
Fターム[3C007CX01]の内容
マニピュレータ、ロボット (46,145) | 関節 (545) | 関節部に駆動源を有するもの (234)
Fターム[3C007CX01]に分類される特許
21 - 40 / 234
装着型動作支援装置
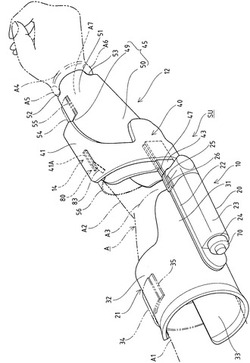
【課題】動作時に身体の装着部に対するずれ動きを最小限に抑えるようにする。
【解決手段】装着型動作支援装置SUは、肘関節A3を挟む上腕部A1に装着される第1サポート部材10と、前腕部A2に装着されると共に第1サポート部材10に連結され、肘関節A3の屈曲動作に合わせて姿勢変位可能な第2サポート部材12とを備える。第2サポート部材12は、前腕部A2に装着される前腕装着部45を備え、この前腕装着部45は、前腕部A2の最も細い部位である関節骨格部位A7に保持される保持部51を備える。また前腕装着部45は、肘関節A3から手首関節A4に近づくにつれて捻れた形状に形成され、前腕部A2を包み込むように装着される。前腕装着部45の前腕部A2に臨む内側面にノンスリップ加工が施されており、前腕部A2に対して前腕装着部45が滑り難くなっている。
(もっと読む)
ロボットの回転規制装置

【課題】ワイヤによってリンクの回転動作範囲を規制するロボットの回転規制装置において、ワイヤをロボットの内部に収納でき、また、リンクの回転動作範囲をリンク毎に所望の角度に設定することができるようにする。
【解決手段】ワイヤ27の両端部を、一のリンクのフレーム9と、当該フレーム9の内側に位置され他のリンクが連結される回転軸13とに連結し、他のリンクの回転に伴ってワイヤ27が回転軸13に巻き取られて伸び切ることにより他のリンクの回転動作範囲を規制する。
(もっと読む)
ロボット制御装置およびロボット制御方法
【課題】角度センサに異常が生じた場合において、サーボモータと減速機との接続部分への負担を抑制しつつ、ダイナミックブレーキと機械ブレーキとを用いて速やかにサーボモータを停止させる。
【解決手段】ロボット制御装置200は、角度センサ160の異常が検出された場合において、推定された回転速度においてダイナミックブレーキを作動させたと仮定した場合に該ダイナミックブレーキによって生じる制動トルクと、機械ブレーキ150を作動させたと仮定した場合に該機械ブレーキ150によって生じる制動トルクとのトルク合計値が、所定のトルク上限値を超える場合に、機械ブレーキを作動させずにダイナミックブレーキを作動させる第1の制動処理を実行し、トルク合計値が前記トルク上限値以下の場合には、ダイナミックブレーキおよび機械ブレーキを作動させる第2の制動処理を実行する。
(もっと読む)
産業機器の回転関節制御装置
【課題】減速機を使用して回転負荷にトルクを供給するトルク制御において、駆動状態あるいは制動状態といったトルクの供給状態を検知する。
【解決手段】本発明は、回転負荷83に対して回転動力を供給する回転関節装置が発生させるトルクを制御する回転関節制御装置71を提供する。回転関節装置は、駆動トルクを発生する駆動トルク発生部51と、所定の回転比で変速された回転数の回転動力を所定の効率で出力する出力軸を有する変速装置30と、出力側トルクを伝達するトルク伝達構造とを有する。回転関節制御装置71は、変速装置30が出力軸に回転動力を出力している伝達状態である駆動状態と、変速装置30が入力軸に回転動力を出力している伝達状態である制動状態とを判定する伝達状態判定部71aを備える。伝達状態判定部71は、駆動トルクと回転比の積である無損失トルクと、出力側トルクとの比較に基づいて駆動状態と制動状態と判別する。
(もっと読む)
ロボット装置、ロボット装置の制御方法およびプログラム
【課題】従来のロボット装置の制御方法にあっては、制御装置における演算量が多くなり処理に時間が掛かったり、処理速度を上げるために制御装置のコストが増加したりする問題があった。
【解決手段】アクチュエーターの角度センサーの回転角度検出データより、前記角度センサーを備える前記アクチュエーターによって動作する前記アームの角速度を演算する第1演算部と、前記第1演算部の演算対象の前記アクチュエーターを含む連結装置を介して連結される前記アームに備える慣性センサーの角速度検出データより、前記連結装置を軸とする前記アームの角速度を演算する第2演算部と、低周波成分を除去した、前記アクチュエーターと前記アームとの間のねじれ角速度を演算する第3演算部とを備えるロボット装置。
(もっと読む)
多関節ロボット
【課題】アクチュエータ間の配線の絡みを防止することで電気配線の設置の好適化を図り、その上でしかも多関節ロボットの小型化を実現する。
【解決手段】関節アクチュエータ10は、モータモジュール11と、このモータモジュール11に組み付けられる配線ユニット13とを備えている。モータモジュール11の軸方向両端にはそれぞれトップカバー12とエンドカバー14とが設けられており、これらトップカバー12とエンドカバー14とに配線ユニット13のコネクタ83,84がそれぞれ取り付けられている。配線ユニット13のFPCケーブル82はモータハウジング27の外周に周回させて設けられている。また、配線ユニット13はモータハウジング27を回転軸として回転する筒体73を備えており、筒体73にFPCケーブル82が固定されている。
(もっと読む)
駆動源ユニット、及びロボット
【課題】ブレーキとモーターとを配置するために必要な体積を抑制して、モーター及びブレーキを収容するために必要なアームの大きさが増大することを抑制することができる駆動源ユニット、及びロボットを提供する。
【解決手段】中心軸まわりに回動する出力軸を備える駆動源と、出力軸に係合しており、出力軸と略一体に、中心軸まわりに回動する出力部材と、出力軸の軸方向において駆動源と並べて配設されており、出力軸の回動を制動することが可能な制動手段と、を備え、出力部材と制動手段とは、出力軸の軸方向において、少なくとも一部分が、同じ位置に配設されている。
(もっと読む)
ロボット装置およびロボット装置の制御方法
【課題】実作動時において基準となるセンサー検出データと比較し、その検出データの差分から確実な故障判断を行うロボット装置および制御方法を提供する。
【解決手段】アクチュエーターを含む連結装置によりアームが回転もしくは直線移動可能に連結されたロボット装置であって、アームに取り付けられた慣性センサーと、アクチュエーターに備える角度センサーからの回転角度データから、アクチュエーターの角速度および角加速度を演算する第1演算部と、慣性センサーにより検出された出力より、アームの角速度または角加速度を演算する第2演算部と、第1演算部により演算された角速度または角加速度と、第2演算部により演算された角速度または角加速度とを比較する比較部と、比較部においてアクチュエーターとアームの角速度または角加速度との差の絶対値が、閾値より大きい場合に慣性センサーが故障と判定する。
(もっと読む)
駆動装置
【課題】変形可能な変形機械要素を介して動力が伝達される装置における、変形機械要素の変形量を高精度に取得する。
【解決手段】回転子20と結合された第1アーム1と、固定子10と結合された第2アーム2と、固定子10と第2アーム2の間に設けられた弾性部材30と、回転子20に設けられたエンコーダ板Eと、固定子10に設けられ、エンコーダ板Eの符号を検出する第1フォトセンサS1と、第2アーム2に設けられたエンコーダ板Eの符号を検出する第2フォトセンサS2とを備えて、駆動装置を構成する。
(もっと読む)
ロボットのリンク装置
【課題】ロボットの歩行脚またはアームとして機能するロボットのリンク装置において、関節にガタなどを設けても、高精度に、第1のリンクに対する第2のリンクの回転角を制御できるようにする。
【解決手段】歩行脚またはアームを構成する第1および第2のリンク3、5と、リンク3、5を連結する関節7とを備える。関節は、第1および第2の関節部7a、7bを有する。第1および第2の関節部は、リンク3、5の一方に対し衝撃吸収用のガタをもって取り付けられ、リンク3、5との他方に対し関節の軸周りに回転可能に取り付けられる。第1および第2のモータ9、11は、第1および第2の関節部を同じ方向に回転駆動することで、第1のリンクに対し第2のリンクを回転させ、第1および第2の関節部を逆方向に回転駆動することで、回転方向のガタの大きさを調整する。
(もっと読む)
モータ装置、回転子の駆動方法及びロボット装置
【課題】高トルクを発生させること。
【解決手段】回転子と、当該回転子の外周の少なくとも一部に掛けられた伝達部と、回転子と伝達部との間を回転力伝達状態として伝達部を一定距離移動させると共に回転力伝達状態を解消した状態で前記伝達部を所定位置に復帰させる駆動部と、前記伝達部及び前記駆動部のうち少なくとも一方を冷却する冷却部とを備える。
(もっと読む)
モータ装置及び回転子の駆動方法並びにロボット装置
【課題】高トルクを発生させることができるモータ装置を提供する。
【解決手段】回転子と、回転子の外周の少なくとも一部に掛けられた伝達部と、伝達部に接続され、印加された駆動電圧に応じて伝達部を移動させる複数の駆動部と、回転子と伝達部との間を回転力伝達状態とする保持力に対応する第1駆動波形を備える第1駆動電圧と、伝達部を移動させる駆動力に対応する第2駆動波形を備える第2駆動電圧とを複数の駆動部にそれぞれ印加させて、回転子と伝達部との間を回転力伝達状態として伝達部を一定距離移動させる駆動動作及び回転力伝達状態を解消した状態で伝達部を所定の位置に戻す復帰動作を駆動部に行わせる制御部と、を備える。
(もっと読む)
モータ装置、回転子の駆動方法及びロボット装置
【課題】高トルクを発生させること。
【解決手段】回転子と、当該回転子の外周の少なくとも一部に掛けられた伝達部と、回転子と伝達部との間を回転力伝達状態として伝達部を一定距離移動させると共に回転力伝達状態を解消した状態で伝達部を所定位置に復帰させる駆動部と、伝達部及び駆動部の少なくとも一方の振動を減衰させる弾性部とを備える。
(もっと読む)
多様な関節の形に適用可能なアクチュエータモジュール
【課題】多関節ロボットの関節部に利用されるアクチュエータにおいて、減速機とアクチュエータ本体を多様に配置することが出来て多様な関節の形に適用可能なモジュール構造を提供する。
【解決手段】アクチュエータモジュールは、電子部と駆動部が含まれ構成されたアクチュエータ本体100と分離・結合された減速機200が具備され、アクチュエータモジュール本体の1次減速によって得られた速度とトルクを2次減速機を通して変更することが容易であり、減速機がアクチュエータ本体と分離・結合されるため、多様な形の減速機を適用することが出来、減速機とアクチュエータ本体を多様に配置することが出来て多様な関節の形に適用可能であり、前記アクチュエータモジュールを利用して多様な関節構造を形成することが出来る。
(もっと読む)
万能結合構造を持つアクチュエータモジュール{ACTUATORMODULEHAVINGUNIVERSALARCHITECTURE}
【課題】より高い自由度と拡張性、互換性を揃えたロボットソリューションを提供することによって、使用者が自らロボットを変化させ、アップグレード出来る多関節ロボットに利用できるアクチュエータモジュールを提供する。
【解決手段】万能結合構造を持つアクチュエータモジュールに関するものである。アクチュエータモジュール自体に連結部材との結合のための固定片240を設置し、連結部材には固定片に対応する構造を持つ他の固定片を提供することで、通常のボルトとナットの結合手段を利用してより効果的な反復結合構造を形成できる万能結合構造を持つアクチュエータモジュールが開示される。
(もっと読む)
ベルト式減速装置およびそれを用いた駆動装置
【課題】小型化を図りつつ、高い静粛性を発揮することができるベルト式減速装置を提供する。
【解決手段】回転駆動力を入力する入力プーリ12と、入力プーリ12より大径に形成され、入力プーリ12に入力された回転駆動力を減速して出力する出力プーリ14と、無端状に形成され、入力プーリ12から出力プーリ14に亘って架けられた一本の無端状ベルト17を備える。そして、入力プーリ12と出力プーリ14は、回転軸方向にずれて配置される。さらに、回転軸方向から見て、入力プーリ12の外形円と出力プーリ14の外形円とは、少なくとも一部において重なるように配置される。
(もっと読む)
パラレルリンクロボット
【課題】一般に、ロボットの駆動源であるモータの取り付け方法として、モータフランジ面をプレートに固定し、このプレートを、ロボット本体に結合する構造を採用することが多い。パラレルリンクロボットにおいても、この構成が一般的である。しかしながら、従来の技術では、高速動作時の振動等の影響で、モータの主軸がぶれ、取り付け面とモータの相対位置がずれることにより、ロボットの位置決め精度が低下するという課題がある。
【解決手段】本発明のパラレルリンクロボットのモータ取付け方法は、対向するモータを取り付ける部材を有し、これを一体のブロック構造とするものである。これにより、従来の課題を解決し、少なくとも対向する2つのモータ主軸の中心軸を一致させ、高速動作時におけるロボットの位置決め精度低下を軽減する方法および装置である。
(もっと読む)
産業用ロボット
【課題】小型化が可能でかつパスラインを低くすることが可能な産業用ロボットを提供する。
【解決手段】産業用ロボット1は、本体部3と、第1アーム4と、第2アーム5と、第3アーム6と、本体部3と第1アーム4とを繋ぐ第1減速機21と、第1アーム4と第2アーム5とを繋ぐ第2減速機22と、第1減速機21の入力軸25と第2減速機22の入力軸32とを連結する連結機構23と、第3アーム6を回転駆動する第2駆動用モータ40とを備えている。産業用ロボット1では、第2アーム5と第3アーム6とを繋ぐ第3関節部の移動軌跡が直線状となるように、第1減速機21の減速比および第2減速機22の減速比が設定されるとともに、連結機構23が所定の速比で入力軸25と入力軸32とを連結している。また、第2駆動用モータ40は、第2アーム5の、第3関節部よりも先端側に、かつ、第1アーム4側へ突出するように第2アーム5に取り付けられている。
(もっと読む)
水平多関節ロボットおよびそれを備えた基板搬送システム
【課題】アームの駆動性を向上させて位置決めを向上させながらも、水平多関節ロボットのアームを薄型・小型化できるようにする。
【解決手段】第1アーム3が、第1アーム3の先端部上面において第1アーム3の基端側上面よりも高い面を有する第1アーム凸部43を有し、第2アーム27が、第2アーム27の先端部下面において第2アーム27の基端側下面よりも低い面を有する第2アーム凸部44を有し、第1アーム凸部43と第2アーム凸部44とが、上下方向の配置高さ範囲の少なくとも一部が互いに重なるように配置されるように構成した。
(もっと読む)
波動歯車装置及びロボットアーム
【課題】剛性が高く、回転に制限がない波動歯車装置及び波動歯車装置を備えたロボットアームを提供する。
【解決手段】波動歯車装置50は、電動モータ51と、波動歯車減速機52とを備えている。波動歯車減速機52は、第1の内歯車3bを有する外輪部材3と、第1の内歯車3bと異なる歯数の内歯が内周に形成された一対の第2の内歯車2a,2bと、可撓性歯車1とを有する。また波動歯車減速機52は、可撓性歯車1を、半径方向に撓ませ第1の内歯車3b及び一対の第2の内歯車2a,2bに噛合させるカム部材10を有する。一対の第2の内歯車2a,2bは、一対の固定用プレート4a,4bに固定されている。そして、一対の固定用プレート4a,4bがカム部材10を貫通するシャフト5に連結されている。
(もっと読む)
21 - 40 / 234
[ Back to top ]