
Fターム[3D232EB11]の内容
走行状態に応じる操向制御 (73,124) | 制御対象(制御量) (5,762) | 操舵力 (2,579)
Fターム[3D232EB11]の下位に属するFターム
Fターム[3D232EB11]に分類される特許
21 - 40 / 1,811
ハイブリッド車両のパワーステアリング装置
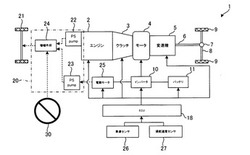
【課題】ハイブリッド車両の走行状態に関わらず、良好な燃費性能を確保しつつ、大きな操舵トルクを出力可能なハイブリッド車両のパワーステアリング装置を提供する。
【解決手段】ハイブリッド車両1のパワーステアリング装置20は、モータ回生走行時やモータ発進時にエンジン2が停止状態にあり、且つ、クラッチ3が切断状態にある場合、ハイブリッド車両1の走行速度に応じて、パワーステアリング装置において操舵トルクを増幅する増幅手段24の駆動源である、電動モータ25とエンジン2を選択的に切り替える。
(もっと読む)
操舵機構の制御装置

【課題】駆動モータ9の駆動指示量が全開に近い状態のときに、前進・後退を切換えるシフト操作を行うと、車両に慣性力が残っており、駆動輪5を駆動する駆動モータ9に多くの電力を要する。この状態にあるとき転舵モータ19の消費電力が大きいと、駆動輪5の駆動用の電力が不足するおそれがある。
【解決手段】駆動輪5を駆動する駆動モータ9の制御量を指示するアクセルペダル25の開度を検出し、前記アクセル開度が所定値以上であり、かつ、シフトレバー24の操作によって前進・後退切り換え信号の入力がある状態では、前記前進・後退切り換え信号の入力から所定の時間T以内において、前記転舵モータ19の駆動電流を、通常の駆動電流に対して減少する側に設定する。
【効果】シフト操作後の所定時間T以内において、転舵モータ19の駆動電流を、通常の駆動電流に対して減少する側に設定することにより、駆動輪の駆動用の電力の不足を解決する。
(もっと読む)
電動パワーステアリング装置
【課題】不良品を市場に出荷するのを防止することができると共に、安全な状態の内に部品を交換して、安全性や快適性を高めることのできる電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置において、各部の異常診断を行い、確定した異常である場合は異常確定信号を出力し、不確定異常である場合は異常判断信号を出力する複数の異常診断手段を設け、コントロールユニットに接続された検査装置からコントロールユニットに電力を供給して、異常診断を実行する。それぞれに割り当てられた診断時間の間、各部の検出した異常が確定した異常である場合に異常確定信号を出力する異常検出部と、確定に至らない不確定異常を異常検出部が検出した回数であるカウント値を記憶するカウント値記憶部と、カウント値に基づいて、各部に確定した異常が発生する可能性の程度を段階的に判断して異常判断信号を出力する判断部とで構成する。
(もっと読む)
油圧パワーステアリング装置
【課題】操舵補助装置に供給される作動油の量を正確に制御することに貢献する油圧パワーステアリング装置を提供する。
【解決手段】油圧パワーステアリング装置1は、パワーシリンダー20と、パワーシリンダー20に供給される作動油の流れを制御するロータリーバルブ70(以下、「バルブ70」)と、バルブ70を駆動する電動モーター50と、電動ポンプ24とバルブ70とを接続するポンプ吐出油路92と、パワーシリンダー20とバルブ70とを接続する各供給油路93,94と、電動モーター50を制御する制御部30とを有する。油圧パワーステアリング装置1は、シャフト42の回転角度を検出する回転角センサ60を有し、バルブ70は、電動モーター50のシャフト42と一体的に回転する弁体と、各油路92〜94と接続される空間を内部に有するハウジングとを有し、制御部30は、電動モーター50の制御に回転角センサ60の出力を反映する。
(もっと読む)
車両の障害物回避装置
【課題】
減速による障害物回避と横移動による障害物回避とを適切に選択できる車両の障害物回避装置を提供すること。
【解決手段】
自車両前方の障害物を認識する障害物認識部11と、自車両が走行している左右両側の車線の車線境界線を認識する車線境界線認識部12と、認識された障害物と認識された車線境界線との間隔Wl,Wrを認識する間隔認識部14と、認識された間隔Wl,Wrが予め設定された自車両の幅Wv以下である方向への横方向への障害物回避を禁止し、間隔Wl,Wrが自車両の幅Wvより大きい方向への横方向への障害物回避を許可し、自車両が認識された車線境界線を跨いで走行しているときには横方向への障害物回避を許可し、横方向への障害物回避が禁止された場合には車両を減速させる回避方向選択部15と、を備えた。
(もっと読む)
電動パワーステアリング装置
【課題】インバータのFETの駆動を簡易な構成と制御で安定的に行い得るようにした電動パワーステアリング装置を提供する。
【解決手段】PWMの各相デューティ指令値に基づいて、FETブリッジで成るインバータ106によりモータ20を駆動制御し、操舵系をアシスト制御するようになっている電動パワーステアリング装置において、FETブリッジの上段FETを駆動するための昇圧電源電圧を生成するチャージポンプ回路130及びブートストラップ回路140を具備し、高い方の電圧を昇圧電源電圧とする。
(もっと読む)
車線逸脱防止制御装置
【課題】突発的な外乱が生じた場合であっても車線逸脱を防止できる車線逸脱防止制御装置を提供する。
【解決手段】自車両の走行車線からの逸脱を防止するように操舵機構に操舵力を付与する車線逸脱防止制御装置を、自車両の横速度を検出する横速度検出手段と、走行車線からの逸脱を防止する方向へ目標横位置と自車両の横位置との偏差に応じて該偏差が大きくなる程大きい変化量で増加する操舵力を設定する操舵力設定手段と、横速度の増加に応じて走行車線からの逸脱を防止する方向への操舵力を増加補正する操舵力補正手段と、操舵力補正手段によって補正された操舵力に基づいて操舵機構に操舵力を付与する操舵力制御手段とを備える構成とする。
(もっと読む)
車両の操舵支援装置及び操舵支援方法
【課題】操舵操作に対する運転者の意図の反映度合いが低下することを抑制可能な、車両の操舵支援装置及び操舵支援方法を提供する。
【解決手段】自車両が有する操舵輪の目標とする回転角度である目標操舵角を算出し、操舵輪の現在の回転角度である現在操舵角を検出し、目標操舵角と現在操舵角との差分である操舵角偏差を算出し、操舵角偏差を縮小させるための操舵支援トルクを算出し、自車両が走行する走行路上において、操舵輪の回転角度を目標操舵角とした状態で自車両が通過すると予測する目標経路上の点である目標点に自車両が到達した時点における、自車両の車幅方向右側及び車幅方向左側のうち少なくとも一方に存在する障害物と自車両との間の距離である余裕代を算出し、算出した余裕代が大きいほど小さい値に算出した操舵支援トルクを操舵輪へ出力する。
(もっと読む)
目的走行位置設定装置及び操舵制御システム
【課題】走行中の周囲の状況の変化に応じた好適な位置に目標走行位置を設定し、設定した目標走行位置で車両を走行させる。
【解決手段】操舵制御システム1のCPU16は、接近車両の有無に応じて目標走行位置を設定し、車両2が現在の走行位置から目標走行位置へ走行するために必要な操舵トルクを発生するようにモータ9を駆動する。目標走行位置は、左側の接近車両及び右側の接近車両がともに検出されない場合には、車線の幅方向の中央の標準位置に設定され、左側の接近車両のみが検出された場合には、標準位置よりも右側の右偏向位置に設定され、右側の接近車両のみが検出された場合には、標準位置よりも左側の左偏向位置に設定され、左側の接近車両及び右側の接近車両がともに検出された場合には、左側の接近車両と右側の接近車両との中間位置に設定される。
(もっと読む)
電動パワーステアリング装置
【課題】 自動停止条件の成立後に操舵トルクが増加する場合であっても、操舵トルクの急変を抑制可能な電動パワーステアリング装置を提供する。
【解決手段】 電動パワーステアリング装置10は、ステアリング系20の操舵トルクを検出する操舵トルクセンサ41と、ステアリング系20に補助トルクを与える電動モータ43と、操舵トルクに基づく目標電流値で電動モータ43のモータ電流値を制御するモータ電流制御部42と、を備える。モータ電流制御部42は、自動停止条件が成立するとエンジンを停止させるアイドリングストップ制御部100の自動停止条件が成立することに起因して、目標電流値を目標電流上限値以下に設定する。目標電流上限値は、目標電流値を目標電流上限値以下に設定することを開始した時Tsの目標電流値Imsと関連する。
(もっと読む)
制御装置およびフォークリフト
【課題】装置構成の大型化およびコスト増加を抑えつつ、意図しない旋回を防止できるようにする。
【解決手段】検出ヨーレートが想定ヨーレートの所定範囲外となるような場合に(s160)、検出ヨーレートの作用による本体2の旋回を相殺する方向へ駆動輪53を操舵させるべく操舵トルクを付与しているため(s180)、これにより検出ヨーレートが想定ヨーレートに近い値となる結果、意図しない旋回を防止することができる。このとき、検出ヨーレートを、実際のステアリング51の操作に応じたヨーレートである想定ヨーレートと所定範囲以内に近似させることにより、効果的に意図しない旋回が防止される。
(もっと読む)
電動パワーステアリング装置
【課題】電動モータのトルクが伝達されるラックが可変比ラックである電動パワーステアリング装置において、操舵状況に応じた適切な操舵補助を実現できる電動パワーステアリング装置を提供する。
【解決手段】q軸電流指示値生成部は、現在のラック軸位置におけるアシスト側ラックゲインGaを求める。次に、q軸電流指示値生成部は、操舵トルクとアシスト側ラックゲインGaがラックゲイン基準値Gaoである場合のq軸電流指示値(基準q軸電流指示値Iqo*)との関係を記憶したマップを用いて、操舵トルクTに応じた基準q軸電流指示値Iqo*を求める。次に、q軸電流指示値生成部は、基準q軸電流指示値Iqo*を、アシスト側ラックゲインGaに対応したq軸電流指示値Iq*に変換する。
(もっと読む)
車両制御装置
【課題】制御特性を走行路に適したものとするために周回路などの走行環境を容易に判定できる車両制御装置を提供する。
【解決手段】車両に対する入力とその入力に応じて車両が示す挙動との関係である制御特性を変更できる車両制御装置において、前記車両が走行して得られた走行軌跡を記憶する(ステップS3)とともに記憶されている走行軌跡に基づいて同一走行路を走行していることを判定し(ステップS4)、同一走行路を走行していることの判定が成立した場合には前記制御特性をその走行路に適する特性に設定する(ステップS5)ように構成されている。
(もっと読む)
電動パワーステアリング制御装置
【課題】車載装置からの指令に基づく制御と通常のパワーステアリング制御との両立を安価な手段で実現可能な電動パワーステアリング制御装置を得る。
【解決手段】メインマイコン503とメインマイコン監視回路511とを備える。メインマイコン503は、トルク信号TRQに基づきパワーステアリング指示電流ImtEPSを決定するパワーステアリング制御部503cと、自動駐車制御信号PASigに基づき自動駐車制御電流ImtPAを決定する自動駐車制御部503dと、モータ電流指示値Imt1を切替える切替信号生成処理部503eおよびモータ電流切替部503fと、監視特性を切替える監視回路モード選択部503jおよび監視回路特性切替部503mとを有する。メインマイコン監視回路511は、モータ電流検出信号Imdが制限値を超えた場合に異常状態と判定して制御を停止する。
(もっと読む)
電動パワーステアリング装置
【課題】二重制御系統を備えた電動パワーステアリング装置において、サブマイクロコンピュータの実装を必要としない電動パワーステアリング装置を提供する。
【解決手段】制御装置5A,5Bを2系統有し、各制御装置5A,5Bは、相手系統の故障を推定する故障推定部56,66を備え、故障推定部56,66は、電動モータ1a,1bの出力値が目標指令値に収束する時間Teを監視し、この収束時間Teが基準時間γよりも長い場合に、他系の制御装置の故障を推定するものであり、他系の制御装置の故障を推定した正常側の制御装置は、正常側の制御装置の制御周期T0を短くしかつ制御ゲインK0を上げる制御を行う。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】d軸電流指令値設定部31、d軸電流偏差演算部32、ロータ角度制御部33、ロータ角度演算部34および速度演算部35から構成されるロータ角度推定手段によって、ロータ角度θが推定される。q軸電流指令値設定部21は、トルクセンサ1によって検出される操舵トルクおよび車速センサ2によって検出される車速に応じたモータトルクをモータ5から発生させるためのq軸電流指令値Iq*を設定する。d軸電流指令値設定部24は、d軸電流指令値Id*を設定する。q軸電流指令値Iq*と、d軸電流指令値Id*と、q軸電流検出値Iqと、d軸電流検出値Idと、推定されたロータ角度θとに基づいて、モータ5に供給される電流が制御される。
(もっと読む)
電動機の制御装置
【課題】非干渉制御を行っても、振動をより低減させることができる電動機の制御装置を提供する。
【解決手段】本制御装置では、回転子角速度ω[rad/s]の振動周波数におけるゲインが小さくなるように、回転子角速度ω[rad/s]をゲイン調整後角速度ω’[rad/s]に変換するゲイン調整部105を備える。非干渉制御を行うために、非干渉d軸電圧指令値Vd[V]および非干渉q軸電圧指令値Vq[V]を求める非干渉制御部104を備える。非干渉制御部104は、ゲイン調整後角速度ω’[rad/s]、d軸PI出力電圧指令値Vd’[V]およびq軸PI出力電圧指令値Vq’[V]に基づいて求める。更に、非干渉d軸電圧指令値Vd[V]と非干渉q軸電圧指令値Vq[V]から変換された三相電圧指令値Vu、Vv、Vw[V]に基づいて、インバータ2を制御するPWM信号PWMを生成するPWM変換部109とを備える。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】電動モータの抵抗の推定精度が低下することを抑制することのできる電動パワーステアリング装置の制御装置を提供する。
【解決手段】電動パワーステアリング装置の電子制御装置30は、測定電流Imaおよび測定電圧Vmaを用いて第1抵抗値Raを算出する第1抵抗算出部61と、この第1抵抗算出部61とは異なる手段により第2抵抗値Rbを算出する第2抵抗算出部62とを有する。そして第2抵抗値Rbよりも小さい第1抵抗値Raを演算抵抗値として確定する。
(もっと読む)
車両用操舵装置
【課題】電動パワーステアリング装置の異常によるアシスト停止後もステアリング操作により車両の旋回を継続できる車両用操舵装置を提供する。
【解決手段】ABS装置30は、電動パワーステアリング装置1のECU11の制御状態量である操舵トルクτを取得する(ステップS401)。異常検出信号Spsfの入力があるか否かを判定し(ステップS402)、異常検出信号Spsfの入力がある場合(ステップS402:YES)には、続いてステアリング操作中であるか否かを判定する(ステップS403)。ステアリング操作中であると判定した場合(ステップS403:YES)には、受信した操舵トルクτに基づき、所定の転舵輪7に付与する制動力を演算する(ステップS404)。ここで、通常時の制動力に演算された制動力分が補正される。そして、その制動力を制御指令として出力(ステップS405)し、ブレーキアクチュエータ31を制御する。
(もっと読む)
操舵支援装置
【課題】車線の逸脱を防止するためにガイダンストルク指令値を増加補正することができ、しかもガイダンストルク指令値が不必要に増加補正されるのを抑制できる操舵支援装置を提供する。
【解決手段】ゲイン設定部51は、TLC演算部41によって演算された車線逸脱予想時間TLCに基づいて、ガイダンストルク指令値補正用のゲインGを演算する。車線逸脱予想時間TLCが所定値C未満の領域においては、ゲインGは、車線逸脱予想時間TLCの減少に応じて下限値(=1)から上限値Gmax(>1)まで単調に増加するように設定されている。ゲイン乗算部52は、ガイダンストルク指令値補正用のゲインGをガイダンストルク指令値TG*に乗じることにより、最終的なガイダンストルク指令値TG*’を求める。
(もっと読む)
21 - 40 / 1,811
[ Back to top ]