
Fターム[3D233CA35]の内容
パワーステアリング装置 (30,926) | 電気式パワーステアリング (28,865) | ステアバイワイヤ (702)
Fターム[3D233CA35]に分類される特許
21 - 40 / 702
規範応答演算装置およびそれを用いた車両用操舵装置
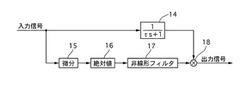
【課題】 規範応答のゲインおよび位相の特性を独立に設定できる規範応答演算装置およびそれを用いた車両用操舵装置を提供する。
【解決手段】 入力信号uに基づいて規範ヨー応答のベース値を演算する線形フィルタ14と、入力信号uの微分値du/dtを出力する微分器15と、入力信号uの微分値du/dtに基づいてゲインyを演算する非線形フィルタ17と、規範応答ベース値にゲインyを乗算して規範ヨー応答を演算する乗算器18と、を備える。
(もっと読む)
車両の操舵制御装置及び操舵制御方法

【課題】転舵モータの過熱時に操舵輪と転舵輪とを機械的に結合しても、運転者が負担する操舵トルクの増加を抑制することが可能な、車両の操舵制御装置及び操舵制御方法を提供する。
【解決手段】操舵輪32の操作に基づいて転舵輪24を転舵させる転舵モータ2の温度が、予め設定したクラッチ締結温度を超えているか否かを判定し、転舵モータ2の温度がクラッチ締結温度を超えていると判定すると、操舵輪32と転舵輪24との間のトルク伝達経路を機械的に分離する開放状態にあるクラッチ6を、トルク伝達経路を機械的に連結した締結状態に切り換えた後も、操舵輪32の操作に応じた目標転舵角を算出し、この算出した目標転舵角に応じて転舵トルクを制御する転舵モータ2の駆動制御を継続させる。
(もっと読む)
操舵反力生成装置、車両及び操舵反力生成方法
【課題】基準ラック軸力をより高精度に推定すること。
【解決手段】基準ラック軸力演算部15Bの車体持ち上げエネルギ演算部15aは、操舵角に基づき、転舵されることにより発生する車体1Aの上下方向の変位による車体持ち上げエネルギを算出し、タイヤ摩擦エネルギ演算部15bは、操舵角に基づき、転舵によってそれら転舵輪と走行路面との間に発生する摩擦によるねじりトルクを算出し、セルフアライニングエネルギ演算部15cは、操舵角及び車速に基づき、セルフアライニングトルクを算出し、加算部15dは、車体持ち上げエネルギ、ねじりトルク、セルフアライニングトルクを加算して総エネルギ量を求め、ラック軸力演算部15eは総エネルギ量とラックストローク量とに基づき基準ラック軸力を推定する。
(もっと読む)
冗長機能付きステアバイワイヤ式操舵装置の制御装置
【課題】 転舵用のメインモータの失陥および制御装置の故障に対する冗長性確保のための多重化と、平常時は多重化部分を利用した高機能化を両立したステアバイワイヤ式操舵装置の制御装置を提供する。
【解決手段】 メインモータを切り離しサブモータの回転を伝えて転舵可能なフェールセーフモードとする切替機構17を有する。第1の制御装置101は、反力アクチュエータ4とサブモータ7を制御する。第2の制御装置201は、メインモータ6を駆動する。第1の制御装置101は、異常時切替指令部106を有し、メインモータ6が失陥であるとの診断結果を受けたとき、および相互故障診断部103で第2の制御装置201が故障であると診断したときに、切替機構17をフェールセーフモードとする。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】 トー角制御用モータの小型化を図り消費電力の増加を抑え、また車両の停止時に、トー角を制御するとき運転者に違和感を与えないステアバイワイヤ式操舵装置を提供する。
【解決手段】 ステアリング制御手段8aは、車両の停車時に、トー角を変える指令信号を出力する場合にトー角を変える回転分割軸6B側の操舵輪3を、この操舵輪3が接地する地面に対して方向が変化しないように、トー角調整用モータ13と転舵用モータ11とを協調して制御する協調制御部8adを有する。
(もっと読む)
車両用操舵装置
【課題】ステアリングギア比を車速に応じて変化させる場合であっても、ドライバに対し、車速に関係なく適切な操舵量をイメージさせる。
【解決手段】車速Vに基づきステアリングギア比Gおよび転舵角δを算出し(ステップS1、S2)、さらに車速Vおよび操舵角θに応じた操舵反力成分T(V,θ)と、フリクション成分Tfと、操舵角速度θ′に応じた操舵反力成分T(θ′)との和から操舵反力Tを演算し(ステップS3〜S8)、操舵反力成分T(V,θ)を、車速Vが大きいときほど小さな値となる特性とする。車速Vが大きいときほど操舵反力Tは抑制されるため、ステアリングギア比を車速に応じてステアリングギア比が大きくなる特性とした場合でも、ステアリングホイール1に付与される操舵反力は車速に関係なくほぼ同等程度となる。そのためドライバは操舵量をイメージしやすくなり、的確な操舵を行うことができる。
(もっと読む)
車両用操舵装置
【課題】多回転操作される操舵部材の回転角を規制可能な小型の車両用操舵装置を提供。
【解決手段】回転規制機構21は、操舵軸9の出力軸24と同軸的に一体回転可能な回転可能要素(ロータコア63の第2部分66)と、回転不能要素(ハウジングの端壁32)との間に、出力軸24によって同軸的に支持され出力軸24に対して回転可能で且つ軸方向X1に移動可能な複数の板要素71〜75を備える。隣接する要素間の相対回転量を突起81と係合溝82,83の両端の規制部とによって規制する。出力軸24の中心軸線L1に対する板要素71〜75の中心軸線の傾きを抑制するように、板要素71〜75の軸方向X1の移動量を所定量以下に規制する軸方向移動規制要素701を設けた。
(もっと読む)
車両用操舵装置
【課題】運転者に操舵部材の回転端の接近を気付かせる車両用操舵装置の提供。
【解決手段】操舵部材の回転量を所定角度以内に規制する回転規制機構21を備える。連結要素80が、回転不能要素(ハウジング11と一体の回転不能要素F及びハウジング11によって回転規制された押圧板70)、回転可能要素66及び中間要素(中間板71〜75)のうちの隣接要素間の相対回転量を規制する。隣接要素間に介在する摩擦抵抗付与要素として、高摩擦板96と低摩擦板91〜95を含む。低摩擦板91〜95に対応する隣接要素(回転可能要素66、中間板71〜74)の相対回転が終了した後、高摩擦板96に対応する隣接要素(中間板75及び押圧板70)が相対回転する。
(もっと読む)
車両用操舵装置及び荷役車両
【課題】操舵角が大きな範囲は、転舵速度に基づく操舵制御を実行することにより運転者の操舵負担を減らす。
【解決手段】タイヤを転舵させる転舵駆動機構と、操舵部材の操舵角を検出する操舵角センサと、操舵角が所定の切替角αを越える高角領域にあるか否かを判定し、操舵角が高角領域にあるとき操舵角センサで検出した操舵角の増減を判定する切り込み/切り戻し判定処理部(B3)と、操舵角が高角領域で増加傾向にあるとき、操舵角が高角領域にある時間に応じてタイヤの転舵角が増大するように転舵駆動機構を制御し、操舵角が高角領域で減少傾向にあるとき、操舵角が高角領域にある時間に応じてタイヤの転舵角が減少するように転舵駆動機構を制御するための目標転舵角を算出する目標転舵角算出処理部(B4)とを備える。
(もっと読む)
車両用操舵装置及び荷役車両
【課題】不必要な据え切り操作を極力させないように、意図的な据え切り以外の動作を抑制することにより、車両において無駄な電力消費を抑制する。
【解決手段】操舵部材と、車速を検出する車速検出部と、検出された車速が規定値よりも小さいかどうかを判定する車速判定部と、操舵部材に操舵反力を付与する反力モータと、転舵輪を転舵させる転舵駆動機構と、転舵駆動機構を駆動する転舵モータとを備える。車速判定部によって、検出された車速が規定値よりも小さいと判定された場合に、操舵部材の操舵角の増加に伴って転舵モータの通電を制限するとともに、操舵反力が急激に増大するように反力モータを制御する。
(もっと読む)
車両用操舵装置、操舵力推定装置、操舵制御方法および操舵力推定方法
【課題】車両用操舵装置において、操舵トルクあるいはラック軸力をより高精度に推定できるようにする。
【解決手段】車速を検出する車速検出手段14と、ステアリング軸3に入力した操舵操作における操舵角を検出する操舵角検出手段4と、ステアリング軸3に入力した操舵操作に対し、操舵補助力の付与あるいは操向輪9FR、9FLの操舵角制御を行う電動モータ5と、ステアリング軸3の回転を操向輪に伝達するステアリングラック部材7と、操向輪9FR、9FLの操舵において発生する路面と操向輪9FR、9FLとの摩擦エネルギを算出する摩擦エネルギ算出手段と、摩擦エネルギと操舵角とに基づいて操舵トルクあるいはステアリングラック部材7のラック軸力を推定する操舵力推定手段と、操舵力推定手段が推定した操舵トルクあるいはラック軸力に応じて、電動モータ5の駆動制御を行うモータ制御手段とを備える車両用操舵装置とした。
(もっと読む)
車両用操舵装置および操舵制御方法
【課題】ステアバイワイヤシステムにおいて付与する操舵反力をより適切なものとすること。
【解決手段】操向輪9FR、9FLの操舵において発生する路面と操向輪9FR、9FLとの摩擦エネルギを算出する摩擦エネルギ算出手段と、摩擦エネルギと操舵角とに基づいて操舵トルクあるいはステアリングラック部材7のラック軸力を推定する操舵力推定手段と、操舵力推定手段が推定した操舵トルクあるいはラック軸力に応じて、ステアバイワイヤシステムにおける操舵反力用モータ5aの駆動制御を行う操舵反力用モータ制御手段とを有する車両用操舵装置とした。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】トー角調整時に転舵軸の非回転分割軸と回転分割軸とが互いに抜けることが防げ、トー角調整用モータの消費電力量を抑えることができるステアバイワイヤ式操舵装置を提供する。
【解決手段】非回転分割軸10Aと回転分割軸10Bとがねじ結合部で互いに結合された転舵軸10を備える。両分割軸10A,10Bを一体に軸方向移動させることにより、転舵輪を転舵させる。非回転分割軸10Aに対して回転分割軸10Bを回転させて、ねじ結合部の螺合長さを調整することにより、転舵輪のトー角を変える。一方の分割軸10Aに、径方向に広がるつば部90b,90cを有する被係合部材90を設ける。他方の分割軸10Bに、ねじ結合部の螺合長さが一定長さ以下になった場合に、つば部90cに係合して螺合長さが短くなる側への両分割軸10A,10Bの相対軸方向移動を規制する係合部材91を設ける。
(もっと読む)
ステアリング制御装置
【課題】車両の挙動に応じた的確な操舵反力トルクを付与するとともに、運転者が中立位置を超える急速なステアリング操作を行った場合であっても、ステアリングの操作性を良好に維持することが可能なステアリング制御装置を提供する。
【解決手段】コントローラ13のCPU15は、記憶部14から最新の操舵角と第1操舵反力トルクと第2操舵反力トルクとを読み出し、操舵角の符号と第1操舵反力トルクとの符号とが異なり、第1操舵反力トルクの絶対値が第2操舵反力トルクの絶対値よりも小さい場合には、モータ7に第1操舵反力トルクを発生させ、操舵角の符号と第1操舵反力トルクとの符号とが異なり、第1操舵反力の絶対値が第2操舵反力の絶対値以上の場合には、モータ7に第2操舵反力トルクを発生させ、操舵角の符号と第1操舵反力トルクの符号とが同じ場合には、モータ7にトルクを発生させない。
(もっと読む)
ステアリング制御装置
【課題】車両の発進直後のステアリング操作性を向上させる。
【解決手段】ステアリング制御装置1は、車両2の直進に対応する中立位置を含む範囲で回転操作されるステアリングホイール5に対してトルクを付与するモータ10と、ステアリングホイール5の回転操作に応じて変動する車両2の操舵角を検出する操舵角センサ11と、車両2が発進直後であるか否かを判定する発進判定部22と、車両2が発進直後であると発進判定部22が判定したとき、操舵角センサ11が検出した操舵角に基づいて、中立位置へ向かって作用する中立方向トルクのトルク量を決定し、決定したトルク量の中立方向トルクをモータ10に発生させるトルク制御部22と、を備える。
(もっと読む)
車両用操舵装置およびその制御方法
【課題】ステアバイワイヤシステムを有する車両用操舵装置において、旋回制動時等の走行安定性を向上させること。
【解決手段】ステアバイワイヤシステムと、ステアリングラック部材14と車輪とを連結する転舵用リンク部材と、転舵用リンク部材と並行して設置し、車体と車輪とを車両上下方向に揺動可能に連結する懸架用リンク部材と、ステアリングラック部材14を車両前後方向に移動させるラック移動手段27a、27b、27cと、ラック移動手段27a、27b、27cによるステアリングラックの移動に応じて、入力側ステアリング軸と出力側ステアリング軸との連結状態を切り替えるクラッチ27dと、を有し、ラック移動手段27a、27b、27cが、ステアリングラック部材14を、転舵用リンク部材との連結点が懸架用リンク部材に近づく方向に移動させる車両用操舵装置とした。
(もっと読む)
車両用操舵装置および車両用操舵装置の製造方法
【課題】ハウジング内で転舵軸の移動量を規制することができ、しかも小型で強度に優れた車両用操舵装置を提供する。
【解決手段】電動モータ21,22の回転動力をボールねじ機構23を介して転舵軸6の軸方向X1の移動に変換する、ステアバイワイヤ式の車両用操舵装置1である。転舵軸6の移動方向に応じて、転舵軸6の中間部のねじ軸32の両端の当接部45,46が、ロータ26内を挿通して、対応するストッパ47,48に当接することにより、転舵軸6の移動量を規制する。ストッパ47,48をハウジングとは別部材の強度の強い材料で構成する。
(もっと読む)
車両用操舵装置
【課題】操舵用の電動モータのフェール時にも、転舵輪の向きを容易に変位することのできる車両用操舵装置を提供する。
【解決手段】電動モータ21,22のロータ31,41によって駆動されるボールナット48と、転舵軸6に設けられボールナット48にねじ結合されたねじ軸47とを含むボールねじ機構23が設けられている。転舵軸6の回転は、第1規制機構60によって規制されている。ねじ部材58は、ブッシュ26から取り外すことが可能である。ねじ部材58は、ハウジング5の第2雌ねじ部63およびロータ31の第2挿通孔64を挿通することにより、ロータ31,41の回転を規制する。このとき、ブッシュ26を回転させることにより、転舵軸6は、ボールナット48に対して回転しながら、軸方向X1に変位し、転舵輪の向きが変わる。
(もっと読む)
車両用駆動操舵アクチュエータ
【課題】1つの電動モータにより駆動力と操舵力を自在に制御することができ、しかも、電力消費が少ない車両用駆動操舵アクチュエータを提供する。
【解決手段】車輪駆動ユニット200は、電動モータ11の回転を減速して車輪12へ伝達する第1の遊星ギヤ機構13を備え、操舵機構210は、操舵に応じて作動され、電動モータの回転を増減速する無段変速機15と、電動モータの回転動力が直接入力される第1入力部、電動モータの回転動力が無段変速機を介して入力される第2入力部および操舵ユニットを操舵する操舵部材に連結された出力部を有する第2の遊星ギヤ機構17とを備えている。
(もっと読む)
ステアバイワイヤシステム
【課題】ステアバイワイヤシステムにおいて、ステアリングホイールの手応え感を最適に調整することにある。
【解決手段】反力発生モータ制御手段24は、異常検出手段24Bを備えるとともに、ステアリングホイール7の操作角を検出する操作角検出手段10,12に連絡し、異常検出手段24Bにより反力発生が停止する異常状態が検出されている時には操作角検出手段10,12により検出されるステアリングホイール操作角に基づいて反力発生モータ13の端子13A,13B間を断続的に短絡させる。
(もっと読む)
21 - 40 / 702
[ Back to top ]