
Fターム[3D232EA01]の内容
走行状態に応じる操向制御 (73,124) | 制御対象(操舵対象) (2,739) | 2WS(前輪) (1,954)
Fターム[3D232EA01]に分類される特許
21 - 40 / 1,954
車両の障害物回避装置
【課題】
減速による障害物回避と横移動による障害物回避とを適切に選択できる車両の障害物回避装置を提供すること。
【解決手段】
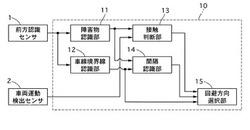
自車両前方の障害物を認識する障害物認識部11と、自車両が走行している左右両側の車線の車線境界線を認識する車線境界線認識部12と、認識された障害物と認識された車線境界線との間隔Wl,Wrを認識する間隔認識部14と、認識された間隔Wl,Wrが予め設定された自車両の幅Wv以下である方向への横方向への障害物回避を禁止し、間隔Wl,Wrが自車両の幅Wvより大きい方向への横方向への障害物回避を許可し、自車両が認識された車線境界線を跨いで走行しているときには横方向への障害物回避を許可し、横方向への障害物回避が禁止された場合には車両を減速させる回避方向選択部15と、を備えた。
(もっと読む)
操舵装置

【課題】車速センサがフェールした場合であっても、操作性および操縦安定性の低下を抑制する。
【解決手段】操舵装置10は、右側操舵入力部20Rと、左側操舵入力部20Lと、車速センサ40と、右側操舵入力部20Rおよび左側操舵入力部20Lの少なくとも一方の操舵角に応じて操舵輪RWを転舵する転舵機構12と、ステアリングECU30により検出された車速に基づいて、右側操舵入力部20Rおよび左側操舵入力部20Lの少なくとも一方の操舵角に対する操舵輪の転舵角の比である舵角比を設定するステアリングECU30とを備える。ステアリングECU30は、車速センサ40がフェールした場合、右側操舵入力部20Rの操舵角に対する操舵輪RWの転舵角の比である第1舵角比と、左側操舵入力部20Lの操舵角に対する操舵輪RWの転舵角の比である第2舵角比とを異なる値に設定する。
(もっと読む)
車両用操舵装置
【課題】操舵部材のロック状態が解除された直後から、精度の高いロータ回転角を演算することができる車両用操舵装置を提供する。
【解決手段】EPSモータ制御部33の動作モードには、通常モードと強制回転モードとがある。通常モードは、ステアリングロック装置4によってステアリングホイール1の回転がロックされていない通常運転状態においてEPSモータ7を駆動制御するモードである。一方、強制回転モードは、イグニッションキーがオンされた直後において、ステアリングロック装置4によってステアリングホイール1の回転がロックされている状態で、EPSモータ7を強制的に回転駆動するモードである。EPSモータ7が強制回転モードで回転駆動されているときに、回転角演算部34は、各磁気センサ21,22が感知している磁極を特定する。
(もっと読む)
電動パワーステアリング装置
【課題】 自動停止条件の成立後に操舵トルクが増加する場合であっても、操舵トルクの急変を抑制可能な電動パワーステアリング装置を提供する。
【解決手段】 電動パワーステアリング装置10は、ステアリング系20の操舵トルクを検出する操舵トルクセンサ41と、ステアリング系20に補助トルクを与える電動モータ43と、操舵トルクに基づく目標電流値で電動モータ43のモータ電流値を制御するモータ電流制御部42と、を備える。モータ電流制御部42は、自動停止条件が成立するとエンジンを停止させるアイドリングストップ制御部100の自動停止条件が成立することに起因して、目標電流値を目標電流上限値以下に設定する。目標電流上限値は、目標電流値を目標電流上限値以下に設定することを開始した時Tsの目標電流値Imsと関連する。
(もっと読む)
電動パワーステアリング装置
【課題】二重制御系統を備えた電動パワーステアリング装置において、サブマイクロコンピュータの実装を必要としない電動パワーステアリング装置を提供する。
【解決手段】制御装置5A,5Bを2系統有し、各制御装置5A,5Bは、相手系統の故障を推定する故障推定部56,66を備え、故障推定部56,66は、電動モータ1a,1bの出力値が目標指令値に収束する時間Teを監視し、この収束時間Teが基準時間γよりも長い場合に、他系の制御装置の故障を推定するものであり、他系の制御装置の故障を推定した正常側の制御装置は、正常側の制御装置の制御周期T0を短くしかつ制御ゲインK0を上げる制御を行う。
(もっと読む)
車両用走行支援装置
【課題】 車線逸脱の抑制とドライバに与える違和感の軽減との両立を図ることができる車両用走行支援装置を提供する。
【解決手段】 走行路上の自車前方に、車速Vに応じた前方注視点距離Lsだけ離れた目標走行位置Pを設定し、自車が設定した目標走行位置Pを走行するように自車の走行を支援する車両用走行支援装置において、走行路に対する自車の向きを判定する姿勢判定部14aと、自車が走行路外側を向いている場合、自車の向きが走行路と平行である場合よりも車速Vに応じた前方注視点距離のベース値Ls_baseを短縮した前方注視点距離Lsを設定する前方注視点距離設定部14と、を備えた。
(もっと読む)
電動パワーステアリング装置
【課題】電動モータのトルクが伝達されるラックが可変比ラックである電動パワーステアリング装置において、操舵状況に応じた適切な操舵補助を実現できる電動パワーステアリング装置を提供する。
【解決手段】q軸電流指示値生成部は、現在のラック軸位置におけるアシスト側ラックゲインGaを求める。次に、q軸電流指示値生成部は、操舵トルクとアシスト側ラックゲインGaがラックゲイン基準値Gaoである場合のq軸電流指示値(基準q軸電流指示値Iqo*)との関係を記憶したマップを用いて、操舵トルクTに応じた基準q軸電流指示値Iqo*を求める。次に、q軸電流指示値生成部は、基準q軸電流指示値Iqo*を、アシスト側ラックゲインGaに対応したq軸電流指示値Iq*に変換する。
(もっと読む)
車線維持支援装置
【課題】 車線維持支援制御時にドライバが操舵力を緩めたときのドライバの違和感を抑制する車線維持支援装置を提供すること。
【解決手段】 走行車線に対する自車両の横変位に応じて操舵反力アクチュエータにより発生させる操舵反力を演算し、付加反力指令値の方向と操舵の方向との比較に基づき、横変位と操舵速度に応じて付加操舵反力指令値を減少させる補正値を演算するようにした。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】d軸電流指令値設定部31、d軸電流偏差演算部32、ロータ角度制御部33、ロータ角度演算部34および速度演算部35から構成されるロータ角度推定手段によって、ロータ角度θが推定される。q軸電流指令値設定部21は、トルクセンサ1によって検出される操舵トルクおよび車速センサ2によって検出される車速に応じたモータトルクをモータ5から発生させるためのq軸電流指令値Iq*を設定する。d軸電流指令値設定部24は、d軸電流指令値Id*を設定する。q軸電流指令値Iq*と、d軸電流指令値Id*と、q軸電流検出値Iqと、d軸電流検出値Idと、推定されたロータ角度θとに基づいて、モータ5に供給される電流が制御される。
(もっと読む)
電動パワーステアリング装置
【課題】簡素な構成にて効果的に車両の偏向が抑えられ、快適な操舵フィーリングを得ることができる電動パワーステアリング装置を提供することにある。
【解決手段】電流指令値演算部22には、ローパスフィルタ処理後トルクTの変化量が所定値以内であり、かつローパスフィルタ処理後トルクTの変化量が所定値以内である時間が、所定時間以上継続した場合には、操舵トルクτを低減するための補正成分としてのリードプル補正量Iip*を演算するリードプル補正制御部27が設けられている。そして、電流指令値演算部22は、このリードプル補正制御部27の演算するリードプル補正量Iip*を、加算器28において、基本アシスト制御部26の演算する基礎成分としての基本アシスト制御量Ias*に重畳することにより、そのパワーアシスト制御における目標アシスト力としての電流指令値Iq*を演算する。
(もっと読む)
電動パワーステアリング装置
【課題】ステアリングホイールの操舵をアシストする通常制御時に、電源リレーのショート故障を診断することの可能な電動パワーステアリング装置を提供する。
【解決手段】電源からインバータ回路を経由してモータに電力を供給する配線に設けられた電源リレーは、異常時に電源からインバータ回路への通電を遮断する。マイコンは、ステアリングホイールの操舵をアシストする通常制御時に、ステアリングホイールが操舵されていないとき(S4:NO)、電源リレーのショート故障を診断する。EPSは、ステアリングホイールの操舵がされていない時に電源リレーにより通電を遮断することで(S5)、ステアリングホイールの操舵のアシストに影響を与えることなく、電源リレーのショート故障を診断することができる。
(もっと読む)
車両用操舵装置
【課題】電動パワーステアリング装置の異常によるアシスト停止後もステアリング操作により車両の旋回を継続できる車両用操舵装置を提供する。
【解決手段】ABS装置30は、電動パワーステアリング装置1のECU11の制御状態量である操舵トルクτを取得する(ステップS401)。異常検出信号Spsfの入力があるか否かを判定し(ステップS402)、異常検出信号Spsfの入力がある場合(ステップS402:YES)には、続いてステアリング操作中であるか否かを判定する(ステップS403)。ステアリング操作中であると判定した場合(ステップS403:YES)には、受信した操舵トルクτに基づき、所定の転舵輪7に付与する制動力を演算する(ステップS404)。ここで、通常時の制動力に演算された制動力分が補正される。そして、その制動力を制御指令として出力(ステップS405)し、ブレーキアクチュエータ31を制御する。
(もっと読む)
ステアバイワイヤ式操舵機構の制御装置
【課題】 車両運動モデルを導入した複雑な制御系を構築することなく、路面左右の摩擦係数の違いや横風等に対する外乱安定化制御を簡単に実現する。
【解決手段】 舵角指令の主な値となるフィードフォワード値を生成するフィードフォワード値生成手段21と、外乱補正用のフィードバックによる補正量を生成する外乱補正量生成手段22と、前記フィードフォワード値と補正量とを加算して前記転舵モータ15を駆動する舵角指令を生成する比較手段23とを有する。外乱補正量生成手段22は、車両速度とハンドル角から、車両20に生じる横加速度を演算し、外乱検出手段25による横加速度の実測値が目標値に追従するように前記補正量を演算する。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】スタックの解消に対してより高く貢献することのできる電動パワーステアリング装置の制御装置を提供する。
【解決手段】電動パワーステアリング装置の制御装置は、アシストモータの電流制御により転舵輪の転舵角θtを変更する自動操舵制御を行なう。そして、自動操舵制御により転舵輪のグリップが発生した転舵角θtを検出する。
(もっと読む)
パワーステアリング装置
【課題】路面からの逆入力により発生する操舵機構の振動をより精度良く検出することができるパワーステアリング装置を提供する。
【解決手段】入力軸(第3コラムシャフト)に設けられ、入力軸に生じる歪振動を検出する第1歪センサと、出力軸(ピニオンシャフト)に設けられ、出力軸に生じる歪振動を検出する第2歪センサと、第2歪センサの出力信号である第2歪振動V2の位相が第1歪センサの出力信号である第1歪振動V1よりも進んでいるか否かを判断する位相判断回路84と、位相判断回路84が、第2歪振動V2の位相が第1歪振動V1の位相よりも進んでいると判断するとき、路面から操舵機構に対して作用する逆入力トルクが作用していると判断し、逆入力トルクが低減する方向に電動モータ60の駆動電流を補正する駆動電流補正回路(強化ゲイン設定回路824)と、を有する。
(もっと読む)
車両のパワーステアリング制御装置
【課題】特に、中立位置からのステアリングホイールの切り出しにおいて、ドライバが感じるフリクション感を適切に打ち消して滑らかで良好な操舵フィーリングを実現する。
【解決手段】車速Vと操舵トルクTsを基に基本アシストトルクTbを設定し、ハンドル角の絶対値|θH|が高いほど操舵する方向への基本アシストトルクTbを増大させる方向に補正する第1の補正値ΔT1を設定し、ハンドル角速度の絶対値|dθH/dt|が高いほど操舵する方向への基本アシストトルクTbを減少させる方向に補正する第2の補正値ΔT2を設定し、少なくともステアリングホイールの中立位置からの切り始めにおいて第1の補正値ΔT1と第2の補正値ΔT2との差を第1の補正値ΔT1で補正する方向におけるアシスト補正量ΔTaとして算出し、こうして求めたアシスト補正量ΔTaで基本アシストトルクTbを補正して制御量としてモータ駆動部21に出力する。
(もっと読む)
車両のパワーステアリング制御装置
【課題】パワーステアリングによりダンピング補正を精度良く適切に行って、スッキリとした操舵フィーリングを維持し、たとえ、比較的素早い切り返し操舵時等であってもドライバがしっかりステアリングホイールを握らなくても安定感のある操舵フィーリングを実現する。
【解決手段】車速Vと操舵トルクTsを基に基本アシストトルクTbを設定し、ヨーレートγとハンドル角速度(dθH/dt)とが同符号の場合は、アシスト補正量ΔTaを0とし、ヨーレートγとハンドル角速度(dθH/dt)とが異符号の場合は、ヨーレートの絶対値|γ|に基づいてダンピング補正量Gdを算出してこのダンピング補正量Gdとハンドル角速度(dθH/dt)とに基づいてアシスト補正量ΔTaを算出し、アシスト補正量ΔTaで基本アシストトルクTbを補正してアシストトルクTaとする。
(もっと読む)
車両のパワーステアリング制御装置
【課題】アシストトルクに対する補正量のピークの位相を遅らせることなく、操舵状態の切り替わり時の急激な変化を抑制することができる車両のパワーステアリング装置を提供する。
【解決手段】操舵制御部20は、ドライバによる操舵状態が切り増し状態のときと切り戻し状態のときとで選択的に切り替わる操舵ゲインG0を生成し、当該操舵ゲインG0を無次元数G0’に変換してレートリミット処理を行い、レートリミット処理後の操舵ゲインGを用いて基本アシストトルクTbを補正して最終的なアシストトルクTaを演算する。これにより、基本アシストトルクTbに対するアシスト補正量ΔTaのピークの位相を遅らせることなく、操舵状態の切り替わり時の急激な変化を抑制することができる。
(もっと読む)
電動パワーステアリング装置
【課題】モータロックを防止することにより、システムの安定的な停止が図れ、安全な電動パワーステアリング装置を提供する。
【解決手段】
マイコン17は、短絡異常検出フラグがオンの場合には、短絡異常判定検出中と判断して、積算判定を実行する。そして、マイコン17は、短絡異常確定フラグがオンの場合には、通電不良発生相以外の二相を通電相とするアシスト力を発生中に、通電不良発生相が、通電不良発生相以外の二相のうちの一相と短絡異常確定となったと判断して、アシスト力の発生を停止する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】通電不良の発生に伴う二相駆動時のモータ回転を円滑化して安定的に高い出力性能を確保することのできるモータ制御装置及び電動パワーステアリング装置を提供すること。
【解決手段】マイコンは、所定のサンプリング周期で取得した各電流センサの出力信号に基づいて、モータの各相電流値を検出する。そして、今回の検出値とともに少なくとも前回の検出値が保持される。そして、当該二相駆動時には、今回の電流検出時における回転角と前回の電流検出時における回転角との間に漸近線に対応する所定の回転角を挟む場合には、その保持された今回の検出値及び前回の検出値について、その絶対値がより大きな値となるように補正する。
(もっと読む)
21 - 40 / 1,954
[ Back to top ]