
Fターム[2B076EA01]の内容
収穫機本体(機枠、駆動) (12,770) | 駆動機構の自動制御 (620) | 1つの検出対象→1つの制御対象 (129)
Fターム[2B076EA01]に分類される特許
21 - 40 / 129
コンバイン
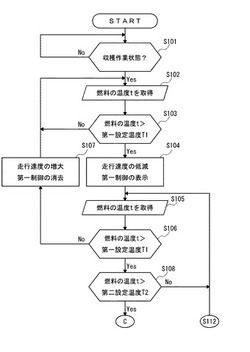
【課題】作物の収穫作業中であっても、燃料が高温となることでエンジンの作動不良が生じることを防止できるコンバインを提供する。
【解決手段】コモンレール式ディーゼルエンジン71を搭載したコンバインであって、前記ディーゼルエンジン71の回転及び機体の走行速度を制御する制御手段100と、走行速度Vを設定する変速操作手段94と、当該変速操作手段94の操作量Aを検出し前記制御手段100に送信する変速操作量検出手段94aと、前記制御手段100からの出力値を基に、前記変速操作手段94の操作量Aに対応する走行速度Vとする変速手段82aと、前記コモンレール754に供給される燃料の温度tを検出する燃料温度検出手段171と、を備え、前記制御手段100は、前記燃料の温度tが第一設定温度T1を越えると、前記操作量Aに対応する設定走行速度を低減することで走行速度Vを制限する制御をする。
(もっと読む)
コンバインの引起し構造

【課題】刈取り部の前部に複数の引起し装置を左右に並列配備したコンバインの引起し構造において、引起し装置の並列台数の異なった刈取り部を低コストで製作できるようにする。
【解決手段】引起し装置13の上部に横長の支持フレーム38を横架配備し、この支持フレーム38の横方向複数箇所に引起し駆動ケース40を支持するとともに、各引起し駆動ケース40に各引起し装置13を連動連結し、支持フレーム38に並列支持された引起し駆動ケース40をカウンタ軸41で連動連結して全引起し装置13を同調駆動するよう構成してある。
(もっと読む)
収穫機
【課題】作物の上端部の高さに適切に対応して取入部の高さを調整可能な収穫機を提供する。
【解決手段】コンバイン(収穫機)は、本体と、取入部と、収穫部昇降シリンダ18と、を備える。取入部は、立毛状態の作物から必要部分を分離して取り入れる。収穫部昇降シリンダ18は、取入部を本体に対して昇降させる。本体は、作物の上端部を検出する超音波センサ17を備える。そして、収穫部昇降シリンダ18は、超音波センサ17の検出結果に基づいて、取入部を昇降させる。
(もっと読む)
収穫機
【課題】立毛状態の作物から必要部分を分離して収穫を行う収穫機において、分離作業を効率的に行う構成を提供する。
【解決手段】コンバイン(収穫機)は、分離部と、走行速度検出部と、制御部と、を備える。分離部は、立毛状態の穀稈と接触した状態で回転することにより、当該穀稈から穀粒を分離する。走行速度検出部は、走行速度を検出する。制御部は、走行速度検出部が検出した走行速度に基づいて、分離部(詳細には分離部本体)の回転速度を制御する。
(もっと読む)
コンバイン
【課題】油圧ポンプの回転速度とは無関係に、単独で、前記油圧モータの回転速度を低速側に変更操作して、未刈り穀稈(倒伏穀稈など)を刈取ることができる一方、圃場間の移動など路上走行において、前記油圧ポンプの回転速度とは無関係に、単独で、前記油圧モータの回転速度を変速操作して高速側に移動速度を変更操作できるようにしたコンバインを提供するものである。
【解決手段】油圧ポンプ105及び油圧モータ106を備える無段油圧変速機構107を設け、前進回転状態及び後進回転状態に無段階に変速自在な可変容量形に前記油圧ポンプ105を構成したコンバインにおいて、前記油圧モータ106の回転速度を、路上走行速度などの高速度、標準刈取速度などの中速度、または倒伏穀稈を刈取る倒伏刈取速度などの低速度に、変更操作可能な可変容量形に前記油圧モータ106を構成したものである。
(もっと読む)
コンバイン
【課題】作業走行中におけるエンジン回転数及び走行変速レバーや刈り取り変速レバーの操作位置の視認性を高められるようにして、搭乗運転部の作業者が、視認した刈取搬送部での穀稈の流れ具合やエンジン回転数などに基づいて走行速度や刈取搬送部の作動速度を変更する必要性を感じた場合に、走行用の変速レバーや刈り取り搬送用の変速操作具による変速操作を迅速かつ適切に行えるようにする。
【解決手段】車体前部の左右一方の位置に搭乗運転部3を形成し、車体前部の左右他方の位置に刈取搬送部4を昇降可能に連結装備してあるコンバインにおいて、搭乗運転部3における刈取搬送部4側の横側端部で運転座席14よりも車体前側の位置に、走行用の変速レバー34と、刈り取り搬送用の変速操作具72と、エンジン回転数を表示する表示器32とを配備した。
(もっと読む)
コンバイン
【課題】
コンバインにおいて、刈取無段変速装置の変速検出用の刈取トラニオン軸検出センサの異常を判定し、異常時には刈取無段変速装置の駆動を減速し停止し、刈取作業の安全を確保すると共に、刈取穀稈の滞留や詰まりを防止する。
【解決手段】
刈取無段変速装置(19)のトラニオン軸の変速状態を検出する刈取トラニオン軸検出センサ(SE1)と、刈取無段変速装置(19)を変速制御するコントローラ(35)と、コントローラ(35)における刈取無段変速装置(19)の刈取自動変速の入切を指定する刈取自動変速入切スイッチSW1とを備えたコンバインにおいて、刈取変速手段を変速操作したときに刈取トラニオン軸検出センサ(SE1)が変速検出をしない場合には、刈取トラニオン軸検出センサ(SE1)を異常と判定し、異常判定時には刈取無段変速装置(19)を減速し所定時間後に停止させる機能を前記コントローラ(35)に持たせる。
(もっと読む)
コンバイン
【課題】発進時に走行ショック現象による走行安定性の低下。
【解決手段】刈取部4は専用の刈取搬送用静油圧式無段変速装置21により走行速度に同調して回転速度を変速駆動する。変速レバー70の操作位置を操作位置検出手段71を設け、該操作位置検出手段71の検出信号に応じて走行用静油圧式無段変速装置20を増減速制御する構成とし、走行速度を検出する車速センサ77を設け、該車速センサ77の検出信号に応じて刈取搬送用静油圧式無段変速装置21を増減速制御することで前記前記刈取部4と前側供給搬送装置13を走行速度に同調して変速駆動する構成とし、走行停止状態から変速レバー70の増速操作を開始した初期の走行速度の加速度合いよりも。変速レバー70の減速操作を開始した初期の走行速度の減速度合いの方が大きくなる設定としたことを特徴とするコンバイン。
(もっと読む)
コンバイン
【課題】圃場での穀稈収穫作業中に旋回を行っても切断排稈の圃場散布が圃場の全面で行われるようにする。
【解決手段】機体の後部に脱穀後の排藁を切断するカッター(8)を装着したコンバインにおいて、刈取前処理装置(3)からフィードチェン(13)への引き継ぎ位置近傍に穀稈を検出する穀稈引継センサ(11)を設け、刈取前処理装置(3)を一定高さ以上に上昇させても、穀稈引継センサ(11)が穀稈を検出している場合にはフィードチェン(13)を駆動し続け、穀稈引継センサ(11)による穀稈検出が途絶えると直ちにフィードチェン(13)の駆動を停止させる制御を行ない、刈取前処理装置(3)を下降させて刈取を再開して前記穀稈引継センサ(11)が穀稈を検出するとフィードチェン(13)を駆動する制御を行なう構成とする。
(もっと読む)
作業車
【課題】作業能率を良好に確保したまま、原動機部の過負荷制御を行うこと。
【解決手段】自走可能な走行部と作業を行う作業部とこれら走行部と作業部を駆動する原動機部とを備える作業車において、原動機部の負荷を検出する負荷検出手段と、負荷検出手段により検出される負荷検出情報に基づいて走行部の走行速度を自動的に制御する走行速度制御手段とを備えて、負荷検出手段が原動機部の過負荷を検出した場合には、走行速度制御手段が走行部の走行速度を強制的に減速して原動機部の過負荷状態を解消する制御を行う作業車であって、負荷検出手段によって検出される負荷検出情報を加工処理する情報加工処理手段と、情報加工処理手段が加工処理する負荷検出情報の加工処理度合いを強弱調節する強弱調節手段とを備えているを特徴とする。
(もっと読む)
作業車両
【課題】変速操作具13の初期の手動操作方向を感知して補助力アクチュエータ222を正逆回転駆動させ、変速操作具13の手動操作に対して、補助力アクチュエータ222の回転駆動力を補助力として付与する構造を備えた作業車両において、油圧無段変速機53からのトルク反力の影響を抑制して、補助力アクチュエータ222のコンパクト化を図る。
【解決手段】変速操作具13の手動操作にて作動する変速部材227と、補助力アクチュエータ222の駆動にて作動するアシスト部材277とを備える。変速部材227とアシスト部材277とをアーム杆281にて連動連結する。アシスト部材277の作動にて油圧無段変速機53の変速出力を調節するように構成する。変速部材227及びアシスト部材277は、それぞれを位置保持する摩擦部材230,280を有する。
(もっと読む)
コンバインの刈取フローティング装置
【課題】刈取搬送装置を、安定した弾性力で位置保持し、地表面基準で異常振動の発生も少なく、安定した作業走行が行なえるものとする。
【解決手段】走行フレーム(1)の前部に、刈取搬送装置(2)を、支持した刈取バランススプリング装置(3)のスプリング張力を、土壌の接地センサ(4)、又は走行負荷センサ(5)の検出情報に基づいて、いずれか一方の取付位置を、他方に対して遠近方向に自動的に調節してバランススプリング(8)の全長を変更することにより調整する構成とした。また、刈取バランススプリング装置(3)は、そのスプリング張力を、接地センサ(4)、又は走行負荷センサ(5)の検出情報に基づいて、走行フレーム(1)側の取付位置か、又は刈取搬送装置(2)側の取付位置のいずれか一方を、他方の取付位置に対して上下方向に取付位置を自動的に調節して前記バランススプリング(8)の全長を変更して調整する構成とした。
(もっと読む)
コンバイン
【課題】脱穀後の排藁を別途装着した作業機にて確実に処理することができ、また、作業機に大きな負荷がかかって損傷を与えるようなことをなくしたコンバインを提供することを課題とする
【解決手段】コンバイン1に、脱穀後の排藁を処理するための作業機90(例えば、結束機90A又は集束機90B)を装着可能として、作業機90の装着状態を検知する装着状態検知手段73と、装着状態検知手段73により作業機90が装着状態であることが検知された場合に、走行速度を制限する制御手段200とを備える。
(もっと読む)
乗用型芝刈り車両
【課題】走行速度が変化した場合であっても芝刈り機の昇降位置を合わせることができ、高品質な芝の刈り取りが可能な乗用型芝刈り車両を提供する。
【解決手段】進行方向に対して車両の前後方向における異なる位置に配設された前側芝刈り機13a,13bと後側芝刈り機14とを備える乗用型芝刈り車両1であって、電動シリンダ26a,26bによって前側芝刈り機13a,13bを昇降させる第1昇降機構と、電動シリンダによって後側芝刈り機14を昇降させる第2昇降機構と、車両の走行速度を検出するためのセンサ34a〜34cと、センサ34a〜34cの検出結果に応じて、前側芝刈り機13a,13bの昇降位置と後側芝刈り機14の昇降位置とが一致するように第1,第2昇降機構を制御する制御部とを備える。
(もっと読む)
走行伝動装置の制御装置
【課題】旋回中に左右の走行装置の速度差を変更した際の違和感を低減するための走行伝動装置の制御装置を提供する。
【解決手段】制御部は、人為的に操作される操向操作部材が第1操作位置から第2操作位置に切換操作される際に、切換操作の操作量に応じてクラッチによる動力の伝達量を漸増させてクラッチを入り状態とする。また、制御部は、操向操作部材が第2操作位置から第3操作位置に操作される際には、操作量の増加に伴いクラッチによる動力の伝達量を漸減させクラッチを切り状態とするとともに、制動手段による制動力を漸増させる。ただし、制御部は、操向操作部材の切換操作の操作速度が所定速度以上であった場合には、クラッチが伝動状態となるまで動力の伝達量を漸増させた後、動力の伝達量を漸減させるとともに制動手段による制動力を漸増させる。
(もっと読む)
作業車輌の車高制御装置
【課題】車高制御上の下降限界位置の調整を容易に行えるものとする。
【解決手段】左右の走行装置と機台を左右の機台昇降シリンダ(20,21)で接近および離間するように装着し、車高制御コントローラ(14)で機台昇降シリンダ(20,21)を伸縮制御して機台の水平を維持する車高制御装置において、車高を設定する車高設定ダイヤル(4)をダイヤル表示の最下位置を越えて回すと、車高センサ(5,6)が下降限界を検出しても機台昇降シリンダ(20,21)を縮め駆動して左右の走行装置と機台が当接する機械的な下降限界位置まで機台を降下させる構成とする。
(もっと読む)
コンバイン
【課題】圃場の隅部で未刈穀稈を刈り取るコンバインの隅刈作業を行う場合、隅刈作業を自動的に行うことを可能として、操縦者の操作負担を軽減する。すなわち操縦者の操作技術に拘らず円滑な隅刈作業を行うことを可能とし、圃場の隅部での作業性を向上することが可能なコンバインを提供する。
【解決手段】コンバイン1において、圃場の隅刈りを自動的に行うモードである自動隅刈りモードを実行する手段であって、制御装置200と接続されるスタートボタン153(隅刈り操作手段)を備え、自動隅刈りモードにおいて制御装置200は、刈取部4を上昇させてから、機体を所定距離後進させて停止させ、刈取部4を下降させてから、機体を所定角度旋回させて刈り取りしながら所定距離前進させて停止させる作業動作を、設定回数行うように制御する。
(もっと読む)
コンバイン
【課題】前処理部の駆動速度を機体の走行速度に連動させて変速制御する車速連動制御と、前処理部の駆動速度を機体の走行速度に連動させて変速制御しない定速制御との切換え、または前記車速連動制御よりも前処理部の駆動速度を増速して機体の走行速度に連動させて変速制御する倒伏制御との切換えを誤操作なく行なえるように構成して操作性を向上させる。
【解決手段】前処理部7の駆動速度を機体の走行速度に連動させて変速制御する車速連動制御(標準速制御)と、該車速連動制御よりも前処理部7の駆動速度を増速して機体の走行速度に連動させて変速制御する倒伏制御との切換え、または前記車速連動制御と、前処理部7の駆動速度を機体の走行速度に連動させて変速制御しない定速制御(非車速連動制御)の切換えを、脱穀クラッチレバー21の操作によって集約的に行なえるように構成した。
(もっと読む)
ハイブリッド方式のコンバイン
【課題】刈取装置の位置エネルギーを電力に変換してバッテリに蓄えて適宜にコンバインの駆動部に設ける電動機を駆動することで、さらなる低燃費化を図る。
【解決手段】機台(3)の下部に前後にスライドするようにラック杆(56)を設け、ラック杆(56)と発電機(25)の入力軸に固着したピニオンギヤ(58)とを噛み合わせ、刈取装置(8)に設ける前ナローガイド(23)を後方へ延長する後ナローガイド(24)をラック杆(56)に連結し、刈取装置(8)の下降時の位置エネルギーでラック杆(56)を後方へスライドさせピニオンギヤ(58)を回転させて発電機(25)で発電し、発電した電力をバッテリ(29)に蓄え、この電力で機体の回転各部に適宜設ける駆動補助モータ(40)を駆動する構成とする。
(もっと読む)
コンバイン
【課題】広い圃場内に点在する手刈り穀稈やこぼれ稈等を効率よく手扱ぎすることができるコンバインを提供する。
【解決手段】脱穀クラッチが入り状態で、且つ走行機体が前進走行中にある時、アクチュエータを介して刈取クラッチを入り状態とする刈取クラッチ自動制御と、前処理部を所定の高さ以上に上昇させた時、刈取クラッチを自動的に切り状態とするオートクラッチ制御を設けると共に、該オートクラッチ制御を実行可能状態または実行不能状態に切替えるオートクラッチスイッチを長押し操作することにより、前記刈取クラッチ自動制御を解除できるように構成した。
(もっと読む)
21 - 40 / 129
[ Back to top ]