
Fターム[3D232DA04]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 操舵の状態 (8,167) | 前輪舵角 (3,968) | タイヤ舵角 (969)
Fターム[3D232DA04]の下位に属するFターム
タイロッド軸方向変位 (123)
Fターム[3D232DA04]に分類される特許
21 - 40 / 846
冗長機能付きステアバイワイヤ式操舵装置の制御装置
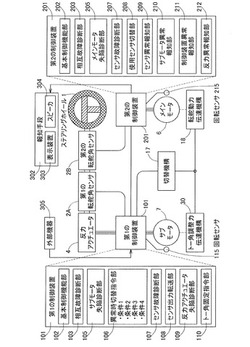
【課題】 転舵用のメインモータの失陥および制御装置の故障に対する冗長性確保のための多重化と、平常時は多重化部分を利用した高機能化を両立したステアバイワイヤ式操舵装置の制御装置を提供する。
【解決手段】 メインモータを切り離しサブモータの回転を伝えて転舵可能なフェールセーフモードとする切替機構17を有する。第1の制御装置101は、反力アクチュエータ4とサブモータ7を制御する。第2の制御装置201は、メインモータ6を駆動する。第1の制御装置101は、異常時切替指令部106を有し、メインモータ6が失陥であるとの診断結果を受けたとき、および相互故障診断部103で第2の制御装置201が故障であると診断したときに、切替機構17をフェールセーフモードとする。
(もっと読む)
インホイールモータを利用した車両制御方法

【課題】車体の安定性を確保するために、ESCシステムではなくインホイールシステムを利用することにより、車両を安定的に制御することができるインホイールモータを利用した車両制御方法を提供する。
【解決手段】操向角、ホイール速度、横加速度、ヨーレートを演算する段階、横加速度と予め設定された横加速度限界値を比較する段階、操向角、ホイール速度に基づいた運転手が要求する要求ヨーレートと車両の実測ヨーレートの差を予め設定されたヨーレートコントロール基準値と比較する段階、要求ヨーレートと実測ヨーレートの差がヨーレートコントロール基準値よりも大きい場合には、要求ヨーレートと実測ヨーレートを比較する段階、要求ヨーレートと実測ヨーレートの差によって最終トルク値を発生させる段階を含むことを特徴とする。
(もっと読む)
車両用操舵装置
【課題】ステアリングギア比を車速に応じて変化させる場合であっても、ドライバに対し、車速に関係なく適切な操舵量をイメージさせる。
【解決手段】車速Vに基づきステアリングギア比Gおよび転舵角δを算出し(ステップS1、S2)、さらに車速Vおよび操舵角θに応じた操舵反力成分T(V,θ)と、フリクション成分Tfと、操舵角速度θ′に応じた操舵反力成分T(θ′)との和から操舵反力Tを演算し(ステップS3〜S8)、操舵反力成分T(V,θ)を、車速Vが大きいときほど小さな値となる特性とする。車速Vが大きいときほど操舵反力Tは抑制されるため、ステアリングギア比を車速に応じてステアリングギア比が大きくなる特性とした場合でも、ステアリングホイール1に付与される操舵反力は車速に関係なくほぼ同等程度となる。そのためドライバは操舵量をイメージしやすくなり、的確な操舵を行うことができる。
(もっと読む)
車両用操舵装置
【課題】車両が砂利道等を走行している場合に、転舵輪の振動が操舵部材に伝達されるのを抑制できる車両用操舵装置を提供する。
【解決手段】伝達比可変装置7は、第1シャフト11および第2シャフト12を差動回転可能に連結する差動機構13と、差動機構13を駆動する伝達比変更用モータ14とを有している。伝達比変更用モータ14は、実act角演算部76によって演算された実act角θactが目標act角演算部71によって演算された目標act角θact*に等しくなるようにフィードバック制御される。外乱判定部77によって第2シャフト12に外乱が入力されていると判定されたときには、伝達比変更用モータ14のフィードバック制御に用いられる比例ゲインKPが通常よりも低減される。
(もっと読む)
ステアリング装置、産業車両およびプログラム
【課題】産業車両の発進時に運転者が意図しない方向に進んでしまうのを防止する。
【解決手段】フォークリフト1のステアリング装置5では、フォークリフト1に運転者が存在しない(S120:NO)という条件が成立した場合に、操舵輪53の舵角が基準となる基準角まで戻る復帰制御が行われる(S150〜S230)。これにより、上記条件の成立により復帰制御が行われることを知る運転者にとっては、フォークリフト1の進行方向が復帰制御により基準角に応じた方向になっていることを認識できるため、フォークリフト1の発進時に運転者が意図しない方向に進んでしまうようなことがなくなる。
(もっと読む)
操舵制御装置
【課題】小型かつ軽量で構成部材の破損を防止可能な操舵制御装置を提供する。
【解決手段】ECU40は、トルクセンサ31により検出した操舵トルクに基づき基準補助トルクを算出する。ECU40は、算出した基準補助トルクをラック6の位置に基づき補正することで補正補助トルクを算出する。具体的には、ECU40は、ラック6が移動可能範囲の一端近傍の所定の第1位置から前記一端側へ移動するに従い、または、ラック6が移動可能範囲の他端近傍の所定の第2位置から前記他端側へ移動するに従い前記基準補助トルクの値がより小さくなるよう補正することで補正補助トルクを算出する。ECU40は、ラック6の位置に基づき前記基準補助トルクまたは前記補正補助トルクのいずれかを補助トルクとして決定する。ECU40は、決定した補助トルクに基づきアクチュエータ52の駆動を制御する。
(もっと読む)
自走車両
【課題】操縦操作に基づいて制御量を生成する制御ユニットと、キャスタ輪と、制御指令により互いに独立して駆動制御される第1駆動部及び第2駆動部と、第1駆動部によって走行駆動される左駆動輪及び第2駆動部によって走行駆動される右駆動輪とを備えた自走車両において熟練を要せずに傾斜面を駆動走行しながら自在に横切ることできること。
【解決手段】傾斜横切り走行時に発生する目標走行と実走行との走行方向ずれを、車両の傾斜度に基づいて、解消するようにキャスタ輪の操向角を制御する。
(もっと読む)
操舵制御装置
【課題】小型かつ軽量で構成部材の破損を防止可能な操舵制御装置を提供する。
【解決手段】ECU40は、操舵角センサ31により検出した操舵角に基づき基準伝達比を算出する。ECU40は、算出した基準伝達比をラック6の位置に基づき補正することで補正伝達比を算出する。具体的には、ECU40は、ラック6が移動可能範囲の一端近傍の所定の第1位置から前記一端側へ移動するに従い、または、ラック6が移動可能範囲の他端近傍の所定の第2位置から前記他端側へ移動するに従い前記基準伝達比の値がより小さくなるよう補正することで補正伝達比を算出する。ECU40は、ラック6の位置に基づき前記基準伝達比または前記補正伝達比のいずれかを伝達比として決定する。ECU40は、決定した伝達比に基づき第1アクチュエータ22の駆動を制御する。
(もっと読む)
車両の位置姿勢測定装置
【課題】車両の位置姿勢を精度良く測定する車両の位置姿勢測定装置を提供する。
【解決手段】前輪を操舵する車両の位置および姿勢を検出するための車両の位置姿勢測定装置であって、ステアリング角(θ)を検出するステアリング角検出手段(1)と、車両の前後左右四輪の車輪速(PFl,PFr,PRl,PRr)を検出する車輪速検出手段(2−5)と、前記ステアリング角検出手段からの出力に基づいて実舵角(δFl,δFr)を演算する実舵角演算手段(6)と、前記実舵角と前記車輪速に基づきリアトレッドおよび後輪車輪半径のそれぞれの推定値(T†R,r†Rl,r†Rr)を演算するトレッド・車輪半径推定手段(7)と、前記推定値と後輪の前記車輪速に基づき車両の位置(x,y)および姿勢(γ)を演算する車両位置姿勢演算手段(8)と、を備え、任意の慣性座標系に対する車両の位置および姿勢を測定する。
(もっと読む)
作業車
【課題】農作業等の作業性を向上させることができる作業車を実現する。
【解決手段】電動モータの回転を制御して、ステアリングハンドルの操作量に対応するステアリング装置の入力軸の操作量の比であるステアリングレシオを変更可能な可変レシオモードと、電動モータの回転を制御して、予め設定された設定位置又は設定方向に沿って走行機体を自動操向させる直進モードとを実行可能な制御装置を備えている。
(もっと読む)
車両用操舵装置及び荷役車両
【課題】不必要な据え切り操作を極力させないように、意図的な据え切り以外の動作を抑制することにより、車両において無駄な電力消費を抑制する。
【解決手段】操舵部材と、車速を検出する車速検出部と、検出された車速が規定値よりも小さいかどうかを判定する車速判定部と、操舵部材に操舵反力を付与する反力モータと、転舵輪を転舵させる転舵駆動機構と、転舵駆動機構を駆動する転舵モータとを備える。車速判定部によって、検出された車速が規定値よりも小さいと判定された場合に、操舵部材の操舵角の増加に伴って転舵モータの通電を制限するとともに、操舵反力が急激に増大するように反力モータを制御する。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】トー角調整時に転舵軸の非回転分割軸と回転分割軸とが互いに抜けることが防げ、トー角調整用モータの消費電力量を抑えることができるステアバイワイヤ式操舵装置を提供する。
【解決手段】非回転分割軸10Aと回転分割軸10Bとがねじ結合部で互いに結合された転舵軸10を備える。両分割軸10A,10Bを一体に軸方向移動させることにより、転舵輪を転舵させる。非回転分割軸10Aに対して回転分割軸10Bを回転させて、ねじ結合部の螺合長さを調整することにより、転舵輪のトー角を変える。一方の分割軸10Aに、径方向に広がるつば部90b,90cを有する被係合部材90を設ける。他方の分割軸10Bに、ねじ結合部の螺合長さが一定長さ以下になった場合に、つば部90cに係合して螺合長さが短くなる側への両分割軸10A,10Bの相対軸方向移動を規制する係合部材91を設ける。
(もっと読む)
ステアリング制御装置
【課題】車両の走行安定性を向上させることが可能なステアリング制御装置の提供。
【解決手段】位相検出部18は、操舵輪側で発生する実舵角θbがステアリングホイール側で発生する操舵角θaに対して一方の回転方向へ先行して変化する進み位相状態であるか否かを判定し、実舵角θbが進み位相状態である場合、モータベクトル制御部17は、上記一方の回転方向に対して反対方向へ向かう制動トルクを発生させる指令信号をモータ3へ出力する。
(もっと読む)
電動パワーステアリング装置
【課題】 ブラシ付モータ20のブラシの位置ずれを検出する。
【解決手段】 位置ずれ検出部80は、モータ実電流Imとモータ端子間電圧Vmと回転角速度ωとに基づいて、モータ20の逆起電圧定数Keを計算し、そのデータ(Ke,Im)をサンプリングする(S31〜S34)。そして、電流方向別にモータ実電流Imに対する逆起電圧定数Keの特性を表す近似式を計算し(S35)、プラス方向のモータ実電流Imに対する逆起電圧定数Keの近似式の1次係数A1と、マイナス方向のモータ実電流Imに対する逆起電圧定数Keの近似式の1次係数A2のとの偏差ΔAが判定基準値Arefを超える場合に、ブラシの位置ずれが生じていると判定する(S39)。
(もっと読む)
車両用操舵装置
【課題】車線の幅変化等の状況変化があっても、車両に目標走行ラインを走行させるための適切な支援ができる車両用操舵装置を提供する。
【解決手段】操舵補助力をモータ6によって発生させる操舵補助モード、及び、走行車線を自動的に維持するための反力トルクをモータ6によって発生させる車線維持支援モードで使用可能な車両用操舵装置100であって、道路の1車線の幅及び当該幅内の自車両の位置を検知する検知装置15と、車線維持支援モードにおいて、前記幅内の目標走行ラインから前記幅の最寄りの一方の端を車両が逸脱しない位置までの距離に対して所要のトルク値が得られる反力トルクの特性を、目標走行ラインを中心線として設定し、設定した特性に基づく反力トルクを操舵機構に付与する制御装置12とを備えたものである。
(もっと読む)
ステアリング装置、産業車両およびプログラム
【課題】産業車両に搭載されるステアリング装置において、ストッパーの位置関係を調整することなく、所望の旋回半径で安定的に旋回できるようにする。
【解決手段】操舵輪の操舵角が設定操舵角に到達した以降(s230「YES」)、ステアリング51への操舵トルクが制御されることで(s240)、設定操舵角を超えるような操舵輪の操舵が制限される。「設定操舵角」は、フォークリフトを所定の旋回半径で旋回させるのに適した操舵角として、設定変更可能な値であるホイルベースに応じたものが設定されるため(s220)、フォークリフトの機種などによりホイルベースが異なる場合であっても、このホイルベースを事前に設定変更しておくことにより、ホイルベースの違いに拘わらず、所望の旋回半径で安定的に旋回できるようになる。
(もっと読む)
ステアリング制御装置
【課題】車両の発進直後のステアリング操作性を向上させる。
【解決手段】ステアリング制御装置1は、車両2の直進に対応する中立位置を含む範囲で回転操作されるステアリングホイール5に対してトルクを付与するモータ10と、ステアリングホイール5の回転操作に応じて変動する車両2の操舵角を検出する操舵角センサ11と、車両2が発進直後であるか否かを判定する発進判定部22と、車両2が発進直後であると発進判定部22が判定したとき、操舵角センサ11が検出した操舵角に基づいて、中立位置へ向かって作用する中立方向トルクのトルク量を決定し、決定したトルク量の中立方向トルクをモータ10に発生させるトルク制御部22と、を備える。
(もっと読む)
車両用操舵装置
【課題】タイヤの横力に応じた反力をドライバに返すことにより、優れた操舵フィーリングを持つ車両用操舵装置を提供する。
【解決手段】操舵トルクを検出するためのトルクセンサ13と、車速を検出するための車速センサ14と、操舵補助力を発生するための操舵補助電動モータ20と、トルクセンサ13の検出操舵トルク及び車速センサ14の検出車速とに基づいて操舵補助電動モータ20を駆動制御するEPS制御部21とを備える。EPS制御部21は、操舵トルクと車速とに基づいてタイヤの滑り角βを推定し、推定されたタイヤの滑り角βと検出車速とを用いてタイヤの横力Fを推定する。推定されたタイヤの横力Fに基づいてアシスト量を調整し、操舵補助電動モータ20を駆動する。
(もっと読む)
角度検出装置、操舵装置、作業車両、および角度検出方法
【課題】角検出精度を向上させることができる角度検出装置および角度検出方法の提供。
【解決手段】互いに位相差を有するsin信号およびcos信号を出力する角度センサと、sin、cos信号の信号変化率に基づいて、sin、cos信号の一方を選択して角度検出に用いる制御部と、を備え、制御部は、第1、第2信号の一方の信号変化率(電圧勾配)が他方の信号変化率(電圧勾配)よりも小さくなる場合に、選択される信号を前記一方から前記他方へと切り替える。このように2つの信号を選択的に用いることで、変曲点に近く分解能が悪い領域の信号値が角度検出に用いられることが回避されるので、角検出精度を向上させることができる。信号変化率の大小は、sin、cos信号の電圧に基づいて判断することができる。
(もっと読む)
車両用操舵装置およびその制御方法
【課題】ステアバイワイヤシステムを有する車両用操舵装置において、旋回制動時等の走行安定性を向上させること。
【解決手段】ステアバイワイヤシステムと、ステアリングラック部材14と車輪とを連結する転舵用リンク部材と、転舵用リンク部材と並行して設置し、車体と車輪とを車両上下方向に揺動可能に連結する懸架用リンク部材と、ステアリングラック部材14を車両前後方向に移動させるラック移動手段27a、27b、27cと、ラック移動手段27a、27b、27cによるステアリングラックの移動に応じて、入力側ステアリング軸と出力側ステアリング軸との連結状態を切り替えるクラッチ27dと、を有し、ラック移動手段27a、27b、27cが、ステアリングラック部材14を、転舵用リンク部材との連結点が懸架用リンク部材に近づく方向に移動させる車両用操舵装置とした。
(もっと読む)
21 - 40 / 846
[ Back to top ]