
Fターム[2B076ED30]の内容
収穫機本体(機枠、駆動) (12,770) | 制御対象 (1,228) | その他の制御対象 (166)
Fターム[2B076ED30]に分類される特許
81 - 100 / 166
コンバインの排藁結束装置
【課題】脱穀部から排藁搬送装置を介して搬送される排藁の株元を揃える根揃え板を備えたコンバインにおいて、脱穀部に投入される前に既に折れ曲がった状態にある倒伏材の株元と根揃え板との当接により、稈姿勢の乱れを伴った結束ミスや詰まりが誘発されることを防止する。
【解決手段】根揃え板移動装置73による根揃え板71の排藁の稈身方向への移動制御を、株元検知手段97による検出結果に基づいて根揃え板71を適正な根揃え位置に合わせる通常制御モードと、前記株元検知手段97よる検出結果に拘らず、当該根揃え板71を排藁の株元から離間する方向に強制的に移動させる倒伏材制御モードとに切換え可能に構成するにあたり、前記通常制御モードと倒伏材制御モードの切換えを、前処理部4の動作速度を増速する既存の操作手段35の増速操作に連動させて行えるように構成した。
(もっと読む)
作業機械用の制御装置

【課題】書き込み可能な不揮発性の記憶手段の個数の削減によって構成の簡素化を図りコスト低減を図ることが可能となる作業機械用の制御装置を提供する。
【解決手段】通信手段TUを介して互いに通信可能な複数の制御部が機械各部に分散配備され、複数の制御部のうちのいずれかの制御部が書き込み可能な不揮発性の記憶手段を備える情報管理用の制御部H1として構成され、情報管理用の制御部H1が、電源投入により起動した後に、通信手段TUを介して記憶手段50に記憶している制御管理用情報を記憶対象制御部H2〜H6に送信する制御管理用情報分配処理を実行するように構成され、記憶対象制御部H2〜H6の夫々が、電源投入により起動した後に、情報管理用の制御部H1から通信手段TUを介して送信される自己についての制御管理用情報を受信する制御管理用情報取得処理を実行する。
(もっと読む)
コンバイン
【課題】前処理部の瞬間的な動力不足を防ぐことにより、エンジンの排気量を小さくしてコストダウンを図ると共に、燃料消費量を抑える。
【解決手段】エンジンEの動力を走行変速装置(走行用無段変速装置11及びミッションケース12)を介して走行部7に伝動する走行動力伝動経路14と、走行動力伝動経路14から取り出した車速連動の動力を前処理部2に伝動する前処理動力伝動経路15とを備えるコンバイン1であって、前処理動力伝動経路15中に、前処理部2の駆動をアシストする電動アシストモータ17を設ける。
(もっと読む)
作業車の走行制御装置
【課題】 煩わしさの少ない簡単な作業で作業対象領域における自動操向制御用の設定経路を設定することが可能となる作業車の走行制御装置を提供する。
【解決手段】 GPS位置情報算出手段100にて求められる車体の位置情報に基づいて車体が作業対象領域内の設定経路に沿って走行するように操向手段を自動的に操作する自動操向制御を実行する制御状態と自動操向制御を実行しない非制御状態とに切り換え自在な自動操向制御手段JSが、非制御状態において経路設定モードに切り換えられると、車体が操向操作具にて操向手段が操作され且つ作業対象領域の周縁部に沿って移動するときのGPS位置情報算出手段100にて求められる複数の車体の位置情報を記憶し且つ記憶された複数の車体の位置情報に基づいて作業対象領域を特定してその特定した作業対象領域に基づいて設定経路を自動設定する経路設定処理を実行する。
(もっと読む)
作業車用のレバー操作装置
【課題】 車体に大幅な構造改良を加えることなく簡素な構成で自動操縦を行えるようにすることが可能なものでありながら、手動にて操縦操作する場合にも容易に対応することが可能な作業車用のレバー操作装置を提供する。
【解決手段】 作業車の運転部に被操作方向に移動操作自在に備えられた手動操作レバー18を前記被操作方向に沿って移動操作可能に保持するレバー保持部33と、そのレバー保持部33を前記被操作方向に沿って移動させる移動操作部ISとが備えられ、且つ、前記レバー保持部33が、前記手動操作レバー18を前記被操作方向に沿って移動操作可能に保持する保持状態と前記手動操作レバー18の前記被操作方向に沿う手動操作による移動を許容する解除状態とに切り換え自在に構成されている。
(もっと読む)
コンバインのピッチング制御装置
【課題】圃場コーナー等における切り返し操作による後進直後においても、刈取部の簡易な高さ調節操作によって迅速な刈取作業の再開を可能とするコンバインのピッチング制御装置を提供する。
【解決手段】コンバインのピッチング制御装置は、 刈取部(9)を前端に備えた車体とこの車体を走行支持するために前後進および旋回走行が可能な左右のクローラ(7)による走行部との間に介設され、上記車体の前後方向の傾斜を変更調節する姿勢調節部(27)について、その前後傾斜を水平制御によって水平位置まで修正する制御部によって構成され、この制御部は、機体の旋回動作に付帯する変化に基づき、その開始から復帰までの間について傾斜角度を維持する傾斜固定制御を行うように制御処理を構成したものである。
(もっと読む)
作業車用のレバー操作装置
【課題】 車体に大幅な構造改良を加えることなく簡素な構成で作業車の無人操縦を行えるようにすることが可能な作業車用のレバー操作装置を提供する。
【解決手段】 作業車の運転部に被操作方向に移動操作自在に備えられた手動操作レバー18をその被操作方向に沿って移動操作可能に保持するレバー保持部33と、そのレバー保持部33を前記被操作方向に沿って移動させる移動操作部ISと、前記レバー保持部33の移動操作位置を検出する操作位置検出手段Kと、前記運転部4に着脱自在に取り付けるための取付部28Aとがユニット状に組み付けられている。
(もっと読む)
コンバインの姿勢制御装置
【課題】機体の左右姿勢を制御する姿勢制御装置を備えたコンバインにおいて、姿勢制御装置の目標傾斜角を設定する設定器であるダイヤルを他部品の兼用化により廃止してコストの低減を図る。
【解決手段】機体の左右姿勢が設定傾斜となるようにクローラ走行装置16L,16Rを昇降制御する自動傾斜制御と、該自動傾斜制御に優先して手動操作具65によりクローラ走行装置16L,16Rを昇降制御する手動傾斜制御とを可能にする制御手段41,61とを備え、前記自動傾斜制御での作業走行中に手動操作具65の操作を行った時は、その操作を終了した時点における機体の左右姿勢を設定傾斜とする傾斜設定モードとして自動傾斜制御に復帰せしめると共に、前記傾斜設定モードでの作業走行中に自動傾斜制御の起動手段62を操作すると、傾斜設定モードから機体の水平姿勢を設定傾斜とする水平設定モードへ自動的に切換えて自動傾斜制御を継続するように構成した。
(もっと読む)
コンバイン
【課題】刈取部の各駆動部を個別に駆動することができるコンバインを提供する。
【解決手段】
刈取部の各駆動部は、それぞれ駆動軸に電動モータをそれぞれ配設しているので、各駆動部を電動モータにより個別に駆動することができ、部品数を少なくして駆動系を簡単化することができる。また、電動モータから直に各駆動部に動力を伝達しているので、動力の伝達効率が向上する。さらに、各駆動部を個別に駆動することができるので、各駆動部に個別にメンテナンスしたい場合などの作業性が向上する。
(もっと読む)
脱穀機
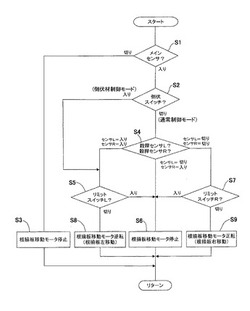
【課題】刈取部にて刈取った穀桿を脱穀部に搬送している状態にあるのか(刈取モード)、手刈りした穀桿を搬送している状態にあるのか(手扱モードという)、又は穀桿の脱穀部への搬送を行っていない状態にあるのか(待機モード)を判断し、各モードに応じて、穀桿から分離した穀粒及び塵埃を選別する選別部での選別精度を機械的及び自動的に調整し、ロス量を低減させる。
【解決手段】排桿量に応じて機械的に回動する回動レバー52に、サーボモータ70を連結する。刈取スイッチ、脱穀スイッチ、穀桿センサ及び速度センサから出力された信号をコントローラに入力して、入力された信号に基づいて、刈取モード、手扱モード又は待機モードを判断する。コントローラは、各モードに応じてサーボモータ70を作動させて、機械的及び自動的に回動レバー52を回動させる構成とした。
(もっと読む)
産業機械の防振装置
【課題】防振部の動力を低減するとともに、防振性能を向上させる、燃費および作業性を向上させた産業機械の防振装置を提供する。
【解決手段】動力軽減手段47は、圧送部37と、シリンダライナ33との間の流路36に、流路切換弁42,42a,42b,42d,42eと、アキュムレータ46とを備えるとともに、機体には、機体の振動を検出する振動検出器35を備え、流路切換弁42,42a,42b,42d,42eと、振動検出器35とを、制御部39に接続する。また、機体には振動検出器35を備え、流路切換弁42と、振動検出器35とを、制御部39に接続する。
(もっと読む)
作業機
【課題】 後進時に機体を上昇させて機体の地面への接触を回避するとともに、後進後に再び前進する場合にはオペレータの手間を要することなく元の作業を素早く再開できる作業機を提供する。
【解決手段】コンバイン(作業機)は、機体の左右両側に配置されるクローラ走行部と、クローラ走行部の接地面に対して機体を昇降させるために左右に配置される機体昇降シリンダと、刈取部の昇降操作及び前記機体の前後進操作が可能な操作部と、を備える。また、コンバインは、操作部の操作に応じて刈取部昇降シリンダ、クローラ走行部及び機体昇降シリンダを制御する制御部を備える。制御部は、刈取部の上昇操作及び機体の後進操作の両方が検出されたときに、機体を上昇させる制御及び機体の後進制御を行う。その後に前進操作が行われ、機体が所定距離以上前進すると(S302)、制御部は、機体を上昇させる前の高さに機体を戻す制御を行う(S303〜S305)。
(もっと読む)
芝管理用車両全輪駆動システム
【課題】芝管理用車両の全輪駆動牽引制御システムで、タイヤのスリップを防止するシステム。
【解決手段】芝管理用車両10の全輪駆動牽引制御システム110が、車両を推進させる主輪を含む。第1モータが、主輪34,34’を回転させる。牽引制御システムは、第1モータ80電流要求または主輪もしくは第1モータの回転速度のいずれかを監視する第1モータと通信する第1部分を有し、牽引制御値を生成する。第2モータ90によって回転させられる副輪28は、車両を、車両非スリップ状態で操舵する。牽引制御システムの第2部分が、副輪の操舵角αの値を決定する。牽引制御値と比較され、牽引制御システムに記憶される速度限界値が、主輪牽引力損失事象を示すスリップ発生メッセージを生成する。操舵角の値とスリップ発生メッセージとを比較することによって生成された第2モータ駆動信号が、牽引力損失事象中、第2モータに電力供給する。
(もっと読む)
作業機
【課題】 作業場所の状況に応じて効率的に機体の昇降制御を行う作業機を提供する。
【解決手段】コンバイン(作業機)は、刈取部(作業部)と、この刈取部を昇降させるための刈取部昇降シリンダと、機体の左右両側に配置されるクローラ走行部と、クローラ走行部の接地面に対して機体を昇降させるために当該機体の左右に配置される機体昇降シリンダと、刈取部の昇降操作及び前記機体の前後進操作が可能な操作部と、を備える。また、コンバインは、操作部の操作に応じて刈取部昇降シリンダ、クローラ走行部及び機体昇降シリンダを制御する制御部を備える。制御部の制御モードは、切換スイッチにより、第1制御モードと第2制御モードとの間で切換可能である。制御部は、刈取部の上昇操作及び機体の後進操作の両方が検出された場合は、第1制御モードでは機体上昇制御及び機体の後進制御を行い、第2制御モードでは機体を上昇させずに後進制御を行う。
(もっと読む)
作業車の姿勢制御装置
【課題】機体本体の傾斜角の変更操作を適切に行うことができる作業車の姿勢制御装置を提供する。
【解決手段】機体本体の左右傾斜角及び前後傾斜角を変更操作自在な姿勢変更操作手段が、機体本体における左側前部、左側後部、右側前部、及び、右側後部の夫々において走行装置の接地部に対する高さを各別に変更調節自在な4個の駆動手段を備え、姿勢制御手段が、4個の駆動手段のうちの2個の駆動手段を駆動停止させた状態で、且つ、その駆動停止させた2個の駆動手段夫々の走行装置の接地部に対する各高さ位置を含む基準平面KHを設定して、他の2個の駆動手段を基準平面KHからの各操作量が同じになるように駆動操作することにより、4個の駆動手段の走行装置の接地部に対する各高さ位置にて平面を形成する状態を維持させる平面維持姿勢変更作動を実行するように構成されている。
(もっと読む)
移動農機
【課題】デモンストレーション動作を自動で行うことによって、集客及び点検の容易な移動農機を提供する。
【解決手段】コンバインのマイコン50は、データ読出し手段51及び動作データを格納したデータ格納手段52を有し、こぎ深さ自動スイッチ46を押しながらエンジンを始動させることによって、通常モードから設定モードへと切換わる。データ格納手段52は機体各部ごとに個別に形成されており、説明者は作動箇所を適宜選択して、データ読出し手段51にデータ格納手段52から動作データを読出させる。マイコン50に読出された動作データが各種スイッチ及びセンサから入力されたとみせかけて、こぎ深さ駆動モータ56、搬送駆動モータ58、前処理昇降ソレノイド12a、オーガ旋回モータ36などのアクチュエータを制御し、機体を動作データ通りに作動させる。
(もっと読む)
コンバインの油圧駆動回路
【課題】コンバインの油圧駆動回路等において、一部の油圧回路構成を共通化して製造コストを低減し、安価に提供できるものとする。
【解決手段】三つのリリーフ弁1,2,3と一つの分流弁4及び一つのチェック弁5を設けた油圧ブロックをベースブロックAとし、ベースブロックAに対して左ローリングシリンダ6を制御する電磁バルブ15を組み込んだ左ローリング油圧ブロックBと右ローリングシリンダ7を制御する電磁バルブ8を組み込んだ右ローリング油圧ブロックCを一体的に連結した機体制御油圧ブロックDと、ベースブロックAに対して刈取スライドシリンダ9を制御する電磁バルブ10組み込んだ刈取スライド油圧ブロックEと刈取上下シリンダ11を制御する電磁バルブ12を組み込んだ刈取上下油圧ブロックFを一体的に連結した刈取操向制御ブロックHを設ける。
(もっと読む)
コンバインの脱穀装置
【課題】選別性能の向上、および三番飛散粒の減少を図ると共に、全高を低くして機体をコンパクトにする。
【解決手段】主選別風路(6)に沿って選別風を送る主選別ファン(7)と、副選別風路(8)に沿って揺動選別装置(10)の揺動選別網(10a)の下側から上側へ選別風を送る副選別ファン(9)とを設ける。そして、主選別風路(6)の上側における主選別ファン(7)のファンケイシング(7a)の後側上方の位置に副選別ファン(9)を配置し、主選別風路(6)の上側の壁体によって副選別ファン(9)の下側のケイシングを形成する。
(もっと読む)
刈取収穫機
【課題】 走行機体の水平基準面に対する前後傾斜角を設定傾斜角に維持しながら刈取作業を行うことが可能なものでありながら、刈取部が地面に突っ込むおそれを少なくすることが可能な刈取収穫機を提供する。
【解決手段】 刈取部10の対地高さが制御目標高さになるように刈取シリンダC1の作動を制御する刈取昇降制御並びに走行機体Vの水平基準面に対する前後傾斜角が設定傾斜角に維持されるように姿勢変更操作手段の作動を制御する姿勢制御を実行する制御手段が、刈取部10が地面に近付く形態で走行機体Vの前後傾斜角を前下がり傾斜方向に姿勢変更させているときは、目標対地高さ設定手段にて設定される目標対地高さに対応させて定めた基準対地高さよりも前傾斜操作用設定量だけ高い値を制御目標高さとして定め、走行機体Vの前後傾斜角を前下がり傾斜方向に姿勢変更させていないときは基準対地高さを制御目標高さとして定める。
(もっと読む)
コンバイン
【課題】第1及び第2スイッチの誤操作を防止しながら、第1及び第2スイッチの操作性を向上させることができ、操向レバーの操作性を向上させることができるコンバインを実現する。
【解決手段】コンバインにおいて、運転部Xの前部に機体操向用の操向レバー70を備えて、互いに相反する操作をする第1及び第2スイッチ74,75を、操向レバー70における操作部72の異なる面に配設する。
(もっと読む)
81 - 100 / 166
[ Back to top ]