
Fターム[5H680FF21]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 製造、制御、電源、保護 (2,336) | 制御 (1,111)
Fターム[5H680FF21]の下位に属するFターム
Fターム[5H680FF21]に分類される特許
21 - 40 / 44
駆動装置及び撮像装置並びに携帯端末
【課題】移動体を所望の速度に調整するに際し、簡易な構成で、簡単に調整できる低コストの駆動装置を得、該駆動装置を備えることにより光学系の移動速度の安定した撮像装置及び該撮像装置を備えた携帯端末を得る。
【解決手段】電圧の印加に基づいて変位する電気機械変換素子と、移動体を摺動可能に支持し電気機械変換素子に接合されて電気機械変換素子と共に変位する軸状部材と、電気機械変換素子に接続され電圧を印加する駆動回路と、を有し、電気機械変換素子の変位により、移動体を軸状部材に沿って移動させる駆動装置において、電気機械変換素子に、駆動回路の時定数を調整する可変抵抗を直列に接続した駆動装置とする。
(もっと読む)
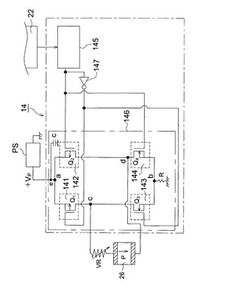
駆動装置

【課題】 駆動回路の複雑化等を招くことなく、消費電力を可及的に抑制して電池電源で有効に駆動することができるようにする。
【解決手段】 圧電素子26にその一方側から第1の極性の駆動電圧を印加して充電する第1スイッチ回路141及び第4スイッチ回路144からなる第1の駆動回路と、圧電素子26にその他方側から第1の極性とは逆極性の駆動電圧を印加して充電する第2スイッチ回路142及び第3スイッチ回路143からなる第2の駆動回路と、各駆動回路により圧電素子26に充電された電荷を抵抗を介して放電する第2スイッチ回路142及び第4スイッチ回路144からなる放電回路とを備え、第1の駆動回路と第2の駆動回路とを交互に駆動させると共に、第1の駆動回路の駆動期間と第2の駆動回路の駆動期間との間に放電回路を駆動させる。
(もっと読む)
駆動装置
【課題】ERゲル等の比較的小さな変位量を発生する受動素子を使用して、比較的大きな変位量を得ることが可能な駆動装置を提供する。
【解決手段】電界を印加したときに電界と平行な方向に収縮し且つ電界と平行な方向とは異なる方向に伸張する、複数の素子11A、11Bがアクチュエータに使用される。可動部3は、所定方向に進退可能に支持され、電界の印加およびその除去による素子の変形により移動される。素子に印加される電界は、素子を間に挟むようにして配置される複数の電極12A、12Bと、これに直流電力を供給する電源部6とにより発生される。制御部7は、所定周期で電界を間欠的に発生するように電源部6から電極12に供給される電力を制御する。
(もっと読む)
圧電アクチュエータの制御方法
【課題】圧電アクチュエータの非線形性及び変位軌跡の違いを考慮しつつ、高速演算が可能な圧電アクチュエータの制御方法を提供する。
【解決手段】圧電アクチュエータの制御方法は、圧電アクチュエータに印加された電圧V及び誘起された電荷qを入力として、圧電アクチュエータの変位x及び/又は荷重Fを推定し、推定された変位x及び/又は荷重Fに基づいて圧電アクチュエータに印加する電圧又は電荷量を設定する。ここで、この圧電アクチュエータの制御方法は、ヒステリシス関数に基づいて、変位x及び/又は荷重Fを推定する。
(もっと読む)
振動アクチュエータ及びその制御方法ならびにロボットハンド
【課題】多自由度の振動アクチュエータにおいて、可動子の蛇行を抑制するように駆動条件を設定することができる振動アクチュエータ及びその制御方法ならびにロボットハンドを提供する。
【解決手段】振動アクチュエータは、所定の試験時間中に、駆動用の交流電圧である第1駆動電圧Vd1、第2駆動電圧Vd2、および第3駆動電圧Vd3の周波数を変化させつつ、回転子6の意図した方向への移動量に関連する移動表示値と、意図しない方向への蛇行量に関連する蛇行表示値とを測定する。X軸周りの回転の場合、移動表示値は、第1電流測定値Im1および第2電流測定値Im2であり、蛇行表示値は第3電圧測定値Vm3である。そして、測定された移動表示値および蛇行表示値に基づいて交流電圧の運転用の周波数を決定する。
(もっと読む)
圧電駆動装置、圧電駆動装置の駆動方法および電子機器
【課題】電源電圧の負荷の低減と、圧電アクチュエータによる被駆動体の駆動量低下を抑制できる圧電駆動装置を提供すること。
【解決手段】圧電駆動装置は、圧電アクチュエータAと、圧電アクチュエータAで駆動される被駆動体と、被駆動体が予め設定された目標位置に移動したか否かを検出する位置検出用センサ200と、圧電アクチュエータAの駆動および位置検出用センサ200の駆動を制御する駆動制御装置100を備える。駆動制御装置100は、圧電アクチュエータAおよび位置検出用センサ200に駆動信号を交互に出力して圧電アクチュエータAに対して駆動信号を出力する期間および位置検出用センサ200に対して駆動信号を出力する期間が重ならないように制御可能に構成されている。
(もっと読む)
圧電アクチュエータ装置
【課題】間欠動作が可能な圧電アクチュエータ装置を提供する。
【解決手段】間欠指令部50は、間欠制御部51と、停止位置判定部52と、間欠タイマ53とを備えている。反転制御部46から反転指令信号が供給されると、間欠制御部51は、停止位置判定部52からの停止位置信号に基づき駆動体を間欠動作させるか判断する。駆動体を間欠動作させると判断すると、間欠制御部51は、駆動信号出力手段32に圧電素子5への電力の供給を停止させる停止信号を供給するとともに、間欠タイマ53に間欠時間のカウントを開始させる信号を供給する。間欠タイマ53は、間欠時間のカウントを完了すると、経過信号を間欠制御部51に供給する。経過信号が供給されると間欠制御部51は、反転指令信号を駆動信号出力手段32に供給し、駆動体を反転動作させる。
(もっと読む)
慣性駆動アクチュエータ
【課題】組み立てが簡単かつ位置検出精度が高い慣性駆動アクチエータを提供すること。
【解決手段】固定部材1と、振動基板3と、圧電素子2(移動手段)と、慣性により振動基板3に対して移動する第1、第2の移動体4a、4bと、第1、第2の移動体4a、4bのそれぞれの面に設けられた第1の電極41a、41bと、振動基板3の面に設けられた第2の電極31、32、33と、第1の電極41a、41bと第2の電極31、32、33との間に介在する絶縁膜10と、駆動手段6と、第1の電極41a、41bと第2の電極31、32、33の対向部分の静電容量に基づいて振動基板3に対する移動体4a、4bの位置を検出する位置検出手段7と、を備えている。
(もっと読む)
超音波モータ駆動回路及び超音波モータの駆動信号生成方法
【課題】安価な超音波モータ駆動回路を提供することである。
【解決手段】第1のD/Aコンバータ18は、デジタルデータDATA−Aをアナログ信号DAC−Aに変換して非反転増幅器20及び反転増幅器21に出力する。第1のアナログマルチプレクサ16は、矩形波Aの立ち上がりのタイミングで、第1のD/Aコンバータの出力信号と同相の信号を選択して出力し、矩形波Aの立ち下がりのタイミングで、第1のD/Aコンバータの出力信号の逆相の信号を選択して出力する。これにより、第1のD/Aコンバータ18の出力信号の正負の振幅値を持った交流信号が出力される。
(もっと読む)
駆動装置の駆動方法
【課題】駆動装置の構造の制限により電気機械変換素子の伸長時と縮小時とで振動摩擦部に速度の異なる変位が得られない場合においても、移動部を駆動すること。
【解決手段】伸縮方向で互いに対向する第1及び第2の端部を持つ電気機械変換素子と、この電気機械変換素子の第1の端部に結合された静止部材と、電気機械変換素子の第2の端部に取り付けられた振動摩擦部と、この振動摩擦部と摩擦結合される移動部とを備え、電気機械変換素子の伸縮方向に移動部が移動可能な駆動装置を駆動する場合、電気機械変換素子の伸長する速度と縮小する速度とを等しくし、静止時間を電気機械変換素子の縮小後および伸長後のいずれか一方に設ける。
(もっと読む)
ステージ機構、及びそれを備えた電子顕微鏡、並びにステージ機構の位置決め制御方法
【課題】低振動でドリフトが小さく高精度の位置決めを行える電子顕微鏡用ステージ機構を実現する。
【解決手段】ステージの駆動機構に超音波モータを用いるとともに、停止剛性を高める固定機構をモータと一体化する。すなわち、与圧機構に超音波モータと共に固定機構のピエゾ素子をマウントする構造を用い、ステージの加速減速及び位置決めを駆動機構で行った後、固定機構によりステージを固定する際、ステージの両側に位置するピエゾ素子が伸長し、ステージを押圧するように構成する。
(もっと読む)
圧電アクチュエータ、圧電アクチュエータの駆動制御方法、および電子機器
【課題】駆動制御を容易に実施できる圧電アクチュエータの提供。
【解決手段】圧電アクチュエータ20は、第1、第2振動領域R1,R2に入力する駆動信号D1,D2の位相差(駆動位相差)の正負の切替により、ロータを正方向および逆方向の両方に駆動可能であり、第1振動領域R1および第2振動領域R2のうち少なくとも位相遅れ駆動信号が供給される方に設けられた検出電極(261または262)により振動状態が検出され、この振動信号(S1またはS2)の駆動信号D1に対する位相差(検出位相差)を基に駆動制御されているので、単調増加または単調減少となる位相差特性を得ることができる。この検出位相差を駆動制御の設定値として駆動制御できるため、複雑なアルゴリズムを必要としないので回路規模が大きくならず、駆動信号の周波数制御を容易に実施することができる。
(もっと読む)
駆動制御装置及び駆動制御方法
【課題】被駆動部材を位置決め動作開始基準位置へ移動させる際の補正を行い、より高い精度の駆動制御を行う。
【解決手段】所定方向に沿った圧電素子12の伸び速度と縮み速度とを異ならせるよう駆動パルスの供給を制御して圧電素子12を伸縮させることで駆動棒17を振動させ、駆動棒17に摩擦係合したレンズ21を所定方向に沿った双方向に移動させる駆動制御装置20において、レンズ21の焦点合わせ動作の開始位置についての補正量に対応する予め調整された補正駆動パルス数を記憶したEEPROM36と、レンズ21の焦点合わせ動作前に補正駆動パルス数を読み出す読出し手段33と、該補正駆動パルス数に基づいて、レンズ21を上記開始位置へ移動させるための駆動パルス数を補正する補正手段34と、補正後の駆動パルス数に応じた駆動パルスを圧電素子12へ供給する移動制御手段31とを備える。
(もっと読む)
磁歪アクチュエータ
【課題】磁歪アクチュエータを作動する際に発生するコイルのジュール熱や磁歪素子の渦電流損失による発熱を起因とした磁歪素子の熱膨張変形を解消するとともに、可動部材と固定部材との非接触駆動が可能でありスムーズで応答性の良い制御を可能とした磁歪アクチュエータを提供する。
【解決手段】磁歪素子2と可動軸7からなる変位発生手段と、該変位発生手段に磁界を印加するためのコイル3とコイルボビン4と永久磁石5からなる磁界印加手段と、前記変位発生手段と前記磁界印加手段を収納するケーシング1と、該ケーシングの少なくとも一部が前記変位発生手段とともに閉磁気回路を構成する磁気回路機構とを具備した磁歪アクチュエータにおいて、前記可動軸7を囲繞するケーシング1との間にリング状間隙10を設け、該ケーシング1に前記リング状間隙10へ開口する流体孔を設けて流体軸受を形成した。
(もっと読む)
振動型アクチュエータの駆動装置、及び駆動方法
【課題】 振動型アクチュエータを低速回転域から高速回転域まで駆動制御する場合に、各種の不具合の発生を可及的に防止し得る振動型アクチュエータの駆動装置、駆動方法を提供する。
【解決手段】 超音波モータの目標速度が低速で、超音波モータを低速回転させる場合は、デジタル的に駆動パルスを生成するレートマルチプライアー方式による駆動制御、及び間歇駆動制御を行う。一方、超音波モータの目標速度が高速で、超音波モータを高速回転させる場合は、アナログ的に駆動パルスを生成するVCO方式による駆動制御、及び連続駆動制御を行う。
(もっと読む)
圧電アクチュエータを作動させる方法と装置
圧電アクチュエータ(1)の少なくとも1つの制御パラメータを考慮して、圧電アクチュエータ(1)を充電または放電するための第1の電気的な量をクロック制御式に供給することによって、第1の作動モード(B1)において前記圧電アクチュエータ(1)が駆動制御され、圧電アクチュエータ(1)を充電または放電するための第1の電気的な量、しかも圧電アクチュエータ(1)における負荷変化に実質的に依存しない第1の電気的な量の所定の経過を非クロック制御式に印加することによって、第2の作動モード(B2)において圧電アクチュエータ(1)が駆動制御され、第1の電気的な量の所定の経過が印加されている間の少なくとも1つの測定時間中に、圧電アクチュエータ(1)の第2の電気的な量の経過が検出され、第2の電気的な量の検出された経過に依存して、圧電アクチュエータ(1)の少なくとも1つの制御パラメータ(P)が求められる。  (もっと読む)
(もっと読む)
駆動装置および駆動システム
【課題】十分な低速駆動および駆動速度の滑らかな変更が可能な駆動技術を提供する。
【解決手段】駆動装置では、圧電素子の伸縮動作に連動し往復動する駆動軸に摩擦力で係合する駆動ユニットの駆動を行える。この駆動装置においては、圧電素子に印加する電圧を最大値(+Vp)→中間値1(0V)→最小値(−Vp)→中間値2(0V)と繰り返す際には、中間値1の電圧を印加する時間(第2期間tc)と中間値2の電圧を印加する時間(第4期間td)とを相補的に増減することにより最大値と最小値との電圧印加タイミングをずらせるとともに最大値・最小値の電圧を印加する時間(第1期間tbおよび第3期間ta)を相補的に変化させることで駆動ユニットの駆動速度を変更する。これにより、駆動ユニットについての十分な低速駆動および駆動速度の滑らかな変更が可能となる。
(もっと読む)
超音波モータの駆動方法及びその装置
【課題】 安定した駆動及び駆動音の低減を図ることのできる超音波モータの駆動方法及びその装置を提供することを目的とする。
【解決手段】 超音波振動子2に駆動交番信号を印加することにより、超音波振動子2に異なる2つの振動モードを同時に発生させ、超音波振動子2の摩擦接触子10に略楕円振動を生じさせて、超音波振動子2と超音波振動子2に接触する被駆動体3とを相対的に移動させる超音波モータ1の駆動方法において、駆動交番信号を印加する本振動領域の前に、摩擦接触子10に該略楕円振動よりも小さい予備振動を発生させる。
(もっと読む)
リニアモータ
【課題】 駆動点の押圧方向振動成分と進行方向振動成分の変位と振動速度を別々に制御することを可能にし、駆動点の押圧方向振動と進行方向振動の共振周波数の縮退や各種寸法の調整等を不要にすることができる超音波モータを利用したリニアモータ提供すること。
【解決手段】 固定子と、固定子に対して移動可能に設置された可動子と、固定子と可動子の間に設置され、振動体の両面又は片面に圧電材料を貼り付けてなる、又は圧電材料自身が振動体として機能するように構成され、超音波振動することにより可動子を移動させる超音波モータとを具備してなるリニアモータにおいて、超音波モータを直交する二つの非軸対称振動を利用する構成としたもの。
(もっと読む)
超音波モータ
【課題】 駆動点の垂直方向成分と進行方向成分の変位と振動速度を別々に制御することを可能にする超音波モータを提供すること。
【解決手段】 摩擦接触面を押す方向に変位する押圧方向振動成分用圧電材料と、上記押圧方向振動成分用圧電材料とは別に配置され進行方向に変位する進行方向振動成分圧電材料と、を具備し、それによって、超音波モータの摩擦接触面を押す方向に変位する振動成分と、超音波モータの進行方向に変位する振動成分を別々に励振することが可能となる。
(もっと読む)
21 - 40 / 44
[ Back to top ]