
Fターム[2F069AA93]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 物品の姿勢 (54)
Fターム[2F069AA93]に分類される特許
1 - 20 / 54
姿勢検出装置および姿勢検出方法
位置計測装置及び位置計測システム
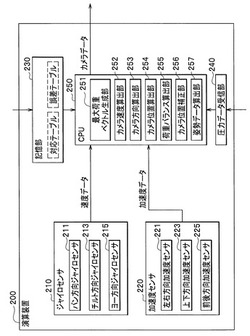
【課題】本発明は、機動性に優れ、平坦でない計測基準面でも、高い精度で位置データを素早く計測できる位置計測装置を提供する
【解決手段】演算装置200は、カメラ速度と最大荷重領域の速度とを対応付けた対応テーブルを記憶する記憶部230と、足裏圧力が最大となる最大荷重領域の時間変化により最大荷重ベクトルを生成する最大荷重ベクトル生成部251と、対応テーブルを参照して、最大荷重ベクトルが示す最大荷重領域の速度から、カメラ速度を算出するカメラ速度算出部252と、最大荷重ベクトルが示す最大荷重領域の方向を、カメラ方向として算出するカメラ方向算出部253と、カメラ速度と、カメラ方向とに基づいて、カメラ位置を算出するカメラ位置算出部254と、を備える。
(もっと読む)
表示装置、電子機器、およびプログラム

【課題】互いに異なる複数の面に表示部を有する場合であっても、それぞれの表示部の表示面に対面する複数の方向に位置する操作者に応じて適切な制御をすることができる表示装置を提供する。
【解決手段】表示装置は、互いに表裏の位置関係に表示面が配置されている第1表示部および第2表示部と、第1表示部または第2表示部の表示面に対する操作者の相対位置を検出し、検出した相対位置に基づいて、第1表示部および第2表示部のうち、操作者に対面する表示部の表示面が表面であると検出するとともに、他方の表示部の表示面が裏面であると検出する検出部と、検出部により検出された結果に基づいて、表面の表示部または裏面の表示部の表示を制御する制御部と、を備える。
(もっと読む)
物体に対するプローブの姿勢を、該プローブを用いて該物体をプロービングすることによって求めるための方法およびシステム
【課題】物体に対するプローブの姿勢を、プローブを用いて物体をプロービングすることによって求めるためのシステム及び方法を提供する。
【解決手段】ラオ・ブラックウェル化パーティクルフィルタリングを使用して姿勢の確率を求めるステップであって、姿勢のロケーションの確率が前記パーティクルのロケーション212によって表され、姿勢の配向の確率が、各パーティクルのロケーションを条件とするパーティクルの配向にわたるガウス分布215によって表され、姿勢の確率が特定の姿勢の周りに集中するまで、後続のプロービングごとに実行されるステップと、特定の姿勢に基づいて物体に対するプローブの姿勢を推定するステップとを含む。
(もっと読む)
カメラ校正装置
【課題】周囲の景色によらずカメラの撮像方向を校正することができるカメラ校正装置を提供する。
【解決手段】イメージセンサ140を有するカメラ120と、イメージセンサ140と既知の位置関係にある加速度センサ150と、イメージセンサ140が静止しているときに加速度センサ150によって検知された傾きとイメージセンサ140が移動しているときに加速度センサ150によって検知された傾きとに基づいて、カメラ120の撮像方向を算出するカメラ校正部160とを備える。
(もっと読む)
画像から平面を検出する平面検出装置及び検出方法
【課題】車両の揺動が激しい場合でも、射影変換行列Hの初期値を短時間かつ正確に推定することができる画像から平面を検出する平面検出装置及び検出方法を提供する。
【解決手段】移動体の姿勢角を検出するステップと、検出した姿勢角を用いて記憶された平面の法線ベクトルnを修正するステップとを有する。法線ベクトルnを修正するステップにおいて、前時刻(t−1)における姿勢角を用いてカメラ座標系Cの法線ベクトルn(t−1)を慣性座標系Eの法線ベクトルnE(t−1)に変換し、次いで、現時刻(t)における姿勢角を用いて慣性座標系Eの法線ベクトルnE(t−1)をカメラ座標系Cの法線ベクトルn(t)に変換する。
(もっと読む)
動き検出装置および方法
【課題】 動き検出装置および方法を提供する。
【解決手段】 1つ以上の第1回転角測定センサを用いて第1角を測定し、1つ以上の第2回転角測定センサおよび前記1つ以上の第1回転角測定センサと相違する1つ以上の2軸の角速度センサを用いて第2角を推定し、1つ以上の第3回転角測定センサおよび前記1つ以上の2軸の角速度センサを用いて前記2軸のうちのいずれか1つである第3角を推定する動き検出装置を提供する。
(もっと読む)
携帯端末
【課題】 空間的に離間した複数の撮影点で同じ対象物を被写体として撮影して撮影点間の相対位置を判定することができる携帯端末を提供する。
【解決手段】 被写体を撮影して静止画像を生成するカメラ16と、カメラ16の光軸の向き及び光軸を中心とする傾きを検出する姿勢検出部32と、静止画像から特徴点を抽出する特徴点抽出部24aと、静止画像内の特徴点に対応する被写体上の点及び当該静止画像の撮影が行われた撮影点間の距離を測定する距離測定部25と、第1撮影点で撮影された第1画像内の特徴点について測定された距離、第2撮影点で撮影された第2画像内の上記特徴点について測定された距離、並びに、第1撮影点及び第2撮影点でのカメラ16の向き及び傾きの各検出結果に基づいて、第1撮影点に対する第2撮影点の相対位置を判定する位置判定部26により構成される。
(もっと読む)
加速度センサ用補正装置
【課題】車両に搭載される加速度センサの出力値を正確に補正する補正装置を提供する。
【解決手段】車両20に加わる第1の加速度を測定する加速度センサ221と、車両に設置された位置検出手段220又は速度センサとに接続され、制御手段210と記憶手段222を備える加速度センサ用補正装置(ナビゲーション装置)200であって、制御手段210は、位置検出手段220又は速度センサからの出力をもとに第2の加速度を算出し、第1の加速度と第2の加速度とから求められる差分又は車両の傾き等のパラメータを記憶手段222に逐次記憶し、車両の累積走行距離が所定値に達した際に、記憶されたパラメータの平均値を算出し、この平均値を補正値として加速度センサ221を補正する。
(もっと読む)
地図画像統合データベース生成システム及び地図画像統合データベース生成プログラム
【課題】移動体に固定された軸を使用せず、任意の方向にある撮影対象物の位置を取得することができる撮影対象位置特定装置、地図画像統合データベース生成装置及び撮影対象位置特定プログラムを提供する。
【解決手段】撮影装置10が撮影対象を撮影すると、制御装置16は、この画像情報とともに、撮影装置10のシャッターに同期あるいは非同期で角度距離計測器12が計測した撮影装置10の撮影位置と撮影対象との距離データと撮影装置10の撮影方向の方位角及び仰俯角を取得する。また、上記シャッターに同期あるいは非同期で、座標計測装置14から撮影装置10の撮影位置の座標情報を取得する。次に、制御装置16は、上記取得した、距離データ、方位角及び仰俯角のデータ及び座標情報のデータに基づいて、撮影対象の座標情報を演算する。また、撮影対象の画像情報及びその座標情報は、互いに関連付けて出力する。
(もっと読む)
情報処理装置及びキャリブレーション処理方法
【課題】カメラ内部パラメータやカメラ間の相対位置姿勢が変化した場合に、仮想現実空間の表示が観察者へ悪影響を及ぼすことを未然に防ぐことを可能とする。
【解決手段】
主撮像装置と副撮像装置により現実空間を撮影して得られた画像に仮想画像を合成して立体視のための画像を提供する情報処理装置は、主撮像装置の位置姿勢を計測し、保持部により保持されている装置間位置姿勢情報と計測された主撮像装置の位置姿勢とに基づいて副撮像装置の位置姿勢を算出し、計測された主撮像装置の位置姿勢と算出された副撮像装置の位置姿勢と保持されている主撮像装置及び副撮像装置の内部パラメータとを用いて、主、副撮像装置のそれぞれから得られた画像に仮想画像を合成する。情報処理装置は、主、副撮像装置により撮像された画像に基づいて、保持されている装置間位置姿勢情報や内部パラメータの情報の正当性を判断し、不当と判断した場合には保持されている情報を校正する。
(もっと読む)
位置検出装置、位置検出方法及びプログラム
【課題】プライバシー問題に影響されることなく計算コストを抑制しながら空間内における人の位置と向きを検出可能な位置検出装置を提供する。
【解決手段】 位置検出装置10は、空間に設置され、空間内に位置する人との距離を非接触で測定する複数の距離センサ11〜14と、複数の距離センサ11〜14から所定の時間間隔で取得される距離情報に基づき、空間内における人の位置および向きを所定の演算により検出する演算制御装置16とを含む。
(もっと読む)
姿勢検出装置の補正パラメーター作成方法、姿勢検出装置の補正パラメーター作成用装置及び姿勢検出装置
【課題】センサーの取付角誤差に起因する検出値の誤差を補正するための補正パラメーターをより低コストで作成可能な姿勢検出装置の補正パラメーター作成方法、補正パラメーター作成用装置及び補正機能付きの姿勢検出装置を提供すること。
【解決手段】回転板230を上面231が水平になるように設置し(S10)、立方体治具210の面211に、X軸(第1の軸)が面212(第2の面)に垂直になり、Y軸(第2の軸)が面213(第3の面)に垂直になり、Z軸(第3の軸)が面211(第1の面)に垂直になるように、姿勢検出装置1を固定する(S12)。そして、立方体治具の面212、213、211と対向する各面を回転板の上面に順次固定し(S14、S20、S26)、回転板を静止又は所定の角速度で回転させて姿勢検出装置の検出値を取得し(S16、S18、S22、S24、S28、S30)、補正パラメーターを作成する(S32)。
(もっと読む)
バンク角制限装置
【課題】車両の挙動量が大きく変化する場合、あるいは、カーブが逆バンクである場合に、推定バンク角を制限して、該推定バンク角の値が不安定に陥らないようにする。
【解決手段】バンク角制限装置10Aは、ローパスフィルタ16を備えるローパスフィルタ部12と、車両の挙動量が所定の閾値よりも大きいか否かを判定する車両挙動判定部14とを有し、ローパスフィルタ部12は、前記挙動量が前記閾値よりも大きいと車両挙動判定部14が判定したときに、前記車両に搭載されたバンク角推定装置が推定した路面の推定バンク角をローパスフィルタ16を介して出力し、一方で、前記挙動量が前記閾値以下であると車両挙動判定部14が判定したときに、前記推定バンク角を直接出力する。
(もっと読む)
センサドリフト量推定装置
【課題】車両運動の状態に関わらず、安定してセンサのドリフト量を推定することができるようにする。
【解決手段】姿勢角オブザーバ24によって、各センサの検出値に応じたセンサ信号に基づいて、車体の鉛直軸に対する姿勢角の微分量を算出する。運動方程式微分量算出手段26によって、センサ信号及び姿勢角オブザーバ24によって推定された姿勢角に基づいて、車両運動の運動方程式より得られる姿勢角の微分量を算出する。ドリフト量推定手段28によって、センサ信号のセンサドリフト量を考慮したときに、姿勢角オブザーバ24により算出された姿勢角の微分量と、運動方程式微分量算出手段26により算出された姿勢角の微分量にセンサドリフト量を考慮した値とが等しくなる関係を用いて、各センサ信号のセンサドリフト量を推定する。ドリフト量補正手段22によって、推定されたセンサドリフト量に基づいて、各センサ信号を補正する。
(もっと読む)
モーショントラッカ装置
【課題】光学マーカーに識別情報を持たせたり、1個1個順番に点灯させたりすることなく、各光学マーカーを確実に識別することができるモーショントラッカ装置を提供する。
【解決手段】 モーショントラッカ装置1であって、対象物10に作用する対象物角速度を短時間で検出する対象物角速度検出センサ4と、対象物10に作用する対象物加速度を短時間で検出する対象物加速度検出センサ5と、第一座標系の角度移動量を算出する第一座標系角度移動量算出部23と、第一座標系の位置移動量を算出する第一座標系位置移動量算出部27と、光学マーカー位置情報、第一座標系の角度移動量及び第一座標系の位置移動量に基づいて、光学マーカーの予想移動位置を推定する光学マーカー推定部26とを備え、光学マーカー位置情報算出部24は、光学マーカーの予想移動位置に基づいて、3個以上の光学マーカー7をそれぞれ識別することを特徴とする。
(もっと読む)
位置決め装置
【課題】特定のエリアでは高い位置決め精度を確保しつつ、全体として比較的安価な位置決め装置を提供する。
【解決手段】 位置制御されるスライダ1と、このスライダ1と対向する面に磁極の歯が形成されてスライダ1と平面モータを構成するプラテン10とを備えた位置決め装置において、
スライダ1の位置を検出するレゾルバ30a〜30c(以下レゾルバ30とする。)と、
プラテン10の特定のエリアAにおけるスライダ1の位置をレゾルバ30よりも高い精度で検出するレーザ干渉計20a,20b(以下レーザ干渉計20とする。)と、
スライダ1の位置に応じてレゾルバ30またはレーザ干渉計20のいずれかの位置検出装置を選択する切替スイッチ100cと、
位置指令値および切替スイッチ100cで選択された位置検出装置で検出される位置検出値に基づいてスライダ1の位置制御を実行する位置制御部102と、
を備えたことを特徴とする位置決め装置。
(もっと読む)
姿勢・移動軌跡検出装置、検出方法、プログラムおよび記録媒体
【課題】物体に装着したセンサノードからのデータを利用して物体の姿勢および移動軌跡を検出する。
【解決手段】姿勢・移動軌跡検出装置1は、物体が運動しているアクティビティ区間の前後の静止区間のセンサデータから物体の姿勢を静止区間の各々について推定する静止姿勢推定部13と、物体の姿勢に基づいてアクティビティ区間の各時刻における物体の姿勢を補間により推定する運動姿勢推定部14と、アクティビティ区間の各時刻について運動姿勢推定部14が推定した物体の姿勢における重力加速度を推定する重力加速度推定部15と、アクティビティ区間の各時刻についてセンサデータと重力加速度とから、外力により生じる物体の加速度を推定する運動加速度推定部16と、物体の加速度からアクティビティ区間における物体の移動速度および移動量を求める移動軌跡推定部17とを備える。
(もっと読む)
姿勢角検出装置
【課題】取付位置にずれが生じたときにも取付部位の姿勢角を正確に検出することができる姿勢角検出装置を提供する。
【解決手段】人体の部位100の姿勢角を検出する姿勢角検出装置10であって、姿勢角センサ20と、移動量検出手段31、32と演算手段60を備えている。姿勢角センサ20は、人体の部位100の表面に取り付けられ、自己の姿勢角を検出する。移動量検出手段31、32は、取付部位100の表面を移動したときの姿勢角センサ20の初期位置からの移動量を検出する。演算手段60は、検出された姿勢角を検出された移動量に基づいて補正する。
(もっと読む)
長軸部を有する物体の長軸部の先端座標と該物体の位置姿勢を定義する手段との3次元相対関係測定方法およびシステム
【課題】 3次元形状測定精度が通常の環境下でも、手術器具のように長軸部を有する物体の先端部と位置姿勢検出用の標識部との3次元相対関係を精度良く較正できる。
【解決手段】 被測定物体10の長軸部の先端部と第1標識部12との3次元相対関係測定方法であって、較正用物体20を被測定物体の長軸部の先端部に取付けるステップと、3次元形状測定装置により被測定物体および較正用物体の立体形状データ群を測定するステップと、立体形状データ群から第1標識部の位置および姿勢と第2標識部21,22,23の位置および立体形状とを算出するステップと、第2標識部の位置および立体形状と当接部と第2標識部との3次元相対関係とに基づいて当接部24の3次元座標を算出するステップと、第1標識部の位置および姿勢と当接部の3次元座標とに基づいて被測定物体の長軸部の先端部と第1標識部との3次元相対関係を算出するステップと、を有する。
(もっと読む)
1 - 20 / 54
[ Back to top ]