
Fターム[3D232DD06]の内容
走行状態に応じる操向制御 (73,124) | 制御方式 (7,388) | 制御ゲインの設定 (997) | 制御ゲインが変更可能なもの (614)
Fターム[3D232DD06]に分類される特許
21 - 40 / 614
電動パワーステアリング装置
【課題】車輪回転速度が設計的に持つ誤差に起因するセルフアライニングトルクの誤推定による制御異常出力を防止することができる電動パワーステアリング装置を提供する。
【解決手段】操舵トルク検出手段で検出した操舵トルクに基づいて第1のトルク指令値を演算する第1のトルク指令値演算手段31と、車輪回転速度に基づいて第2のトルク指令値を演算する第2のトルク指令値演算手段32と、操舵トルクの異常を検出したときに、第1のトルク指令値に代えて第2のトルク指令値をモータ制御手段に出力する異常時切換手段34と備えている。第2のトルク指令値演算手段32は、車輪回転速度に基づいて推定したセルフアライニングトルク推定値に不感帯を設定し、不感帯反映後のセルフアライニングトルクに基づいて第2のトルク指令値を演算する。
(もっと読む)
規範応答演算装置およびそれを用いた車両用操舵装置

【課題】 規範応答のゲインおよび位相の特性を独立に設定できる規範応答演算装置およびそれを用いた車両用操舵装置を提供する。
【解決手段】 入力信号uに基づいて規範ヨー応答のベース値を演算する線形フィルタ14と、入力信号uの微分値du/dtを出力する微分器15と、入力信号uの微分値du/dtに基づいてゲインyを演算する非線形フィルタ17と、規範応答ベース値にゲインyを乗算して規範ヨー応答を演算する乗算器18と、を備える。
(もっと読む)
電動パワーステアリング制御装置
【課題】路面負荷に応じた操舵反力の特性の実現と、車両全体としての適切な操作安定性の実現とを両立させることが可能な電動パワーステアリング制御装置を提供する。
【解決手段】ベースアシスト部20は、路面反力に応じた操舵反力がハンドル側に返ってくるようにするためのベースアシスト指令Tb*を生成し、補正部30は、車両の不安定な挙動が適切に収斂するようにベースアシスト指令Tb*を補正するための補正トルク指令Trを生成する。そして、これら各指令Tb*,Trの和が最終的なアシストトルク指令Taとなる。ベースアシスト部20は、自身が生成したベースアシスト指令Tb*と実際に検出された操舵トルクTsに基づいて路面負荷を推定し、その推定した推定負荷Txに基づいて目標操舵トルクTs*を生成し、その目標操舵トルクTs*と操舵トルクTsの偏差に基づいてベースアシスト指令Tb*を生成する。
(もっと読む)
モータ制御装置およびこれを備える電動パワーステアリング装置
【課題】算出するモータの抵抗値と実際のモータの抵抗値との差をより短い期間で小さくすることのできるモータ制御装置、およびこれを備える電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、ステアリングの操舵状態が保舵状態のとき、過去に算出したモータ抵抗値Rmに応じて算出されるフィルタ値Rfを用いたフィルタ処理により、モータ抵抗値Rmを算出する。また、前回の保舵状態において算出したフィルタ値Rfである前回フィルタ値Rfoldを今回の保舵状態において算出されるモータ抵抗値Rmに反映する補正係数Gを、回転状態のときの電流積算値に基づいて変更する。
(もっと読む)
モータ制御装置
【課題】電流検出回路に故障が発生した場合でも、モータ制御の正常な動作を維持することができるモータ制御装置を提供する。
【解決手段】モータ制御装置は、インバータ回路1と、シャント抵抗Rsに流れるモータ電流を検出する第1電流検出回路10および第2電流検出回路20と、電流検出回路10、20の出力に基づいてモータ電流の検出値を算出するとともに、目標値のモータ電流を流すための指令値をPWM回路2へ出力する制御部3とを備える。第1電流検出回路10は正の第1ゲインを有し、第2電流検出回路20は第1ゲインを反転した負の第2ゲインを有する。制御部3は、第1電流検出回路10の出力に基づき算出した第1検出値と、第2電流検出回路20の出力に基づき算出した第2検出値とを用いて、電流検出回路の異常有無と、いずれの電流検出回路が異常であるかの判定を行い、正常な電流検出回路の検出値に基づいてモータ制御を行う。
(もっと読む)
インホイールモータを利用した車両制御方法
【課題】車体の安定性を確保するために、ESCシステムではなくインホイールシステムを利用することにより、車両を安定的に制御することができるインホイールモータを利用した車両制御方法を提供する。
【解決手段】操向角、ホイール速度、横加速度、ヨーレートを演算する段階、横加速度と予め設定された横加速度限界値を比較する段階、操向角、ホイール速度に基づいた運転手が要求する要求ヨーレートと車両の実測ヨーレートの差を予め設定されたヨーレートコントロール基準値と比較する段階、要求ヨーレートと実測ヨーレートの差がヨーレートコントロール基準値よりも大きい場合には、要求ヨーレートと実測ヨーレートを比較する段階、要求ヨーレートと実測ヨーレートの差によって最終トルク値を発生させる段階を含むことを特徴とする。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】非干渉化制御を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置および電動パワーステアリング装置を提供する。
【解決手段】モータ(1)の回転角度を微分してモータ回転角速度を演算するモータ回転角速度演算手段(60)と、そのモータ回転角速度を信号処理するローパスフィルタ(63)を有する。そして、モータの回転角度と、ローパスフィルタのゲインの関係を示すマップ(61)から演算された値により、ローパスフィルタ(63)のゲインを変更するローパスフィルタゲイン変更手段(80)を有する。そして、ゲインが変更されたローパスフィルタ(63)に基づいて出力されるモータ回転角速度に基づき、モータの逆起電力により発生する電流を相殺するように、モータに電流を流す非干渉制御を実行する。
(もっと読む)
車両用操舵装置
【課題】車両が砂利道等を走行している場合に、転舵輪の振動が操舵部材に伝達されるのを抑制できる車両用操舵装置を提供する。
【解決手段】伝達比可変装置7は、第1シャフト11および第2シャフト12を差動回転可能に連結する差動機構13と、差動機構13を駆動する伝達比変更用モータ14とを有している。伝達比変更用モータ14は、実act角演算部76によって演算された実act角θactが目標act角演算部71によって演算された目標act角θact*に等しくなるようにフィードバック制御される。外乱判定部77によって第2シャフト12に外乱が入力されていると判定されたときには、伝達比変更用モータ14のフィードバック制御に用いられる比例ゲインKPが通常よりも低減される。
(もっと読む)
電動パワーステアリング装置
【課題】3相電動モータで1相に異常が発生したときに、操舵フィーリングを悪化させることなく、残りの2相を用いてモータ駆動を継続できる電動パワーステアリング装置を提供する。
【解決手段】異常検出手段で各相コイルのうちの1相の駆動系統に通電異常を検出したとき、異常時モータ指令値算出手段34で、操舵補助電流指令値Irefに基づいて残りの2相のコイルを使用する異常時相電流指令値を算出し、その異常時相電流指令値に基づいて3相電動モータ12を駆動する。その際、操舵トルク及び前記3相電動モータ12で発生する操舵補助トルクの和と外力との釣合い時に、前記異常時相電流指令値を低下させる電流指令値補正手段を備えている。
(もっと読む)
車両運転支援装置
【課題】ドライバーの運転操作の経年的な衰えを検出し、検出した衰えに応じた車両運転の支援を行う。
【解決手段】ドライバーの年齢別およびブレーキ操作開始時の車速別に、車両のブレーキ操作開始から車両停止までの期間における、車両の減速挙動を表す減速挙動データ(制動距離、減速度の標準偏差)を、減速時学習データとして記録し、当該減速時学習データが記録された後、車両のブレーキ操作開始時(ステップ210)に、減速時学習データ中の最新の期間における減速挙動データのうち現在の車速に相当する減速挙動データと、学習データ中の最新よりも過去の期間における減速挙動データのうち現在の車速に相当する減速挙動データと、を比較し(ステップ220)、その比較結果に基づいて、ドライバーの運転能力が所定基準以上に衰えているか否かを判定し(ステップ230、240)、判定結果に応じて制動力を変化させる。
(もっと読む)
電動パワーステアリング装置
【課題】トルクセンサの異常時においても、継続して安定したステアリング操作を行なうことのできる電動パワーステアリング装置を提供すること。
【解決手段】操舵トルクセンサの異常が検出された場合には、操舵トルクセンサに替えて、横Gに基づくアシスト力目標値に相当するモータトルクを発生させ、駆動電力の供給を実行することによりアシスト制御を継続する。その結果、横Gに基づくアシスト力目標値を発生させているので、路面状況の変化等を運転者に十分伝えることができ、操舵フィーリングの向上が図れる。
(もっと読む)
電動パワーステアリング装置
【課題】簡易な構成でタイヤのグリップの喪失を検出でき、グリップロス度を位相補償し、補正操舵トルク又は補正係数を演算して電流指令値を高速に補正し、車両挙動の一層の安定化が可能な電動パワーステアリング装置を提供する。
【解決手段】モータの角速度に基づいて収れん性制御信号を出力する収れん性制御部と、車両のラック軸上に生じる外力をSAT検出値として検出するSAT検出部と、路面から生じるSATを車両モデルに基づいてSAT推定値として推定するSAT推定部と、SAT検出値及びSAT推定値に基づいてタイヤのグリップが失われた度合いを表すグリップロス度を検出するグリップロス度検出部と、グリップロス度を位相補償する位相補償部と、位相補償されたグリップロス度に基づいて補正操舵トルクを演算する補正値演算部とを具備し、補正操舵トルクと収れん性制御信号とで電流指令値を補正する。
(もっと読む)
車両用操舵装置
【課題】切り戻し操舵時に違和感を生じさせることなく、ステアリング中立近傍において切り込み操舵時の応答性を向上させることのできる車両用操舵装置を提供すること。
【解決手段】ギヤ比可変制御演算部23は、ステアリング中立近傍の小舵角領域において、そのステアリングギヤ比が、よりクイックな値となるように、操舵角θsに応じたギヤ比可変指令角θvg*を演算する。また、ギヤ比可変制御演算部23は、運転者によるステアリング操作の状態(操舵状態)が「切り込み」又は「切り戻し」の何れであるかを判定する操舵状態判定部34を備える。そして、ギヤ比可変制御演算部23は、その操舵状態が「切り戻し」である場合には、直前のステアリングギヤ比が維持されるように、そのギヤ比可変指令角θvg*を演算する。
(もっと読む)
電動パワーステアリング装置
【課題】車速によらず、制御安定性を確保するとともに、操舵フィーリングが低下することのない電動パワーステアリング装置を提供する。
【解決手段】電動モータにアシストトルクを発生させるアシスト電流Iaの値を、操舵トルクセンサ30により検出された操舵トルクVT3の値で割った除算値(アシスト電流/操舵トルク=Ia/VT3)が大きい程、操舵トルクセンサ30から出力される操舵トルクVT3に対して大きな遅れ位相補償(小さな進み位相補償)を施すようにしたので、制御安定性が確保されるとともに、操舵フィーリングが低下する除算値の小さい領域では、大きな進み位相補償を施すようにしたので、良好な操舵フィーリングが得られる。よって、低速での操舵フィーリングも低下することがない。
(もっと読む)
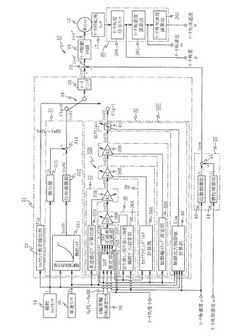
電動パワーステアリング装置
【課題】 電流センサ31が故障した場合でも、操舵アシストの追従性の低下を抑制して、良好な操舵アシストを継続させる。
【解決手段】 異常時制御量演算部80においては、基本電圧演算部81が目標電流I*に比例した基本電圧V0を計算する。また、回転角速度推定部82が操舵トルクセンサ21に設けられた回転角度センサ21bの回転角度θoutを微分してモータ回転角速度ωを推定し、補正電圧演算部83がモータ回転角速度ωに比例した補正電圧V1を計算する。電圧値加算部84は、基本電圧V0に補正電圧V1を加算して電圧指令値V*を計算する。
(もっと読む)
車両のパワーステアリング装置
【課題】ドライバのフィーリングに合致した操舵アシスト力を発生させることができるパワーステアリング装置を提供する。
【解決手段】操舵制御部20は、操舵時にドライバが入力する実舵力Tsと当該実舵力Tsに対してドライバが入力したと感じる感受舵力Th_bとの関係について設定した感受特性を用い、基本アシスト力Tassist_bを付与した操舵系に対してドライバが操舵を行う際のハンドル角θと実舵力Tsとの関係を示す実舵力特性Ts(θ)を、ハンドル角θと感受舵力Th_bとの関係を示す感受舵力特性Th_b(θ)に変換し、この感受舵力特性Th_bを線形的に変化させるために必要な補間量ΔThを示す感受舵力補間特性を設定するとともに、感受特性を用いて感受舵力補間特性を変換して舵力補間特性を設定する。
(もっと読む)
電動パワーステアリング装置の制御方法
【課題】電動パワーステアリング装置の操作フィーリングを向上するとともに、電源変動に対する耐性を向上する。
【解決手段】電動パワーステアリング装置の制御部10は、電源50の出力電圧値の変動にともなって、デューティ比モータ電流値特性が変化する現象に対処することができる。具体的には、F/Fデューティリミット値設定部53は、電圧値計測部51によって計測された電源50の出力電圧値を用いて、フィードフォワード制御を行う範囲を示す折れ点のデューティ比を推定する。また、ゲイン補正値設定部54は、折れ点以降の傾きの変化に対処するために、電源50の出力電圧値に基づいて、フィードバック制御におけるゲインの補正値を推定する。そして、制御部10は、推定した折れ点のデューティ比およびゲインの補正値を用いて、モータ電流Imの電流応答性を同じにすることができる。
(もっと読む)
車両用情報処理装置
【課題】簡易な構成で現在位置よりも先の車両位置における車両の旋回曲率を推定する。また、望ましくは推定された旋回曲率を車両挙動の安定化に利用する。
【解決手段】車両(1)に搭載される車両用情報処理装置(100)は、操舵入力に対応する操舵入力情報、旋回状態を規定する車両状態量及び車速に基づいて、前記車両の将来位置を算出する将来位置算出手段と、前記算出された将来位置を少なくとも一つ含み、且つ前記車両の現在位置に対応する車両位置を含む、前記車両に係る三以上の車両位置に基づいて、前記現在位置よりも先の暫定走行位置における前記車両の旋回曲率を推定する推定手段とを具備する。
(もっと読む)
操舵装置
【課題】ドライバが違和感を覚えることのない、ドライバの感覚に合った操舵を行うことができるようにする。
【解決手段】予め定められたハンドルの舵角と車両に発生するヨー角速度との関係を実現することにより、ドライバの視点から見た、車両の走行する目標コース上の予め定められた前方注視時間後の目標到達点の方向θgazeβと、ハンドルの基準位置の方向δswとを一致させるように定められた、ハンドルの舵角とヨー角速度ゲインとの関係を示すマップに従って、ヨー角速度ゲインの目標値を算出し、ステアリングギヤ比を制御する。ドライバの手応え量が、ヨー角速度の増加に従って単調増加する、ヨー角速度と手応え量との予め定められた関係に基づいて、検出された舵角及び取得されたヨー角速度に対応する操舵トルクを目標値として設定し、操舵トルクの目標値が実現されるように制御する。
(もっと読む)
電動パワーステアリング装置
【課題】遅れなく振動を抑制することができ、操舵フィーリングの優れた電動パワーステアリング装置を提供する。
【解決手段】ECU23は、モータ制御信号を出力するマイコン41と、そのモータ制御信号に基づいてモータ21に駆動電力を供給する駆動回路42とを備えた。マイコン41は、電流偏差ΔIにF/BゲインKを乗ずることにより電圧指令値V*を演算するF/B制御部57と、電圧指令値V*に基づいてモータ制御信号を生成するPWM変換部58とを有するモータ制御信号出力部44を備えた。そして、モータ制御信号出力部44に、車両が直進状態である場合にF/BゲインKの値を低応答値に変更するF/Bゲイン演算部61を設けた。
(もっと読む)
21 - 40 / 614
[ Back to top ]