
Fターム[5C122HA88]の内容
Fターム[5C122HA88]に分類される特許
41 - 60 / 5,258
画像合成装置、及びプログラム
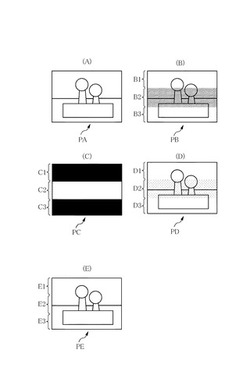
【課題】予期せず明るさにムラのある画像を取得しても合成画像にその影響が出ないようにする。
【解決手段】図3(C)に示す、予期せぬストロボフラッシュにより部分的に明るくされた連写画像PCの領域C2に関しては加算合成に採用せず、領域C1、C3は加算合成に採用して、連写された複数枚の画像をノイズ低減し加算合成する。これにより、連写された複数枚の画像において連写画像PCの領域C2は採用されていない「(3)ノイズ低減処理後の合成画像のYUV画像データ」が生成されることとなる。そして、生成した「(3)ノイズ低減処理後の合成画像のYUV画像データ」を用いて、動体判定マップMをαマップとして、
(2)ノイズ低減処理後の基準画像のYUV画像データ
(3)ノイズ低減処理後の合成画像のYUV画像データ
を合成する。これにより、図3(E)に示す領域E1,E2,E3が同一の明るさであり、明るさにムラのない合成画像PEを得ることができる。
(もっと読む)
画像合成装置、及びプログラム

【課題】撮像画像に基づいて、過度に色空間の各パラメータを調整し、かつ、現実感を失わせないような画像を生成すること。
【解決手段】画像合成装置1は、情報取得部53と、画像調整部54と、合成部56と、を備える。情報取得部53は、露光時間を変えて順次撮像された複数の画像データのうちの一の画像データにおける、特定の色を有する画素領域の明るさに関する数値を取得する。画像調整部54は、情報取得部53によって取得された数値を調整する。合成部56は、この画像調整部54によって調整された数値で一の画像データの特定の色を有する画素領域の明るさを調整し、この調整された一の画像データに、複数の画像データのうちの他の画像データを合成し、ダイナミックレンジを拡大させた合成画像データを生成する。
(もっと読む)
焦点調節装置および撮像装置
【課題】光学系の焦点状態を適切に検出することができる焦点調節装置を提供する。
【解決手段】焦点調節レンズ32を光軸方向に駆動させながら、光学系による像のコントラストに関する評価値を算出することで、光学系の焦点状態を検出する焦点検出部21と、焦点調節レンズ32のレンズ位置に対応する複数の開放絞り値のうち、最小の開放絞り値を、最小開放絞り値として取得する第1取得部21と、現在の絞り段数を取得する第2取得部21と、最小開放絞り値と現在の絞り段数とに基づいて、現在の絞り段数における最小の絞り値を、最小絞り値として算出する演算部21と、焦点調節レンズ32を駆動させながら、焦点検出部21に焦点検出を行わせる制御部21と、を備え、制御部21は、最小絞り値に基づいて、焦点調節レンズを駆動させながら、焦点検出部に光学系の焦点状態の検出を行わせる際における、焦点調節レンズ32の駆動速度を決定する。
(もっと読む)
撮像装置
【課題】 速写性を重視したうえで、連写等の駆動モードでの挙動が駒毎に変化する場合でも、各々の駒での画質劣化を抑え、好適な画像を得る。
【解決手段】 同一モード内で連続的に撮像動作を行う場合で、所定駒前後で、使用するシェーディング補正等の補正データを変更する。
(もっと読む)
画像処理装置及び画像処理方法
【課題】シェーディング補正を行う場合に高輝度部分が飽和してディテールが失われることを抑制する。
【解決手段】撮像素子によって撮像された画像を入力する入力部100と、入力部から入力された画像にかけるシェーディング補正量を画素ごとに算出するシェーディング補正量算出部101と、撮像素子の画素の画素値およびシェーディング補正量に応じてγ補正ゲインを算出するγ補正ゲイン算出部103と、γ補正ゲインに基づいて画素値にゲイン補正を掛けるゲイン補正部104とを有し、シェーディング補正とγ補正とを同時に行う。
(もっと読む)
撮像装置、撮像装置の制御方法、およびプログラム
【課題】一部の画素に急激な変化が生じた場合でかつ、その他の周辺画素にばらつきが無いであっても、補正処理を行うにあたって画像の劣化を少なくなるようにした撮像装置、撮像装置の制御方法、およびプログラムを提供する。
【解決手段】撮像素子から出力された画素データのうち、位相検出画素の近傍に位置する画素から、撮像された画像のコントラスト情報を検出し(S23〜S31)、コントラスト情報に基づいて、位相検出画素のデータを補正するか否かを判断し、補正すると判断した場合は、位相検出画素の周辺画素に対する重み付けを決定する(S33〜S35)。
(もっと読む)
撮像装置、情報処理装置およびプログラム
【課題】予め決められた期間にわたって撮像手段が撮像した場合の暗電流の値を用いて、指定された期間にわたって撮像手段が撮像した場合の信号からそのときの暗電流の成分を除去する。
【解決手段】撮像装置9は、複数の撮像素子が直線状に並べられた読取部1と、指定部20、制御部21、記憶部22を備えたコントローラと、照射部3とを有する。記憶部22は、第1期間、および第1期間よりも長い第2期間のそれぞれにわたって被撮像体に向けて光を照射せずに撮像素子に撮像させて得た第1信号と第2信号とを記憶する。制御部21は、指定部20で指定された第3期間にわたって光を照射せずに撮像素子に撮影させた場合に得られる値を、第1信号および第2信号を用いる線形補間により推算するとともに、第3期間にわたって光を照射し、撮像素子に撮像させて第3信号を取得する。そして制御部21は、取得した第3信号から推算した値を減算する。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】360度のパノラマ画像を生成する場合に、高品質なパノラマ画像が得られるようにする。
【解決手段】投影画像生成部は、カメラを360度回転させながら撮影された撮影画像を円筒面上にマッピングすることで、投影画像を生成する。差分累積値算出部は、隣接する投影画像間の各位置における差分累積値を算出し、有向グラフ生成部は、投影画像と差分累積値とに基づいて、差分累積値がエッジのエネルギに反映された有向グラフを生成する。経路探索部は、有向グラフに基づいて、各投影画像を接続してパノラマ画像を生成するときに最も破綻が少ない投影画像の接続位置を検索し、パノラマ画像生成部は、その検索結果に基づいて投影画像を接続し、パノラマ画像を生成する。本技術は、画像処理装置に適用することができる。
(もっと読む)
合焦制御装置、内視鏡システム及び合焦制御方法
【課題】 1群駆動レンズでAFを行う場合に、AF評価値取得時に発生する倍率変動による悪影響を抑止する合焦制御装置、内視鏡システム及び合焦制御方法等を提供すること。
【解決手段】 合焦制御装置は、撮像倍率の変更に伴い合焦物体位置が変更される撮像光学系の駆動を制御する合焦制御部330と、撮像光学系を介した撮像によって、異なる撮像倍率で撮像された複数の画像を取得する画像取得部310と、撮像倍率及び画像における被写体のサイズの少なくとも一方の変動である倍率変動を検出する倍率変動検出部320とを含み、合焦制御部330は画像及び倍率変動に基づいて算出した、撮像光学系の焦点状態を表すAF評価値に基づいて撮像光学系を駆動することによって、撮像光学系の合焦制御を行う。
(もっと読む)
画像合成装置、画像合成方法、画像合成プログラム及び記録媒体
【課題】被写体が移動した場合であっても適切な合成画像を生成することができる画像合成装置、画像合成方法及び画像合成プログラム並びに当該画像合成プログラムを格納した記録媒体を提供する。
【解決手段】露出条件の異なる第1画像及び第2画像を用いて合成画像を生成する装置である。この装置は、画像入力部10、尤度算出部13、露出推定部14及び合成部16を備える。画像入力部10は、第1画像及び第2画像を入力する。尤度算出部13は、第1画像及び第2画像の差分に基づいて、各画素における動被写体尤度を算出する。露出推定部14は、動被写体尤度に基づいて第1画像と第2画像との露出条件を合わせる露出変換関数を推定する。合成部16は、露出変換関数を用いて第1画像及び第2画像を合成する。
(もっと読む)
画像処理方法および画像処理プログラム
【課題】複数の視差を生じさせる画像を取得するには、その数に応じた複雑な撮影光学系を用意しなければならなかった。
【解決手段】二次元的に配された複数の光電変換素子に対して、複数の視差に対応した複数種類の開口マスクを一対一に対応させて設けた撮像素子により撮像された複数の第1視差画像を取得する第1視差画像取得段階と、複数の光電変換素子全体に対して設けられた絞りにより、第1視差画像取得段よりも入射光の光軸に対する周縁の光束を遮光して、撮像素子により撮像された複数の第2視差画像を取得する第2視差画像取得段階と、複数の視差のそれぞれについて、第1視差画像と第2視差画像と、の差分に基づいて、複数種類の開口マスクに対応した複数の視差とは異なる新たな視差に対応した第3視差画像を生成する視差画像生成段階とを備える画像処理方法が提供される。
(もっと読む)
撮像装置及び撮像方法
【課題】簡易な装置で被写体の移動速度を測定することができる撮像装置及び撮像方法を提供すること。
【解決手段】第1の被写体までの距離を、該第1の被写体の大きさに基づいて算出する測距手段と、移動している第2の被写体を所定の時間間隔で連続撮影して複数の静止画像を生成する静止画像生成手段と、前記複数の静止画像のそれぞれから、前記第2の被写体の当該静止画像内における位置を検出する位置検出手段と、前記第1の被写体までの距離、前記複数の静止画像のそれぞれで検出された前記第2の被写体の位置の差、及び前記所定の時間間隔に基づいて、前記第2の被写体の移動速度を算出する算出手段と、を備えることを特徴とする。
(もっと読む)
情報出力装置、検知装置、プログラム及び情報出力方法
【課題】種々の誤検知発生要因に対応することが可能な情報出力装置、検知装置、プログラム及び情報出力方法を提供する。
【解決手段】被写体を撮影した画像に関する情報を出力する情報出力装置であって、前記画像を1又は複数の画像エリアに分割する分割手段と、撮影時間の異なる複数の前記画像から当該画像間の差分となる特徴量を前記画像エリア毎に算出する特徴量算出手段と、前記特徴量算出手段で算出された各画像エリアの特徴量に基づいて、前記特徴量に変化のある画像エリアを検知する画像エリア検知手段と、前記画像を構成する各画像エリアから、前記被写体のおかれる環境に応じて定まる条件に該当する画像エリアを特定する特定手段と、前記検知手段が検知した画像エリアから前記特定手段にて特定された画像エリアを除いた画像エリアに関する情報を出力する出力手段と、を備える。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】ワークを搬送する経路上の状態把握を支援するための情報を出力する。
【解決手段】画像処理装置は、連続する撮像の前後で撮像範囲に重複領域を有する撮像部110に接続される画像処理装置であって、撮像部110によって得られる複数枚の撮像画像を受け付けるインターフェイスと、撮像画像に対する計測処理を行うことにより、当該撮像画像中の被写体の計測結果を取得する計測手段と、複数枚の撮像画像を、前記重複領域に対応する重なり範囲で撮像順に重なり合うように合成し、且つ前記重なり範囲における前記被写体の計測結果を当該重なり範囲において重畳させた合成画像を生成する合成手段と、合成画像と、当該合成画像に関連付けて重なり範囲を示す情報とを出力する出力手段と、を備える。
(もっと読む)
機械式駐車場の車両はみ出し検出装置および方法
【課題】機械式駐車場の乗降室内で撮像された画像から車両の輪郭を正確に抽出することで、パレットに対する高精度のはみ出し検出を可能にする。
【解決手段】差分画像取得部62は、所定の間隔で撮像された二枚のフレームからフレーム間差分画像を計算する。初期輪郭設定部68は、車両の入庫開始からパレット上での停止までの間に差分画像取得部62によって計算されたフレーム間差分画像の論理和を計算し、論理和の画像の外周形状を初期輪郭とする。輪郭抽出部72は、初期輪郭をエネルギー最小化原理にしたがって内側に収束させていくことで初期輪郭に内包される物体の輪郭を抽出する動的輪郭モデルを実行して、フレーム内の車両の輪郭を抽出する。比較判定部74は、抽出された車両の輪郭と、パレット上の車両停止範囲を表すものとして予め設定されている基準枠とを比較し、車両の輪郭が基準枠内にあるか否かによって車両のはみ出しの有無を判定する。
(もっと読む)
撮像装置
【課題】電源オン時に、ユーザの意図する、電源オフ時の光学状態(フォーカス状態、ズーム状態)を保持した状態に設定する撮像装置を提供する。
【解決手段】撮像装置は、ズームレンズと、フォーカスレンズと、フォーカスレンズを駆動するフォーカス駆動部と、ズームレンズの位置を検出するズーム位置検出部と、フォーカスレンズの位置を検出するフォーカス位置検出部と、ズームレンズの位置およびフォーカスレンズの位置を記憶する記憶部と、撮像装置の動作を制御する制御部とを備える。制御部は、撮像装置の電源オフ時に、ズーム位置検出部が検出したズームレンズの位置およびフォーカス位置検出部が検出したフォーカスレンズの位置を記憶部に記憶させ、電源オン時に、検出したズームレンズの現在位置と、記憶部に記憶されているズームレンズの位置を比較し、両者が等しいときは、フォーカスレンズを初期位置に移動させないようにフォーカス駆動部を制御する。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム
【課題】マスク処理が必要な被写体がフレームインしてくる場合など、マスク対象かどうかの判定までに時間を要するような場合であってもマスク対象が映っている領域にマスクを掛けることができる画像処理装置を提供する。
【解決手段】マスク候補切出部222は、復号化された画像フレームのなかからマスク対象になり得る領域をマスク候補領域として切り出す。類似判定部234は、最新の前記マスク候補領域がマスク対象に類似している場合にはそのマスク候補をマスク対象として確定させる。マスク補充部260は、まず、前記類似判定部234による判定よってマスク対象に確定した領域の動きを時間的に後ろに追跡して移動軌跡を得る。続いてこの移動軌跡を時間的に前に外挿し、マスク対象が検出される前の動きを推定する。そして、この外挿で得られた領域に掛かる補充マスクを作成する。
(もっと読む)
距離測定装置、撮像装置、距離測定方法
【課題】撮像素子から得られた画像に基づいて、より信頼性の高い距離情報を取得することができる距離測定装置等を提供する。
【解決手段】撮像光学系9と、撮像光学系9の瞳領域を通過する3つ以上の帯域の光の光量の重心位置を異ならせる帯域制限フィルタ12と、カラーの撮像素子22と、撮像素子22から得られた複数帯域の色画像に基づき被写体までの距離を演算する位相差AF部42と、色画像が位相差演算に適しているか否かを判定する位相差適合判定部41と、位相差適合判定部41により位相差演算に適していると判定された適合色画像の数が3つ以上である場合に、位相差AF部42に、選択した2つの適合色画像の組み合わせの相関値、または2つの適合色画像の全ての組み合わせの相関値に基づき、被写体までの距離を演算させるAF制御部38と、を備えた距離測定装置。
(もっと読む)
撮像装置および撮像方法
【課題】データ容量が大幅に増大することなく書籍画像の湾曲歪を補正し歪の少ない画像が取得でき、且つ、ポータビリティに優れ、小型で低コストである撮像装置および撮像方法を提供すること。
【解決手段】撮像素子11と、該撮像素子11に被写体の像を結像させる撮影レンズ系2と、前記撮像素子11の信号から画像データを生成する画像生成手段12と、前記画像データを記録する記録手段と、前記被写体の距離を二次元方向で多点測距し測距データを取得する測距手段3と、前記被写体として書籍を撮影する書籍撮影モードが設定可能な撮影モード選択手段と、前記書籍撮影モードが選択されて得られた画像データを、前記測距手段3により取得した測距データに基づいて湾曲歪を補正する制御手段14と、を備えることを特徴とする。
(もっと読む)
カメラ姿勢算出装置
【課題】複数台の監視カメラの監視空間が什器等が設置された建物内、或いは建物内の廊下などの場合、各カメラの姿勢を校正する基準物体を設置するスペースを確保できない。
【解決手段】自己及び相互の鉛直下を撮像可能に設置された2台のカメラ2a,2bのそれぞれの鉛直下にマーカー7a,7bを配置する。視線方向算出部30は、例えば、カメラ2aについて当該カメラで撮像した画像における自己マーカー7a及び他方カメラ鉛直下の相手マーカー7bの位置座標を用いて当該カメラから各マーカーへの視線方向を算出する。姿勢算出部31は、自己マーカーへの視線方向から得られる鉛直方向と、相手マーカーへの視線方向から得られるカメラ2a,2b間の方位とを用いて世界座標系における各カメラの姿勢を算出する。
(もっと読む)
41 - 60 / 5,258
[ Back to top ]