
Fターム[3D232EC22]の内容
走行状態に応じる操向制御 (73,124) | 制御対象(制御機構) (6,276) | 電動機式制御装置 (3,850) | 電動機 (3,326)
Fターム[3D232EC22]の下位に属するFターム
供給電流調整 (1,707)
供給電圧調整 (279)
正負(方向)決定手段 (19)
絶対値決定手段 (3)
Fターム[3D232EC22]に分類される特許
41 - 60 / 1,318
車両の操舵支援装置及び操舵支援方法
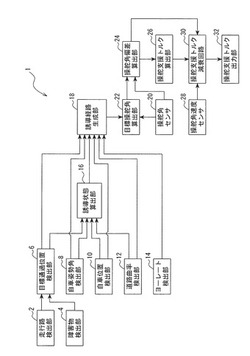
【課題】操舵支援トルクの急激な変化や断続的な変化を抑制することが可能な、車両の操舵支援装置及び操舵支援方法を提供する。
【解決手段】走行路における目標通過位置へ到達するまでに自車両が目標とする姿勢角及び横位置を算出する誘導状態算出部16と、誘導状態算出部16が算出した姿勢角及び横位置と、自車両の現在の姿勢角、横位置及びヨーレートに基づき、誘導経路を生成する誘導経路生成部18と、誘導経路を自車両が走行するための目標操舵角を算出する目標操舵角算出部22と、現在操舵角を検出する操舵角センサ20と、目標操舵角と現在操舵角との差分である操舵角偏差を算出する操舵角偏差算出部24と、操舵角偏差を縮小させるための操舵支援トルクを算出する操舵支援トルク算出部26と、操舵支援トルクを操舵輪へ出力する操舵支援トルク出力部32を備える。
(もっと読む)
農業用トラクタ

【課題】農業用トラクタにおいて、操舵トルクセンサが故障しても確実に操舵力補助制御を継続できるようにする。
【解決手段】農業用トラクタは、エンジンが搭載され且つ前後四輪にて支持された走行機体と、走行機体に設けられた操縦ハンドルと、電動モータ84を有する電動操舵機構と、操縦ハンドルの操舵トルクを検出する操舵トルクセンサ85とを備える。操舵トルクセンサ85の検出結果に基づき電動モータ84の出力を増減させ、電動操舵機構を介して左右両前車輪を操舵する。走行機体の前後方向の傾斜角を検出するピッチングセンサ104を備える。ピッチングセンサ104の検出結果に基づき電動モータ84の出力を調節可能に構成する。
(もっと読む)
制御装置、リーチ式フォークリフトおよびプログラム
【課題】運転者に違和感を与えたり危険を及ぼしたりする可能性のある状態であることを、事前に運転者へ通知できるようにする。
【解決手段】操舵モードをロックモードへと切り替えるための操作が運転者により行われた際(s120「YES」)、操舵輪53の操舵角がロック角以上になっていると、切替条件が満たされていないとしてロックモードへの切替を保留するとともに(s130「NO」)、切替条件が満たされていないことを通知することができる(s140)。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】高い静粛性を確保しつつ、より安定的にレゾルバレス制御を実行することのできるモータ制御装置を提供すること。
【解決手段】F/B制御部47は、F/Bゲイン可変制御部80が演算するフィードバックゲインを用いて、トルク偏差Δτに基づくトルクフィードバック制御を実行することにより第1変化成分dθτを演算する。また、F/Bゲイン可変制御部80は、第1変化成分dθτを加算角θaとする「第1の演算モード」、及び第1変化成分dθτを推定モータ回転角速度ωm_eにより補正した値を加算角θaとする「第2の演算モード」の各演算モードに応じて、二種類の異なるフィードバックゲインK1,K2を演算する。そして、第1の演算モードに用いるフィードバックゲインK1は、第2の演算モードに用いるフィードバックゲインK2との比較において、より応答性が高くなるように設定される。
(もっと読む)
モータ制御装置及びこれを備える電動パワーステアリング装置。
【課題】三相ブラシレスモータを二相駆動する際に効率よく駆動電圧をモータの正常相に印加することのできるモータ制御装置及びこれを備える電動パワーステアリング装置を提供する。
【解決手段】信号出力部は正常相を二相駆動するに際し、ロータの回転に伴って各正常相に発生する誘起電圧と相似する正弦波の駆動電圧を誘起電圧に追従する態様で各正常相に対し印加すべく制御信号の生成態様を変更する制御信号変更処理を実行する。
(もっと読む)
操舵反力生成装置、車両及び操舵反力生成方法
【課題】基準ラック軸力をより高精度に推定すること。
【解決手段】基準ラック軸力演算部15Bの車体持ち上げエネルギ演算部15aは、操舵角に基づき、転舵されることにより発生する車体1Aの上下方向の変位による車体持ち上げエネルギを算出し、タイヤ摩擦エネルギ演算部15bは、操舵角に基づき、転舵によってそれら転舵輪と走行路面との間に発生する摩擦によるねじりトルクを算出し、セルフアライニングエネルギ演算部15cは、操舵角及び車速に基づき、セルフアライニングトルクを算出し、加算部15dは、車体持ち上げエネルギ、ねじりトルク、セルフアライニングトルクを加算して総エネルギ量を求め、ラック軸力演算部15eは総エネルギ量とラックストローク量とに基づき基準ラック軸力を推定する。
(もっと読む)
操舵補助制御装置
【課題】操舵補助制御実行中における運転者の適正な関わりを検出するとともに、運転者の操舵補助制御に対する監視放棄を抑制することのできる操舵補助制御装置を提供すること。
【解決手段】操舵補助制御中の第1所定時間経過後に(S1)、アシストトルクを通常の操舵補助制御に基づく目標アシストトルクから運転監視確認用アシストトルクに調整し(S2〜S4)、所定期間内に運転者の反応が検出されなかった場合には(S5、S7)、運転者への警告を発するとともに操舵補助制御を停止する(S8)。
(もっと読む)
油圧式パワーステアリング装置
【課題】油圧制御バルブの開度が急変して作動油の圧力が低下した場合に、パワーシリンダへの作動油の供給量が低下するのを抑制できる油圧式パワーステアリング装を提供する。
【解決手段】ポンプ回転数補正部63は、バルブ開度指令微分値演算部71と、ポンプ回転数補正値演算部72と、補正値加算部73とを含んでいる。バルブ開度指令微分値演算部71は、バルブ開度指令値設定部52によって設定されるバルブ開度指令値θB*の時間微分値(バルブ開度指令微分値)を演算する。ポンプ回転数補正値演算部72は、バルブ開度指令微分値に基づいて、ポンプ回転数指令値VP*の補正値(ポンプ回転数補正値)を演算する。補正値加算部73は、ポンプ回転数補正値を、ポンプ回転数指令値設定部62によって設定されたポンプ回転数指令値VP*に加算する。
(もっと読む)
モータ制御装置
【課題】電流検出回路に故障が発生した場合でも、モータ制御の正常な動作を維持することができるモータ制御装置を提供する。
【解決手段】モータ制御装置は、インバータ回路1と、シャント抵抗Rsに流れるモータ電流を検出する第1電流検出回路10および第2電流検出回路20と、電流検出回路10、20の出力に基づいてモータ電流の検出値を算出するとともに、目標値のモータ電流を流すための指令値をPWM回路2へ出力する制御部3とを備える。第1電流検出回路10は正の第1ゲインを有し、第2電流検出回路20は第1ゲインを反転した負の第2ゲインを有する。制御部3は、第1電流検出回路10の出力に基づき算出した第1検出値と、第2電流検出回路20の出力に基づき算出した第2検出値とを用いて、電流検出回路の異常有無と、いずれの電流検出回路が異常であるかの判定を行い、正常な電流検出回路の検出値に基づいてモータ制御を行う。
(もっと読む)
冗長機能付きステアバイワイヤ式操舵装置の制御装置
【課題】 転舵用のメインモータの失陥および制御装置の故障に対する冗長性確保のための多重化と、平常時は多重化部分を利用した高機能化を両立したステアバイワイヤ式操舵装置の制御装置を提供する。
【解決手段】 メインモータを切り離しサブモータの回転を伝えて転舵可能なフェールセーフモードとする切替機構17を有する。第1の制御装置101は、反力アクチュエータ4とサブモータ7を制御する。第2の制御装置201は、メインモータ6を駆動する。第1の制御装置101は、異常時切替指令部106を有し、メインモータ6が失陥であるとの診断結果を受けたとき、および相互故障診断部103で第2の制御装置201が故障であると診断したときに、切替機構17をフェールセーフモードとする。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】 トー角制御用モータの小型化を図り消費電力の増加を抑え、また車両の停止時に、トー角を制御するとき運転者に違和感を与えないステアバイワイヤ式操舵装置を提供する。
【解決手段】 ステアリング制御手段8aは、車両の停車時に、トー角を変える指令信号を出力する場合にトー角を変える回転分割軸6B側の操舵輪3を、この操舵輪3が接地する地面に対して方向が変化しないように、トー角調整用モータ13と転舵用モータ11とを協調して制御する協調制御部8adを有する。
(もっと読む)
ウォーム減速機
【課題】ウォームとウォームホイールとの噛み合い部分での歯打ち音の発生を抑制しつつ、円滑に動作させることができるウォーム減速機を提供する。
【解決手段】ウォームホイール17は、転がり軸受22を介して、コラムシャフトの軸方向中間部(メイン軸)20に一体回転可能でかつ軸方向移動を規制されて結合されている。ウォームホイールの内径側であるメイン軸20から径方向にアーム23が延出し、その先端はウォームホイール17(外径側)内に形成された空間部25に挿入されている。空間部25には、粘性流体26が充填されており、この空間部25とアーム23とで緩衝器24が形成され周方向に作動する。
(もっと読む)
車体傾動制御装置、車体傾動制御方法
【課題】車体を旋回内側に傾動させるときの旋回性能を改善することである。
【解決手段】旋回走行時に車体をロール方向に沿って旋回内側に傾斜させる目標対地傾斜角φ*を設定し、設定した目標対地傾斜角φ*に応じて、駆動モータ3を駆動制御する。そして、車体の目標ヨーレートγ*を設定し、目標ヨーレートγ*及び車体のロール方向に沿った旋回内側への傾斜角に応じて、車体のヨーレートを制御する。具体的には、操舵角及び車速に応じて、車体の目標ヨーレートγ*を設定し、車体をロール方向に沿って旋回内側に傾斜させるときのキャンバスラストに起因したヨー運動分に相当するキャンバスラスト分補償量δcを算出する。そして、目標ヨーレートγ*及びキャンバスラスト分補償量δcに応じて、車体のヨーレートを制御する。
(もっと読む)
舵角比可変操舵装置
【課題】応答性が良くて剛性感のある良好な操舵フィーリングを得ることができる舵角比可変操舵装置を提供する。
【解決手段】舵角比可変機構15は、操舵部材とトーションバーを介して連結された入力軸と、転舵機構に連結された出力軸を接続する。操舵部材の操作に基づく第1舵角にVGRモータ21の駆動に基づく第2舵角θtmを上乗せすることにより、舵角比を可変する。VGR制御部16が、操舵角θs や車速Vに基づいて演算された基礎成分θtmk * に、ねじれ角センサにより検出された、トーションバーのねじれ角δに基づいて演算された補償成分θtmh * を重畳することにより、第2舵角の制御目標値δtm* を演算する。
(もっと読む)
電動パワーステアリング装置
【課題】ステアリングホイールの中点を正確に設定することで、その中点からの操舵量に応じた制御の適正化を図ることができる電動パワーステアリング装置を提供する。
【解決手段】変量検出部は、ヨーレートセンサを含む複数の変量検出部の検出値の絶対値が所定の範囲内にあり、かつ、ヨーレートセンサの検出値の今回値の絶対値が前回値の絶対値より小さいということを学習条件とする。そして、上記学習条件を満たすときに、その時点の検出操舵量を設定中点とする。
(もっと読む)
障害物検出装置及び車両制御装置
【課題】障害物の検出精度を向上させることが可能な障害物検出装置を提供する。
【解決手段】障害物検出装置100は、障害物6を検出する検出領域Cを、車両1の進行方向A1に設定する検出領域設定部53と、検出領域C内に位置する障害物6を検出する情報取得装置3及び判断部55と、車両1における操舵操作の操舵方向aを検出する操舵方向検出装置4と、を備え、検出領域設定部53は、検出領域Cにおいて、操舵方向aに対して反対方向に位置する反対部分C2を、車幅方向外側に向って拡大する。
(もっと読む)
操舵装置及び操舵制御装置
【課題】操舵フィーリングを向上させることができる操舵装置及び操舵制御装置を提供することを目的とする。
【解決手段】車両に設けられ操舵操作が可能である操舵部材5と、操舵部材5に対する操舵操作を補助するアクチュエータ9と、アクチュエータ9を制御し、操舵部材5の中立位置側からの切り込み操作に対応した当該操舵部材5の中立位置側への切り戻し操作を補助する戻し操作補助制御を実行可能であり、切り込み操作の際の操舵部材5の操舵量に応じて、当該戻し操作補助制御を実行する際の切り戻し操作時間を決定する操舵制御装置11とを備えることを特徴とするので、操舵フィーリングを向上させることができる。
(もっと読む)
モータ制御装置及び車両用操舵装置
【課題】モータの駆動時においても、相開放スイッチのオープン故障を検出することのできるモータ制御装置及び車両用操舵装置を提供する。
【解決手段】異常検出部は、モータ21と駆動回路32との間で一方向への通電が可能、且つモータ21が高速回転していない状態で、判定対象となる特定相の相誘起電圧値が継続して異常判定閾値以下となった場合に、該特定相のリレーFETにオープン故障が発生したと判定するようにした。
(もっと読む)
電動パワーステアリング装置
【課題】ステアリングホイールの中点を正確に設定することで、その中点からの操舵量に応じた制御の適正化を図ることができる電動パワーステアリング装置を提供する。
【解決手段】変量検出部は、複数種類の変量をそれぞれ検出する複数種類の変量検出手段を備え、制御部は、それぞれの検出値の絶対値が所定の範囲内にあり、かつ、それぞれの検出値の今回値の絶対値が前回値の絶対値より小さいことを学習条件とする。そして、上記学習条件を満たすときに、その時点の検出操舵量を設定中点とする。
(もっと読む)
車両用操舵装置
【課題】三相ブラシレスモータの駆動回路内の1つのスイッチング素子が短絡故障した場合に、短絡故障が発生したスイッチング素子を特定することが可能となる車両用操舵装置を提供する。
【解決手段】短絡故障したFETがローサイドFETであると特定された場合には、運転者による操舵が行なわれたときに、三相の各相の相電圧最大値を検出し、検出された各相の相電圧最大値を比較することにより、短絡故障相を特定する。一方、短絡故障したFETがハイサイドFETであると特定された場合には、運転者による操舵が行なわれたときに、三相の各相の相電圧最小値を検出し、検出された各相の相電圧最小値を比較することにより、短絡故障相を特定する。
(もっと読む)
41 - 60 / 1,318
[ Back to top ]