク1を撮像するカメラ2と、このカメラ2が撮像するワーク1を把持する関節型ロボット3と、この関節型ロボット3によるワーク把持位置を関節型ロボット3の座標系に基づいて算出し、ワーク把持位置と特定部位であるボルト孔7,8との相対的位置関係に基づいてカメラ2の認識領域を、特定部位であるボルト孔7,8を含む周辺領域に限定する認識領域限定手段9を備える。
(もっと読む)
指ユニット及び把持装置
【課題】形状が複雑なものや破損したり傷付きやすい把持対象物であっても、適切に掴むことが可能な指ユニット及び把持装置を提供する。
【解決手段】把持装置を構成する指ユニットは、ベース部材22の表面に指腹機構部24を設けた構成とされている。指腹機構部24は、把持対象物に対して面接触可能な表層部26と、表層部26に追従して変形可能な中間部材28と、表層部に対して裏面側から押圧可能な支持部材30とを有し、ベース部材22と表層部26との間に中間部材28及び支持部材30が配された構造とされている。指腹機構部24は、把持対象物との接触に伴って表層部26に対して圧力が作用すると、支持部材30を支点として表層部26の姿勢が把持対象物の表面に沿うように変化し、把持対象物側に作用する圧力の局所的上昇が防止される。
(もっと読む)
真空吸着装置
【課題】真空吸着装置においてワークの設置状況にかかわらず、簡素な構成で前記ワークを確実且つ安定的に吸着することができる。
【解決手段】真空吸着装置10は、負圧流体の供給される供給ポート22を有したボディ12と、該ボディ12の下部に設けられワークWを吸着可能なパッド14と、前記ボディ12とパッド14との間に設けられるシール部材16とを備え、前記パッド14が多孔質体から形成されると共に、前記シール部材16が、前記パッド14に対して剛性が低く形成される。また、パッド14には、該パッド14を平面状に維持する保持プレート26が装着される。そして、例えば、パッド14に対して傾斜したワークWを吸着する際、該パッド14がシール部材16を変形させながら傾斜して前記ワークWに密着する。
(もっと読む)
21 - 40 / 890
[ Back to top ]