
Fターム[3C269BB07]の内容
数値制御 (19,287) | 目的、目的を達成するための改良点 (2,252) | オペレータの操作性の向上 (584)
Fターム[3C269BB07]の下位に属するFターム
プログラム作成、変更時の操作 (357)
異常発生時の操作 (30)
Fターム[3C269BB07]に分類される特許
181 - 197 / 197
数値制御装置

【課題】数値制御工作機械によりワークを加工するのに先だってオペレータが行わなければならない段取り作業の作業量を軽減させることができる数値制御装置を得ること。
【解決手段】複数種の工具を使い分けてワークを加工する数値制御工作機械の動作を制御する数値制御装置120を構成するにあたって、工具毎の識別データ1と、工具毎の工具長オフセット量3と、工具毎に設定されて該工具が新規に登録されたものであるか否を表す工具更新情報5と、工具長オフセット量が新規に入力されたものであるか否かを表すオフセット量更新情報7と記憶部50に格納し、さらに、工具長オフセット量の測定が済んでいない工具または工具長補正量の検証が済んでいない工具を識別データと工具更新情報またはオフセット量更新情報とに基づいて選び出し、当該工具を数値制御工作機械の所定箇所に装着させてレファレンス点にまで移動させる測定・検証制御部75を設ける。
(もっと読む)
工作機械の運転操作システム

【課題】工作機械の状態を確認しながら運転操作をすることができる工作機械の運転操作システムを提供する。
【解決手段】操作用コンピュータ40は、数値制御装置20から制御用コンピュータ30に入力される数値制御装置20の作動状態データを受信して表示装置44に表示させとともに、制御データ及び作動指令を入力装置45により入力して制御用コンピュータ30に送信して、制御用コンピュータ30から数値制御装置20に出力することで数値制御装置20を作動させて工作機械10の運転操作を行う。
(もっと読む)
工作機械、具体的には、レーザ工作機械の分散化制御のための方法
本発明は、工作機械(24)、詳細には、レーザ工作機械の分散化制御のための方法であって、この工作機械が、保護用ハウジング(22)によって囲まれ、機械加工領域(31)にアクセスするための少なくとも1つの監視される領域(27、28)を有する機械加工領域(31)を備え、工作機械(24)を始動するために少なくとも1つの制御盤(21)によって操作される制御部を備え、1つ又は複数の多機能キー(16)を用いて制御され、少なくとも1つの多機能キー(16)が、少なくとも1つのアクセス領域(27、28)と関連付けられ、それぞれの多機能キー(16)が押されると、工作機械(24)に対する運転シーケンスの連続作業ステップの繰返しシーケンスで次にある運転シーケンスの作業ステップが作動する方法に関する。  (もっと読む)
(もっと読む)
コンピュータ数値制御工作機械に適用する操作訓練シミュレーション装置
【課題】工作機械の切削加工作業が訓練できるコンピュータ数値制御工作機械に適用する操作訓練シミュレーション装置を提供する。
【解決手段】実体制御装置150、ソフトウェアシミュレータ160、伝送装置及びシミュレーション表示装置170を備える。実体制御装置150は、工作機械の動作コマンドを入力するための指令操作パネルを含む制御パネル110を有する。ソフトウェアシミュレータ160は、実体制御装置150に接続され、指令操作パネルで入力された動作コマンドを基に動作シミュレーションを生成する。伝送装置は、実体制御装置150及びソフトウェアシミュレータ160に接続される。シミュレーション表示装置170は、ソフトウェアシミュレータ160に接続され、ソフトウェアシミュレータ160により生成された動作シミュレーションを表示する。
(もっと読む)
工具パラメータをコンピュータ支援生成するための方法、データ処理システム、およびコンピュータプログラム、ならびにデータキャリア
【課題】成形プロセスによりシートメタル成形部品を製造するための工具に関する、コンピュータ支援方法。
【解決手段】部品10の形状モデルにおいて、部品10の形状特性11−15の組を決定するステップを含み、形状特性の各々は特性の種類と形状パラメータにより記述される。方法基準は各々の形状特性を製造するための形態を記述する。形状特性に関連する方法基準の選択は当該特性の種類に依存する。方法基準は少なくとも1つの処理ユニットを表わすモジュールを含み、どの処理ユニットが実行されるかを記述する。方法はモジュールの各々について構成要素を決定するステップを含む。構成要素はモジュールを実現するのに必要な工具について記述し、形状特性の形状パラメータから構成要素パラメータを決定するステップを含む。構成要素パラメータは当該構成要素の、または各々の工具の形状パラメータを含む。
(もっと読む)
設定状態表示機能付き工作機械
【課題】 制御や操作のための設定項目につき、設定状態の変更があった場合に、その変更状態の認知を作業者に促すことのできる設定状態表示機能付き工作機械を提供する。
【解決手段】 工作機械本体1と、この工作機械本体1を管理する管理手段2とを備える。管理手段2は、可変設定可能な設定手段11に設定された各種の設定項目の設定状態に従って工作機械本体1の制御および操作を行う制御・操作手段3、および作業者により操作されて前記設定手段11の設定状態を変更する変更操作手段14を有するものである。この管理手段2に、変更操作手段14による変更があれば、設定手段11の変更された設定状態を画面表示手段7の画面7aに表示させる表示出力手段6を設ける。表示出力手段6は、所定の基準設定状態を定めた基準設定状態記憶部16と、設定手段11の設定状態を基準設定状態記憶部16と比較して基準設定状態から逸脱する設定項目につき、変更された設定状態を表示させる比較部17とを有する。
(もっと読む)
機械モデルを組み込まれた制御装置
生産機械(1)が、制御装置(16)によって、制御装置(16)に格納されている制御プログラム(18)に応じて制御可能である。生産機械(1)が少なくとも2つの要素を有し、2つの要素がインターフェースに互いに接続されている。制御装置(16)内に、変更要素の要素記述が格納され、要素記述は、どの要素(26)が互いに接続可能であるかを制御装置によって求め得るように、それぞれ、存在するインターフェースの少なくとも1つのリストを有する。制御装置(16)内には、生産機械(1)がどの要素を有しかつ要素がどのインターフェースを介して互いに接続されているかを少なくとも含む目標構成記述が格納されている。制御装置(16)はオペレータインターフェース(22)を有し、オペレータインターフェース(22)を介して目標構成記述が生産機械(1)のオペレータ(23)によって要求可能であり、要求に応じてオペレータ(23)に出力可能であり、かつオペレータ(23)によって変更可能である。  (もっと読む)
(もっと読む)
数値制御装置への指令方式
【課題】加工プログラムと加工に関する情報を一元化し、加工中に加工に関する情報の収集も可能にする。
【解決手段】ISO14649形式のNCプログラムの「Display_Message」の命令に、引数「NC:」の拡張命令を設ける。NCプログラムから順次1行ずつ解読し(a2)、メモリに記憶するとき、「Display_Message」命令で、引数が「NC:」のときは、拡張命令フラグをオンとして、解読結果と共にメモリに記憶する(a3〜a6)。この解読した命令を実行するときには、拡張命令フラグがオンか判断し、オンでなければ通常の処理を行う。オンのときには、拡張命令の処理を実行し、引数で指令された種類の情報を引数で指示された処理を行う。この拡張命令で加工状態の情報や外部データベースからの情報等の加工に関連する情報を収集し表示することができ、情報が一元化される。
(もっと読む)
NC加工設備及びこれを用いたワークの加工方法
【課題】素材や工具の状態が変化したときにも使用される工具に適した主軸回転数や送り速度などの加工条件を現場において容易に設定でき、生産効率の低下を防止することができるNC加工設備及びこれを用いたワークの加工方法を提供する。
【解決手段】複数の工具を備えたNC加工設備に、複数のオーバーライド値設定手段1,2,3、4と、使用する工具もしくはNCプログラム中のコードによって利用するオーバーライド値設定手段を自動的に選択する制御手段とを設ける。使用する工具によって利用するオーバーライド値設定手段を変更しつつ加工を行う。工具によってオーバーライド値を自動的に変えることができ、生産効率の向上と現場作業員の負担軽減を図ることができる。
(もっと読む)
工作機械の摩耗状態を算定するためのシステム
本発明は、工作機械の摩耗状態を算定するためのシステムに関する。このシステムは、 制御装置を含む工作機械と、生産制御コンピュータと、工具データベースと、工作機械の制御装置、生産制御コンピュータおよび工具データベースにその都度データ接続を介して接続されるシミュレーションコンピュータとを有する。シミュレーションコンピュータが、実際の機械データ、製造データおよび工具データの考慮のもとにシミュレーション過程によって工作機械の消耗状態を表すデータを求め、データ接続を介して表示ユニットまたは他のプロセスに供給するように設けられている。  (もっと読む)
(もっと読む)
加工材の幾何学的形状を検知するためのシステム及び方法
本発明は、加工材(1)の幾何学的形状を加工材の加工のため検知するためのシステム及び方法の関する。加工材(1)の加工のための製造計画の最適化を容易にするため、システムが、加工ステップ前の加工材(1)の少なくとも1つの画像を発生させる少なくとも1つのカメラ(2)、加工ステップ後の加工材(1)が有すべき目標幾何学的形状値のためのメモリ領域、加工ステップ前の加工材(1)が有する加工材幾何学的形状値を少なくとも1つの画像に基づいて決定するための決定手段、及び加工材幾何学的形状値と目標幾何学的形状値との間の差を記述する幾何学的形状差値(3)を計算するための計算手段を有する。  (もっと読む)
(もっと読む)
位置案内されながら通過されるべきラフ軌道の算定方法
初期関数(AF)によって記述された、位置案内されながら通過されるべき初期軌道(2)がコンピュータ(15)に設定され、それにより、スカラー軌道パラメータ(s)を初期関数(AF)へ代入することで初期軌道(2)上の対応する位置(pA)がそれぞれ規定される。スカラー軌道パラメータ(s)は時間(t)とは異なり、初期軌道(2)に沿って進む経路(s)について特徴的である。コンピュータ(15)はスカラー軌道パラメータ(s)の関数としての初期軌道(2)に、スカラー軌道パラメータ(s)を対象とするローパスフィルタ特性を有するフィルタリングを施し、そのようにしてラフ関数(GF)を求め、それにより、ラフ関数(GF)へのスカラー軌道パラメータ(s)の代入によってラフ軌道(13)上での対応する位置(pG)がそれぞれ規定される。コンピュータ(15)は、初期軌道(2)からラフ軌道(13)までの間隔がスカラー軌道パラメータ(s)の値に関わりなく事前設定された制限(S)を常に下回るようにラフ関数(GF)を求める。  (もっと読む)
(もっと読む)
工作機械の較正方法
ワークピースを保持する第1の回転可能な部分、すなわちチャック(4、32、202)を有する回転機械(30)を較正する方法が記載されている。第1の回転可能な部分(4、32、202)は、それに関連する第1の形体(6、34、206)を有する。方法は、測定プローブ(10、38、204、236)を使用し、第1の形体(6、34、206)の位置を決定するステップ、第1の回転可能な部分(4、32、202)をある角度まで回転させるステップ、及び前記測定プローブ(10、38、204、236)を使用し、第1の形体(6、34、206)の新しい位置を決定するステップを備えている。回転ヘッド形ミルターン旋盤(30)への技術の広がりが、また記載されている。  (もっと読む)
(もっと読む)
強化された手動制御によるCMMアーム
本発明は、外郭が設けられた強固CMMアーム用装置に関し、内部CMMアームと、内部CMMアームを、1つ以上の内部ボリュームが、固体対象物および流体の進入に対してシールされるように、複数の伝達手段を介して駆動する外郭を備える。本発明はまた、RCAの触覚制御にも関する。 (もっと読む)
機械の作業進行を可視化するための表示ユニットを有する工作機械または生産機械
本発明は工作機械または生産機械に関し、その機械は機械の作業進行およびパラメータ又はそのいずれか一方を可視化するための表示ユニット(4、5)を有し、表示ユニット(4、5)として投影ディスプレイ(4)が設けられている。この表示ユニットは、工作機械または生産機械のオペレータに従来の表示ユニットまたは操作盤にくらべて改善された可視化およびインプットを可能にする。 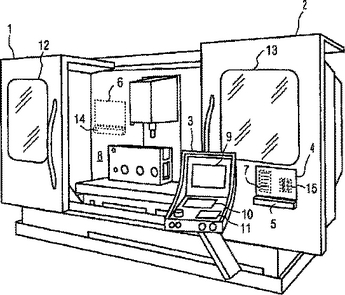 (もっと読む)
(もっと読む)
複数の相互作用ロボットをオフラインでプログラミングする方法及びシステム
複数の相互作用ロボットをオフラインでプログラミングする方法及び装置を開示する。例えば、複数の相互作用ロボットをオフラインでプログラミングするシステム(100)は、複数の相互作用ロボット(131〜133)のプログラムコード(111)をオフラインでプログラミングし、そして検証するコンピュータ(110)と、コンピュータ(110)に接続されてプログラムコード群の内の少なくとも一つのコードのダウンロードを受信して実行するロボットコントローラ(120)と、を含む。複数の相互作用ロボット(131〜133)はロボットコントローラ(120)によって制御することができる。  (もっと読む)
(もっと読む)
制御装置によって制御される工作機械のための駆動方法
工作機械(1)を制御する制御装置(5)がステップシーケンス(S1〜S11)を処理する。その際制御装置は加工材(3)に属する加工材データ媒体(15)から部分プログラム(18)を無線式に読み出し、読み出された部分プログラム(18)に相応して加工材(3)を加工する。  (もっと読む)
(もっと読む)
181 - 197 / 197
[ Back to top ]