
Fターム[3D232EC22]の内容
走行状態に応じる操向制御 (73,124) | 制御対象(制御機構) (6,276) | 電動機式制御装置 (3,850) | 電動機 (3,326)
Fターム[3D232EC22]の下位に属するFターム
供給電流調整 (1,707)
供給電圧調整 (279)
正負(方向)決定手段 (19)
絶対値決定手段 (3)
Fターム[3D232EC22]に分類される特許
101 - 120 / 1,318
電動パワーステアリング装置
【課題】システムを大型化することなく、すえ切り時において操舵補助力が不足しないコンパクトな構造の電動パワーステアリング装置を提供する。
【解決手段】操舵系に連結され、前記操舵系に減速機を介して操舵補助トルクを発生するモータ18を備え、操舵系の操舵トルクや車速に基づき前記モータを制御し、操舵アシストトルクを発生する電動パワーステアリング装置において、前記減速機を減速比の異なる第1減速機18b、20と第2変速機18c、21で構成し、この第1、第2減速機18b、20、18c、21を切替える切替手段13を備えた。
(もっと読む)
車両の走行制御装置

【課題】車両挙動が安定した状態で且つドライバに違和感、不快感又は不安感を与えることなく軌跡制御を開始又は再開する。
【解決手段】車両の軌跡を該車両の運転者による操舵入力と無関係に変化させることが可能な軌跡可変装置を備えた車両における走行制御装置は、前記車両の軌跡が目標軌跡となるように前記軌跡可変装置を制御する軌跡制御手段と、前記車両の操舵速度を検出する操舵速度検出手段と、前記検出された操舵速度が、基準時間以上の期間について基準速度以下である場合において、前記軌跡制御手段による前記目標軌跡に応じた軌跡制御の実行を許可する許可手段と、車速が高い程低くなるように前記基準速度を設定すると共に車速が高い程長くなるように前記基準時間を設定する設定手段とを具備する。
(もっと読む)
作業車両
【課題】作業車両の傾斜地での直進走行性能を向上できるようにする。
【解決手段】左右の走行駆動輪11・12と、左右の走行駆動輪11・12の前方または後方に配置される補助輪(キャスタ輪13・14)と、前記左右の走行駆動輪11・12をそれぞれ回転駆動する左右一対の電動モータ15・16と、左右の走行駆動輪11・12の回転速度をそれぞれ検出する回転速度検出手段(回転速度センサ17・18)と、進行方向及び車速を設定する操行手段となる旋回レバー21・22と、作業車両に発生するヨーレイトを検出するヨーレイトセンサ25と、前記操行手段より算出された目標ヨーレイトになるように前記左右電動モータ15・16の回転数を変速してヨー制御する制御装置50を備える作業車両において、操行手段で設定した進行方向が設定角度以内の直進走行の場合のみ、ヨー制御を行うようにした。
(もっと読む)
操舵力制御装置
【課題】最小限の構成による簡素な構成で、車両姿勢が不安定となったときに適切に操舵補助力を付加し、ステアリング操作による車両の姿勢の安定化を促進させることのできる操舵力制御装置を提供すること。
【解決手段】電動パワーステアリング(10)を備えた車両(1)において、前輪(2L,2R)の左右車輪速差、または後輪(4L,4R)の左右車輪速差が所定車輪速差αより大、または当該左右車輪速差の変化率が所定変化率βより大であるような場合に(S3)、所定時間の間(S9)低車輪速側に操舵補助力を付加する。
(もっと読む)
車両運動制御装置及びプログラム
【課題】簡単な構成のマップを用いて、設定されたジャークに従って車体合成力を増減させながら所望の位置へ到達する際の縦移動距離を最小化する車体合成力を導出する。
【解決手段】所望の横移動距離Ye、速度の方向、現時刻の車体合成力の大きさF0、及び車体合成加速度の大きさの時間変化(ジャーク)KJを設定し、自車両の速度のx成分vx0、y成分vy0、Ye、F0/m、及びKJを用いた各々異なる3つのパラメータを演算し、3つのパラメータと、所望の位置へ到達する際の縦移動距離を最小化する車体合成力を求めるための第1の導入パラメータη1の特定仮定下での値η1’との関係、第2の導入パラメータη2の特定仮定下での値η2’との関係、回避時間teの特定仮定下での値te’との関係を定めた3次元マップを用いて、KJに従って車体合成力を増減させながら所望の位置へ到達する際の縦移動距離を最小化する車体合成力を導出する。
(もっと読む)
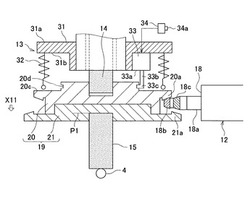
車両用操舵装置および車両用操舵装置の製造方法
【課題】ハウジング内で転舵軸の移動量を規制することができ、しかも小型で強度に優れた車両用操舵装置を提供する。
【解決手段】電動モータ21,22の回転動力をボールねじ機構23を介して転舵軸6の軸方向X1の移動に変換する、ステアバイワイヤ式の車両用操舵装置1である。転舵軸6の移動方向に応じて、転舵軸6の中間部のねじ軸32の両端の当接部45,46が、ロータ26内を挿通して、対応するストッパ47,48に当接することにより、転舵軸6の移動量を規制する。ストッパ47,48をハウジングとは別部材の強度の強い材料で構成する。
(もっと読む)
車両の走行制御装置
【課題】車両の旋回走行時に、転舵機構を駆動するアクチュエータ系に失陥が生じる場合であっても、適切な走行制御を維持する。
【解決手段】走行制御装置は、前輪FL、FR及び後輪RL、RRの舵角を制御可能な転舵機構15、18を有する車両10の装置であって、転舵機構を駆動させる第1転舵手段400、500、600及び第2転舵手段300、310、320、330と、第1及び第2転舵手段が転舵機構を駆動させる際の動作の態様を制御する制御手段100と、第1転舵手段において失陥が生じたことを検出する検出手段410、510、610とを備え、制御手段は、第1転舵手段に失陥が生じた場合、車両の運動状態に対応する状態量が、第2転舵手段の動作により適用可能な範囲内で設定する目標状態量となるように、第2転舵手段を動作させる。
(もっと読む)
車両の走行制御装置
【課題】ドライバ操舵との干渉による違和感を緩和しつつ、操舵入力情報を検出するデバイスの機能失陥時においても好適な軌跡追従性を確保する。
【解決手段】車両の走行制御装置は、車両の軌跡が目標路に近付くように舵角可変手段を制御する軌跡制御手段と、車両の運転者によりハンドルを介して操舵入力軸に与えられる操舵入力に関する操舵入力情報を取得する取得手段と、取得された操舵入力情報に応じて軌跡制御手段による軌跡制御の応答性を変更すると共に、操舵入力が取得出来ない場合に軌跡制御の応答性を向上させる応答性変更手段とを具備する。
(もっと読む)
電動パワーステアリング装置
【課題】テアリングホイールの中立位置近傍における路面からの外乱に対して、ヨー応答性を抑制するとともに、運転者のステアリング操作時のヨー応答性は良好なものとする電動パワーステアリング装置を提供する。
【解決手段】テアリングホイールから転舵輪に至る操舵力伝達経路に磁歪式トルクセンサを配置し、磁歪式トルクセンサで検出した操舵トルクに応じてステアリングアクチュエータを駆動して運転者のステアリング操作をアシストする電動パワーステアリング装置において、ステアリングホイール及び転舵輪間に配置されるステアリングギヤボックスを、磁歪式トルクセンサよりもバネ定数が小さいゴムブッシュ42を介して車体に支持する。ゴムブッシュ42は、その外周部のラック軸方向の周方向領域に一対のすぐり部42a,42aを有している。
(もっと読む)
車両用操舵装置
【課題】操舵用の電動モータのフェール時にも、転舵輪の向きを容易に変位することのできる車両用操舵装置を提供する。
【解決手段】電動モータ21,22のロータ31,41によって駆動されるボールナット48と、転舵軸6に設けられボールナット48にねじ結合されたねじ軸47とを含むボールねじ機構23が設けられている。転舵軸6の回転は、第1規制機構60によって規制されている。ねじ部材58は、ブッシュ26から取り外すことが可能である。ねじ部材58は、ハウジング5の第2雌ねじ部63およびロータ31の第2挿通孔64を挿通することにより、ロータ31,41の回転を規制する。このとき、ブッシュ26を回転させることにより、転舵軸6は、ボールナット48に対して回転しながら、軸方向X1に変位し、転舵輪の向きが変わる。
(もっと読む)
トルクセンサ及びこれを備えた電動パワーステアリング装置
【課題】温度変化などによるドリフトの影響を完全に除去することができるトルクセンサ及びこれを備えた電動パワーステアリング装置を提供する。
【解決手段】回転軸に生じるトルクに応じて互いに逆方向にインピーダンスが変化する2対の検出コイル13a〜13dを軸方向に配列したトルク検出部10と、前記2対の検出コイルのうち軸方向の両端側の2つの検出コイル13a,13dとこれらに直列に接続した抵抗体とで構成される第1のブリッジ回路210Aと、前記2対の検出コイルのうち軸方向の中央側の2つの検出コイル13b,13cとこれらに直列に接続した抵抗体とで構成される第2のブリッジ回路210Bと、前記第1のブリッジ回路210A及び第2のブリッジ回路210Bに個別に交流信号を印加したときの差分信号に基づいて少なくとも2組の検出トルクを演算するトルク演算部21A,21Bとを備えている。
(もっと読む)
電動パワーステアリング装置
【課題】モータ駆動回路のMOS−FETの保護手段が異常となっても、モータ駆動回路のMOS−FETの動作を確実に停止できる電動パワーステアリング装置を提供する。
【解決手段】モータ駆動中にトランジスタ31の出力の短絡故障が検出されると、マイコン5はイネーブル信号ENBをオフし、FET20がオフ状態となることによって、モータ駆動回路7のMOS−FET(U2)のゲートがプリドライバ6のモータ駆動信号から遮断される。同時に、MOS−FET(U2)のゲート電荷は抵抗32,30,トランジスタ31のコレクタ−エミッタを通して放電されることによってゲート電圧が低下し、MOS−FET(U2)を短時間でオフできる
(もっと読む)
測定された操舵角度に対して、決定された操舵角度を調整する方法およびデバイス
【課題】操舵システムのモータ回転子により連続的に決定される第1操舵角度を、ステアリングホイール付近に配置された操舵角センサによって連続的に測定される第2操舵角度に対して同期して調整する方法を提供する。
【解決手段】第1操舵角度LW*の第1時間プロファイルIが連続的に監視される工程と、第2操舵角度LW#の第2時間プロファイルIIが連続的に監視される工程と、第2操舵角度LW#に対する第1操舵角度LW*の調整がまだ実行されていない場合に、第1操舵角度LW*が第2操舵角度LW#の現在の値に設定される工程110と、第2操舵角度LW#に対する第1操舵角度LW*の少なくとも1回の調整が既に前もって実行されている場合であって、第1プロファイルIにおける符号の変化が生じている場合に、第1操舵角度LW*が、第2プロファイルIIにおいて生じるヒステリシスの関数として決定される工程120;140とを有する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】演算負荷の増加を抑えつつ、インバータ出力の高い状態においても、精度良く、検出される各相電流値に基づいて異常検出を行うことのできるモータ制御装置を提供すること。
【解決手段】異常検出部は、所定数αの電流検出周期に亘って、検出された各相電流値Ix(x=u,v,w)をその電流検出周期毎に記憶する(Ix_1,…,Ix_n、但し、「n」は自然数)。そして、当該所定数αの電流検出周期が経過した後、まとめて、その記憶領域に記憶した各相電流値Ix_1,…,Ix_nについて、三相(U,V,W)の総和に基づく異常判定をまとめて実行する。
(もっと読む)
車両の操舵制御装置
【課題】 トルクセンサを構成する複数のセンサの異常をそれぞれ正確に判別し、正常なセンサによる検出値を用いてアシストトルクを付与する車両の操舵制御装置を提供すること。
【解決手段】 電子制御ユニット28は、2つの磁気センサ24A,24Bのいずれかに異常が発生し、トルクセンサ20全体として異常が発生しているときには異常の発生している磁気センサを特定する。すなわち、ユニット28は、センサ24A,24Bからそれぞれ磁束密度の変化に起因して検出される回転トルクT1,T2を出力させるためにEPSモータ13を駆動させて出力側シャフト12a2に付与する回転トルクを変動させる。そして、ユニット28は、出力されたトルクT1,T2と判定トルクTrefとを比較して異常の発生している磁気センサを特定し、正常な磁気センサが検出した回転トルクを用いてアシストトルクを付与する。
(もっと読む)
操舵反力制御装置
【課題】運転者の状態に応じたより適切な補助反力をステアリングに付与可能とする操舵反力制御装置を提供する。
【解決手段】操舵反力制御は、運転者の疲労状態及びステアリングホイールの把持位置などの運転者の把持姿勢に応じて、ステアリングに付加する補助トルクを補正する。補助トルクは、例えば操舵トルクや操舵フリクションである。例えば反力装置コントローラ6は、検出する運転者の把持位置がステアリングホイール7の中心に対して上側に位置していると判定しているときに、運転者が疲労状態になったと推定すると、疲労状態でないと推定した場合に比べて、補助トルクを増大補正する。
(もっと読む)
ステアバイワイヤシステム
【課題】ステアバイワイヤシステムにおいて、ステアリングホイールの手応え感を最適に調整することにある。
【解決手段】反力発生モータ制御手段24は、異常検出手段24Bを備えるとともに、ステアリングホイール7の操作角を検出する操作角検出手段10,12に連絡し、異常検出手段24Bにより反力発生が停止する異常状態が検出されている時には操作角検出手段10,12により検出されるステアリングホイール操作角に基づいて反力発生モータ13の端子13A,13B間を断続的に短絡させる。
(もっと読む)
モータ制御装置及びそれを用いた電動パワーステアリング装置
【課題】コンパクト化、軽量化及びコストダウンを図った上で電流検出可能となるDuty範囲を最大限とした、単一の電流センサで構成されるモータ制御装置、及びそれを用いた電動パワーステアリング装置を提供する。
【解決手段】制御演算によりモータの電流を制御するための各相Duty指令値を算出し、各相Duty指令値に応じたPWM波形を形成し、PWM波形に基づいてインバータによりモータを駆動するモータ制御装置において、インバータの電源入力側又は電源出力側に単一の電流検出器を接続し、各相Duty指令値の差を保持したまま一律増減させるDutyシフト機能と、各相PWM信号の出力位置を決定するPWM出力位置変更機能を備え、1相のみ、又は2相同時に、PWM信号がONとなるタイミングをPWM周期の固定位置に発生させ、モータ電流を検出する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】駆動回路を構成する各スイッチング素子に生じた短絡異常と区別して、精度良くセンサ異常の発生を検出することのできるモータ制御装置を提供すること。
【解決手段】異常検出部は、検出される山読み電流値Ix_hpの絶対値及び各谷読み電流値Ix_lpの絶対値の少なくとも何れかが、その電流検出の限界値に対応して設定された第1の閾値I1を超えるか否かを判定する。また、異常検出部は、その検出される相電流値Ixの絶対値が「0(ゼロ)」に対応して設定された第2の閾値I2よりも小さいか否かを判定する。そして、これら二つの判定条件を共に満たす相がある場合には、当該相にセンサ異常(張り付き異常)が発生したものと判定する。
(もっと読む)
車両制御装置
【課題】 特定の制御デバイスに可動範囲を超えて負荷が集中することがないよう、制御量を適切に設定する。
【解決手段】 本発明の車両制御装置(1)は、車両(10)の挙動を制御する複数のアクチュエータ(300、400、500、800)と、車両の目標運動状態に対応する目標状態量を設定し、車両の運動状態に対応する状態量が目標状態量となるようにアクチュエータの夫々の制御量を算出する制御量算出手段(100)と、複数のアクチュエータの夫々について重み係数を設定する係数設定手段(100)と、複数のアクチュエータの夫々の制御量に対して重み係数を適用した値に基づく評価関数を算出する評価関数算出手段(100)と、評価関数が所定の条件を満たす制御量を複数のアクチュエータの夫々の最適制御量として用いて、複数のアクチュエータを動作させるアクチュエータ制御手段(100)とを備える。
(もっと読む)
101 - 120 / 1,318
[ Back to top ]