
Fターム[2B076ED30]の内容
収穫機本体(機枠、駆動) (12,770) | 制御対象 (1,228) | その他の制御対象 (166)
Fターム[2B076ED30]に分類される特許
21 - 40 / 166
コンバイン
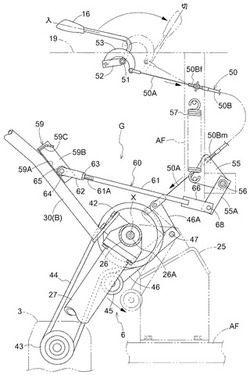
【課題】刈取部の上昇に連動して刈取クラッチを入り状態から切り状態に切り換える連動操作機構を少ない部品点数で組み立てやすく構成する。
【解決手段】刈取クラッチ6のテンションアーム46と、刈取クラッチレバー16とを操作ワイヤ50のインナーワイヤ50Aで連結し、この操作ワイヤ50のアウターワイヤ50Bの一端を中間部材55に連結した。刈取部Bに備えた規制部材59Cと中間部材55との間に作動部材60を備え、刈取部Bが設定レベルを超えて上昇した場合に作動部材60の先端に規制部材59Cを当接させ、作動部材60から中間部材55に押圧力を作用させ、この中間部材55の揺動により刈取クラッチ6の切り操作を行うように構成した。
(もっと読む)
コンバイン

【課題】刈取作業をおこなう内にコンデンサケースの吸気口に設けた防塵網に塵埃が吸い付いてエアコン装置の効率が下がってしまうので、エンジンを停止して防塵網に吸い付いた塵埃を除去する必要があった。
【解決手段】コンデンサ冷却制御手段(61A)を停止してコンデンサファン(48)を逆転駆動制御して、コンデンサファン側開口部(51a)から吸気した空気をコンデンサ側開口部(52a)から排気することでコンデンサ側防塵網(52b)に吸い付いた塵埃を除塵するコンデンサ除塵制御手段(61B)を設けた。
(もっと読む)
作業車両
【課題】傾斜検出手段の検出結果に基づき、水平方向に対して走行機体を予め定めた所定の左右傾斜角で保持する傾斜制御を実行する作業車両において、左右旋回走行時に傾斜制御が実行されることによる不具合を除去するとともに、走行速度が高速の場合でも、オペレータが傾斜制御の応答遅れを感じない、或いは感じ難い作業車両を提供する。
【解決手段】制御部は、操向レバーの左右の各揺動範囲における中立位置に近い側を非規制範囲とするとともに中立位置から遠い側を規制範囲とし、操作位置検出手段によって操向レバーが左右何れかの規制範囲に揺動されたことが検出された場合には、傾斜制御の実行を停止する一方で、前記操作位置検出手段によって操向レバーが左右何れかの非規制範囲に揺動されたことが検出された場合には、傾斜制御の実行を継続する。
(もっと読む)
コンバイン
【課題】車高が低下調節がされた場合にも刈取装置の高さ位置を確保できるコンバインを提供する。
【解決手段】コンバインは、車高調節部11を介して機体フレーム1aを高さ調節可能に支持する走行装置3と、機体フレーム1aの前部の刈取昇降部14を介して昇降調節可能に穀稈を刈取る刈取装置4とを備えて構成され、車高調節部11による調節高さを検出する車高検出部11sと、刈取昇降部14による昇降高さを検出する刈取昇降検出部14sと、前記車高調節部11及び刈取昇降部14の動作を制御する制御部Cとを設け、該制御部Cは、前記車高調節部11への下降出力の開始と前記車高検出部11sによる下降側への高さ変化とのうちの何れかが検出され、且つ、刈取昇降検出部14sによる高さが設定値未満となった場合に、前記刈取昇降検出部14sの検出値が設定値以上となるまで前記刈取昇降部14に上昇出力を行なう構成としたものである。
(もっと読む)
作業車輌
【課題】エンジンからHSTに動力伝達する無端体に作用するテンションプーリーを支持する揺動アームが付勢部材によって常時張力付与方向へ付勢されている作業車輌において、エンジン始動性の向上及び走行ブレーキ機構の制動力付加時におけるHSTの確実な出力停止を図る。
【解決手段】人為操作に応じて前記付勢部材の付勢力に抗して張力解除方向へ前記揺動アームを揺動させる張力操作機構を備えると共に、前記張力操作機構が、人為操作可能な切換部材によって、前記ブレーキ操作部材のブレーキ作動方向への動きに連動して前記揺動アームを張力解除方向へ揺動させる連動モードと前記ブレーキ操作部材との連動関係が解除された解除モードとに切り換えられるように構成する。
(もっと読む)
コンバイン
【課題】コンバインでの手扱ぎ作業時に、脱穀装置に設ける風割の自動制御を一時的に停止して、一時的な脱穀処理物の増減による穀粒の収穫ロスを無くする。
【解決手段】唐箕(37)から揺動選別棚(37)に至る選別風送風経路内に、揺動選別棚(1)の後部に送風される選別風量よりも揺動選別棚(1)の前部に送風される選別風量の方が多い状態と、揺動選別棚(1)の前部に送風される選別風量よりも揺動選別棚(1)の後部に送風される選別風量の方が多い状態とに切換える送風方向変更手段(9)を設け、走行停止検出手段(D)が機体の走行停止状態を検出し、且つ、脱穀クラッチセンサ(52)が脱穀装置(15)の駆動状態を検出した場合に、送風方向変更手段(9)を揺動選別棚(1)の後部に送風される選別風量よりも揺動選別棚(1)の前部に送風される選別風量の方が多い状態に自動的に切換える。
(もっと読む)
コンバイン
【課題】例えば圃場の一辺を刈り終えて旋回する際に、揺動選別棚上の処理物中の穀粒が藁屑と共に機外へ排出されにくいものとし、穀粒の回収効率を高める。
【解決手段】高さ検出手段(4l)によって非刈取作業高さが検出された場合に刈取装置(4)駆動用の第1クラッチ(4h)を自動的に遮断し、高さ検出手段(4l)によって非刈取作業高さが検出され且つ層厚検出手段(96)によって予め設定した層厚よりも薄い層厚が検出された場合には第1クラッチ(4h)の遮断に加えてフィードチェン(13B)及び揺動選別棚(20)駆動用の第2クラッチ(20m)を自動的に遮断する制御装置(CU)を設ける。
(もっと読む)
コンバイン
【課題】カッター部の下方に備えられたガイドカバーの下端排出口部から圃場面に近接する高さ位置までを覆う防塵カバーを設けることによって、切断藁の飛散、藁屑の浮遊を防止する。
【解決手段】脱穀装置(3)の後部に脱穀後の排藁を切断処理する排藁細断装置(7)を備えたコンバインにおいて、排藁細断装置(7)の下部に左右側部のサイドカバー(9a,9b)と後部のリアカバー(9c)とからなる切断藁排出案内用のガイドカバー(9)を設け、ガイドカバー(9)の下端に形成された切断藁の排出口(10)部の左右及び後側に、排出口(10)から圃場面に近接する高さ位置までを覆う防塵カバー(11)を設ける。
(もっと読む)
コンバイン
【課題】刈取装置のみを駆動して整備点検を行う場合に、機体を確実に停止させて整備作業の安全性を向上させる。
【解決手段】駆動速度を無段階に変速可能な刈取装置(6)と、変速手段(10)の操作位置に応じて走行速度を変速する走行装置(3)を設け、走行装置(3)の走行速度が増速するほど刈取装置(6)を高速で駆動する構成としたコンバインにおいて、変速手段(10)の変速操作位置を検出する変速位置検出手段(10a)を設け、変速手段(10)の中立状態が検出されると刈取装置(6)のみを駆動可能にする刈取整備運転モードに移行可能な構成とする。
(もっと読む)
コンバイン
【課題】脱穀室から排出される被処理物が揺動棚上で絡まって、揺動選別棚上の被処理物の効率および精度が低下する。
【解決手段】走行装置2の上方に脱穀装置3を設け、走行装置2の前方に刈取装置5を設け、前記脱穀装置3は、扱胴20を軸装した脱穀室14の下方に唐箕22と該唐箕22からの送風により穀粒と異物とを選別する揺動選別棚24を設け、該揺動選別棚24の終端上方に前記唐箕22からの送風を吸引する吸引排塵ファン34を設け、該吸引排塵ファン34と前記脱穀室14の排出口48との間には左右方向の軸心を中心として駆動回転する拡散胴55を設け、該拡散胴55と前記脱穀装置3の脱穀室14に穀稈を供給搬送する穀稈供給搬送装置12とは走行速度に応じて回転速度を変更するようにしたコンバイン。
(もっと読む)
コンバイン
【課題】電動モータを駆動源とするコンバインにおいて、従来の旋回操作方法を変更することなく、急旋回や緩旋回等の旋回を行えるようにして、圃場作業における操縦性を高める。
【解決手段】左右のクローラ走行装置(3R,3L)を変速可能な左右の電動モータ(5R,5L)で夫々駆動すると共に該クローラ走行装置(3R,3L)を制動する左右のブレーキ(6R,6L)を設け、操縦席に立設する操向レバー(21)の左右傾倒角度に応じて該操向レバー(21)を傾倒した側の電動モータ(5R又は5L)の回転速度を減速させ、操向レバー(21)の傾倒角度が設定角度に達した場合にブレーキ(6R又は6L)を作動させて傾倒側のクローラ走行装置(3R又は3L)の回転を停止させる構成とする。
(もっと読む)
コンバイン
【課題】複数顧客の各コンバインのトラブルの発生を適正に予知でき、各コンバインのメンテナンス作業性等を向上できるようにしたコンバインを提供するものである。
【解決手段】エンジン14を搭載した走行機体1と、扱胴226を有する脱穀装置5と、扱胴226に刈取穀稈を供給する刈取装置3を備えたコンバインにおいて、エンジン14の作動状況を検出するセンサ61,62,63,64と、脱穀装置5の作動状況を検出するセンサ65,66と、刈取装置3の作動状況を検出するセンサ67と、管理場所に設置された受信手段75に前記各センサ61〜67の検出内容を送信する送信手段72を設けたものである。
(もっと読む)
コンバイン
【課題】コンバインで手扱ぎ作業を行っている際に、作業者の衣服等がフィードチェンに巻き込まれにくくする技術を提供する。
【解決手段】エンジン(14)の駆動力を分岐して各作業装置を駆動するコンバインにおいて、脱穀装置(4)のフィードチェン(12)の駆動経路に動力の伝動を断続するフィードチェン駆動クラッチ(29)を設けると共にこのフィードチェン駆動クラッチ(29)の伝動下手側にフィードチェンブレーキ(31)を設け、手扱ぎ作業時に作業者が操作可能なコンバインの機体側部の位置に、フィードチェン駆動クラッチ(29)とフィードチェンブレーキ(31)を同時に作動させる緊急停止操作具(43)を設ける。
(もっと読む)
コンバイン
【課題】速やかにセルモータを介してエンジンを始動させて、作業を再開すること。
【解決手段】直進用無段変速機と旋回用無段変速機により駆動制御して直進走行と旋回走行とが行えるようにした走行部と、刈取部・脱穀部・選別部・排藁処理部等の作業部とを有して、これら走行部と作業部をエンジンからの駆動力により作動させるとともに、走行部と作業部に発生する過負荷の検出結果に基づいて、エンジンの停止信号を発信することでエンジンを停止させるように制御しているコンバインであって、直進用無段変速機が有する可動斜板は、エンジンの停止信号に連動して中立姿勢に強制的に復帰されるようにした。
(もっと読む)
コンバイン
【課題】走行用および刈取用の静油圧式無段変速装置の変速制御によって、圃場への進入時における穀稈の刈取を円滑に行えるものとする。
【解決手段】変速レバー(70)の変速操作域の中間位置に所定幅の中立域(T)を設定し、操作位置検出装置(71)で検出される変速レバー(70)の変速操作位置が中立域(T)から外れた場合に、該変速レバー(70)の変速操作位置に応じて走行装置駆動用の第1静油圧式無段変速装置(20)を自動的に変速作動させ、走行速度検出装置(73)で検出される走行速度に同調させて刈取搬送装置駆動用の第2静油圧式無段変速装置(21)を自動的に変速作動させ、変速レバー(70)が中立域(T)内に操作されているにも拘わらず、走行速度検出装置(73)によって走行状態が検出された場合に、第2静油圧式無段変速装置(21)の出力を自動的に開始させる。
(もっと読む)
収穫機
【課題】作物の上端部の高さに適切に対応して取入部の高さを調整可能な収穫機を提供する。
【解決手段】コンバイン(収穫機)は、本体と、取入部と、収穫部昇降シリンダ18と、を備える。取入部は、立毛状態の作物から必要部分を分離して取り入れる。収穫部昇降シリンダ18は、取入部を本体に対して昇降させる。本体は、作物の上端部を検出する超音波センサ17を備える。そして、収穫部昇降シリンダ18は、超音波センサ17の検出結果に基づいて、取入部を昇降させる。
(もっと読む)
コンバイン
【課題】穀粒量検出センサの出力から外乱の影響を除去することができるコンバインを提供する。
【解決手段】一番スクリューコンベア23の回転数に基づいて投口センサ23aの検出結果を補正することによって、投口センサ23aの検出結果から外乱の影響を抑制し、穀粒タンク4に貯留した穀粒量を精度良く検出することができる構成とした。また投口センサ23aは圧力センサである場合、圧力センサへ作用する穀粒からの圧力は、穀粒量が同じであっても、一番スクリューコンベア23の回転数によって異なるが、当該差異を補正することによって、投口センサ23aの検出精度を高めることができる構成とした。
(もっと読む)
コンバイン
【課題】圧力検出手段の検出結果及び穀粒量の関係を示す関数に、圧力検出手段の取付位置及び取付姿勢、並びに刈取る品種に応じた適切な係数を使用し、貯留部に貯留する穀粒量を正確に検出することができるコンバインを提供する。
【解決手段】投口センサ23aの検出結果及び演算して求めた穀粒量に基づいて未知係数を求めて、実関数を導出し、投口センサ23aの穀粒タンク4への取付位置並びに取付姿勢の差異、及び刈取る品種などの諸条件に応じた適切な実関数を穀粒量の検出に使用する構成とした。
(もっと読む)
作業車の表示装置
【課題】エンジン回転数及び累積稼動時間を使用者が識別し易い状態で表示することが可能でありながらも、低コスト化を図ることが可能な作業車の表示装置を提供する。
【解決手段】エンジン回転数及び累積稼動時間を表示する数値表示部27が複数桁の数字と小数点とを表示可能に構成され、数値表示部27の作動を制御する制御手段が、エンジン回転数を表示する回転数表示状態と累積稼動時間を表示する稼動時間表示状態とに切り換える形態で、且つ、稼動時間表示状態では小数点並びに小数点以下の数字を表示し、回転数表示状態では小数点並びに小数点以下の数字を表示しない形態で、数値表示部27を作動させるように構成されている。
(もっと読む)
コンバイン
【課題】搬送車輌への積み降ろし作業などが容易なコンバインを提供する。
【解決手段】作業切替ダイヤルが積載位置に切替えられると、制御部は積載モードへと切替る(タイミングl)。積載モードになると制御部は、エンジンの回転速度を、作業時に使用可能な回転速度域よりも低い設定低回転速度に設定すると共に、車高を最上げ位置に設定する。また、制御部は、前処理部を最下降位置に設定すると共に、ナローガイドも作業位置から収納位置へと切替える。
(もっと読む)
21 - 40 / 166
[ Back to top ]