
Fターム[2B076ED30]の内容
収穫機本体(機枠、駆動) (12,770) | 制御対象 (1,228) | その他の制御対象 (166)
Fターム[2B076ED30]に分類される特許
41 - 60 / 166
農作業車両運行管理システム
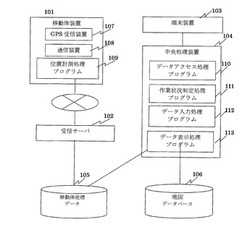
【課題】 農作業車両の運行状況を即時的に、空間的に確認することができる農作業車両運行管理システムを提供することにある。
【解決手段】 農作業車両に搭載された移動体装置から送信された位置情報を受信し、地図データベースから取得した地図データの表示画面に重ねて表示する手段を備えることを特徴とする。また、移動体装置から送信された位置情報と、地図データベースから取得した圃場データとの重なりの条件によって、表示画面に作業状況を色分け表示する手段をさらに備えることを特徴とする。また、移動体装置から送信された位置情報の日付と、地図データベースから取得した圃場データと圃場データに格納された作業予定日の比較結果に基づき、表示画面に圃場データを色分け表示する手段を備えることを特徴とする。
(もっと読む)
コンバイン

【課題】
コンバインにおいて、刈取無段変速装置の変速検出用の刈取トラニオン軸検出センサの異常を判定し、異常時には刈取無段変速装置の駆動を減速し停止し、刈取作業の安全を確保すると共に、刈取穀稈の滞留や詰まりを防止する。
【解決手段】
刈取無段変速装置(19)のトラニオン軸の変速状態を検出する刈取トラニオン軸検出センサ(SE1)と、刈取無段変速装置(19)を変速制御するコントローラ(35)と、コントローラ(35)における刈取無段変速装置(19)の刈取自動変速の入切を指定する刈取自動変速入切スイッチSW1とを備えたコンバインにおいて、刈取変速手段を変速操作したときに刈取トラニオン軸検出センサ(SE1)が変速検出をしない場合には、刈取トラニオン軸検出センサ(SE1)を異常と判定し、異常判定時には刈取無段変速装置(19)を減速し所定時間後に停止させる機能を前記コントローラ(35)に持たせる。
(もっと読む)
コンバインの刈取フローティング装置
【課題】刈取搬送装置を、安定した弾性力で位置保持し、地表面基準で異常振動の発生も少なく、安定した作業走行が行なえるものとする。
【解決手段】走行フレーム(1)の前部に、刈取搬送装置(2)を、支持した刈取バランススプリング装置(3)のスプリング張力を、土壌の接地センサ(4)、又は走行負荷センサ(5)の検出情報に基づいて、いずれか一方の取付位置を、他方に対して遠近方向に自動的に調節してバランススプリング(8)の全長を変更することにより調整する構成とした。また、刈取バランススプリング装置(3)は、そのスプリング張力を、接地センサ(4)、又は走行負荷センサ(5)の検出情報に基づいて、走行フレーム(1)側の取付位置か、又は刈取搬送装置(2)側の取付位置のいずれか一方を、他方の取付位置に対して上下方向に取付位置を自動的に調節して前記バランススプリング(8)の全長を変更して調整する構成とした。
(もっと読む)
ハイブリッド作業車
【課題】ハイブリッド作業車がコントローラの異常で暴走するのを防いで作業の安全性を高める。
【解決手段】エンジン(1)の駆動力または電動モータ(2)の駆動力のうちのいずれか一方または両方で動力伝動装置(3)を駆動する構成とし、バッテリ(4)から電力コントローラ(6)を介してモータコントローラ(7)へ電流を供給し、モータコントローラ(7)からの出力電流で電動モータ(2)の出力回転速度を制御する構成とし、電力コントローラ(6)の入力側にポジションセンサ(5)を接続すると共に電力コントローラ(6)の出力側には電圧検出手段(8)を設け、電圧検出手段(8)で検出された電圧が正常値よりも低い場合にモータコントローラ(7)への電力供給を遮断する構成とする。
(もっと読む)
コンバイン
【課題】揺動選別装置の大型化、藁屑等の残留物の残留。
【解決手段】唐箕18の風量および/またはシーブ22の傾斜角度を多段階調節構成にする。車速センサ26からの車速検出値を直ぐに読み込まず、所定時間唐箕18の風量および/またはシーブ22の傾斜角度を調節せずに監視してから、車速センサ26の車速検出値を読み込み記憶し、この車速センサ26の車速検出値に応じて唐箕18の風量調節および/またはシーブ22の傾斜角度の調節を実行する。次に、一定時間経過すると、所定時間唐箕18の風量および/またはシーブ22の傾斜角度を調節せずに監視してから、車速センサ26の車速の検出値を読み込み、この今回記憶車速の検出値と前回記憶車速の検出値とを比較して唐箕18の風量および/またはシーブ22の傾斜角度を調節するコンバイン。
(もっと読む)
乗用型芝刈り車両
【課題】走行速度が変化した場合であっても芝刈り機の昇降位置を合わせることができ、高品質な芝の刈り取りが可能な乗用型芝刈り車両を提供する。
【解決手段】進行方向に対して車両の前後方向における異なる位置に配設された前側芝刈り機13a,13bと後側芝刈り機14とを備える乗用型芝刈り車両1であって、電動シリンダ26a,26bによって前側芝刈り機13a,13bを昇降させる第1昇降機構と、電動シリンダによって後側芝刈り機14を昇降させる第2昇降機構と、車両の走行速度を検出するためのセンサ34a〜34cと、センサ34a〜34cの検出結果に応じて、前側芝刈り機13a,13bの昇降位置と後側芝刈り機14の昇降位置とが一致するように第1,第2昇降機構を制御する制御部とを備える。
(もっと読む)
コンバイン
【課題】走行機体1の左右又は前後の傾斜角度の初期設定基準値(機体水平値)を簡単に認識でき、走行機体1の左右方向又は前後方向の傾斜姿勢を、走行状況等に対処して俊敏に変更できるように従来技術を改良した走行車両を提供するものである。
【解決手段】エンジン14が搭載された走行機体1に、左右又は前後の複数本の油圧シリンダ38又は177を介して、左右の走行部2を設け、走行機体1の左右及び前後の傾斜角度を変更させるコンバインにおいて、走行機体1の左右又は前後の傾斜角度の少なくともいずれか一方が初期設定基準値(機体水平値)に戻ったときに、油圧シリンダ38又は177を一旦停止させるように構成したものである。
(もっと読む)
作業車輌における制御装置
【課題】切換え(自動)スイッチで自動状態と自動切状態等の作動状態を切換える制御装置において、電源投入時の該切換えスイッチの立上り時の設定を切換える。
【解決手段】自動(ON)状態での自動スイッチのON(S2;YES)又は自動切状態での自動スイッチのON(S3;YES)で、作業中の自動制御が切換えられる(S6,S8)。電源投入による立上り設定は、自動状態から自動切(OFF)状態への切換えが、自動スイッチの長押し操作を必要とし(S4;YES、S5)、自動切状態から自動状態への切換えは通常操作で行う(S7)。
(もっと読む)
コンバインの姿勢安定装置
【課題】コンバインの走行フレーム上の重量変化を検出して実際に走行フレームが傾く前にバランス装置を作動させて機体の重心位置が変化しないようにすることで、機体の前後左右の水平を維持して、脱穀装置の選別性能を良好に維持する。
【解決手段】コンバインの走行フレーム(1)上に備えたグレンタンク(2)との機体中心対称位置に、二次元的に移動可能なバランスウエイト(3)を備えたバランス装置(4)を設け、グレンタンク(2)内に設ける穀粒センサ(S1,S2,S3,S4)の穀粒溜まり具合の検出結果に基づいて、グレンタンク(2)内の穀粒が増加しても機体全体の重心位置が変化しないように前記バランス装置(4)を作動させる構成とする。
(もっと読む)
作業車輌の警報装置
【課題】 給油中に燃料タンクから燃料がオーバーフローするのを確実に防止すると共に、キースイッチの切忘れを防止することができるようにした作業車輌の警報装置を提供する。
【解決手段】 エンジンと、燃料タンクと、主電源を入切するキースイッチと、燃料タンク内の燃料の残量を検出する残量検出手段と、エンジンの回転状態を検出する回転検出手段と、満タン警報制御手段とを備え、前記満タン警報制御手段は、キースイッチがオンでかつエンジンが停止状態にある場合で、前記残量検出手段が燃料タンク内の燃料が満量であることを検出することにより満タン警報出力し、また、前記満タン警報制御手段は、キースイッチをオンした状態で、残量検出手段が前記燃料タンク内の燃料が一度、所定値以下を検出しなければ、満タン警報出力を行わない。
(もっと読む)
作業機
【課題】作業部を備える作業機において、容易かつ効率的な操作で作業部及び機体を昇降させることができるとともに、作業部を用いた作業に速やかに移行できる構成を提供する。
【解決手段】作業機としてのコンバインが備える制御部は、主変速レバーの前進操作が検出されている場合において、刈取部が所定位置より上昇側にある状態で、刈取部昇降スイッチの上昇操作が検出されると、機体昇降シリンダによって機体を上昇させる機体上昇制御を行う。また、制御部は、機体上昇制御が行われた後に、刈取部昇降スイッチの下降操作が検出されると、機体の高さを予め設定される手動設定位置まで下降させる機体下降制御を行う。
(もっと読む)
作業機
【課題】後進時に作業部の上昇操作によって機体を上昇させる作業機において、機体の動作状況をオペレータに直感的に把握させることができる構成を提供する。
【解決手段】作業機としてのコンバインが備える制御部は、主変速レバーの後進操作が検出されている場合において、刈取部が最上端位置にある状態で、刈取部昇降スイッチの上昇側操作が検出されると、機体昇降シリンダによって機体を上昇させる機体上昇制御を行う。そして、制御部は、この機体上昇制御とともに、ブザーによって機体の上昇を報知する。この状態で、主変速レバーが前進操作に切り替えられたことが検出されると、制御部は、機体の高さを所定位置まで下降させる機体下降制御を行うとともに、ブザーによって機体の下降を報知する。
(もっと読む)
農作業機械における処理条件の自動設定
【課題】作物の生育状況に関する情報から、処理部の処理条件を自動制御し、収穫効率を向上し得る、作業性および生産性を向上させた農作業機械を提供する。
【解決手段】機体に配設した処理部wにより、処理対象に処理を施す農作業機械であって、処理部wは、制御部35によって駆動制御し、処理対象に関わる情報a,b,c,d,eを取得して、データベース化するとともに、データベースを管理、かつ提供する情報部31,31´を設け、制御部35は、情報部31,31´からの情報に基づいて、処理部wの処理条件を設定する。
(もっと読む)
コンバイン
【課題】走行機体1の傾斜姿勢が自動的に修正されることを利用して、穀物タン7ク内の穀粒の質量を高精度で計測でき、穀粒の質量の計測誤差を簡単に低減できるようにしたコンバインを提供するものである。
【解決手段】刈取装置3及び脱穀装置5及び穀物タンク7を装設した走行機体1と、走行機体1の左右方向又は前後方向の傾斜姿勢を修正する傾斜姿勢アクチュエータとしての車高調節油圧シリンダ38又は前後傾斜用油圧シリンダ177と、穀物タンク7の質量を計測する計量手段としての計量器399を備えるコンバインにおいて、走行機体1の左右方向又は前後方向の傾斜姿勢が自動的に修正されることによって、走行機体1が水平姿勢に維持されているときに、計量器399によって穀物タンク7の質量が計測されるように構成したことを特徴とする。
(もっと読む)
コンバイン
【課題】
刈取作業中の穀稈引起しラグの運動エネルギーを回生して発電し、補助エネルギーとして利用することで、コンバインの燃費低減を図る。
【解決手段】
走行装置(2)と作業部にエンジン(E)動力を伝達すると共に、作業部を電動モータ(17)で駆動するようにし、エンジン(E)により発電機モータ(24)を駆動して発電して蓄電池(14b)に蓄電し、エンジン(E)の過負荷時に電動モータ(17)を駆動するコントローラ(23)を設け、刈取搬送部(7)に設けた多数の引起しラグ(26c)が、ゴム製の収納ガイド(27)に衝突して引起しケース(26a)内に収納される際に、収納ガイド(27)を介して衝撃発電素子(28)を振動させて発電し、蓄電池(14b)に蓄電する。
(もっと読む)
コンバイン
【課題】圃場の隅部で未刈穀稈を刈り取るコンバインの隅刈作業を行う場合、隅刈作業を自動的に行うことを可能として、操縦者の操作負担を軽減する。すなわち操縦者の操作技術に拘らず円滑な隅刈作業を行うことを可能とし、圃場の隅部での作業性を向上することが可能なコンバインを提供する。
【解決手段】コンバイン1において、圃場の隅刈りを自動的に行うモードである自動隅刈りモードを実行する手段であって、制御装置200と接続されるスタートボタン153(隅刈り操作手段)を備え、自動隅刈りモードにおいて制御装置200は、刈取部4を上昇させてから、機体を所定距離後進させて停止させ、刈取部4を下降させてから、機体を所定角度旋回させて刈り取りしながら所定距離前進させて停止させる作業動作を、設定回数行うように制御する。
(もっと読む)
作業車輌の車高制御装置
【課題】車高制御上の下降限界位置の調整を容易に行えるものとする。
【解決手段】左右の走行装置と機台を左右の機台昇降シリンダ(20,21)で接近および離間するように装着し、車高制御コントローラ(14)で機台昇降シリンダ(20,21)を伸縮制御して機台の水平を維持する車高制御装置において、車高を設定する車高設定ダイヤル(4)をダイヤル表示の最下位置を越えて回すと、車高センサ(5,6)が下降限界を検出しても機台昇降シリンダ(20,21)を縮め駆動して左右の走行装置と機台が当接する機械的な下降限界位置まで機台を降下させる構成とする。
(もっと読む)
走行車両
【課題】走行機体1とトラックフレーム21の連結構造を簡単に構成できるものでありながら、トラックフレーム21に装着した走行部2と走行機体1とが干渉するのを簡単に防止できるようにした走行車両を提供するものである。
【解決手段】走行部2を有する走行機体1と、走行機体1の左右方向の傾斜姿勢を修正するローリングアクチュエータ38と、走行機体1の前後方向の傾斜姿勢を修正するピッチングアクチュエータ177を備えた走行車両において、走行機体1が最下げ位置に支持されているときに、ローリングアクチュエータ38を車高上げ動作させて、走行機体1を所定高さ位置に支持した状態で、ピッチングアクチュエータ177を前傾動作又は後傾動作させるように構成したものである。
(もっと読む)
コンバイン
【課題】安価で、しかも刈取部の高さの制御が容易な掻込リールを装着したコンバインを提供することである。
【解決手段】機体の前側に配置した穀稈を刈り取る刈取部4の底部に設けた接地を検出する接地センサ40と刈取部4の対機体高さを検出する刈取高さセンサ66と刈取部4を機体に対して昇降自在に装着する昇降シリンダを備え、刈取部4の機体に対する高さを設定する刈取高さ設定ダイヤル52により設定された刈取部4の機体に対する高さに応じて接地センサ40と刈取高さセンサ66による検出値のいずれか一方に基づいて刈取部4の機体に対する高さの制御を行う制御装置60を設けたコンバインであり、刈取部4の機体に対する高さに応じて2つの高さセンサ40,66を使い分けることで制御操作が簡単となり、刈取部4の高さ制御のための部品点数が従来より少なくて済む。
(もっと読む)
コンバインの刈高さ制御装置
【課題】コンバインの刈高さ制御装置において、穀稈の刈高さの変動を少なくし、刈取搬送部の地面への突込みを防止する。
【解決手段】接地センサSE1と刈高さポジションセンサSE2とで刈取搬送部の刈高さを設定機体高さに昇降制御する刈取搬送部昇降制御手段を備え、接地センサSE1が刈取搬送部の地面への接地を検出すると、接地センサSE1が接地検出をしなくなるまで刈取搬送部を所定高さに上昇させる。次いで、上昇後所定時間あるいは所定距離走行した後に、刈取搬送部を設定対機体高さまで低速で下降させるコントローラ20を備える。
(もっと読む)
41 - 60 / 166
[ Back to top ]