
Fターム[3D232EC22]の内容
走行状態に応じる操向制御 (73,124) | 制御対象(制御機構) (6,276) | 電動機式制御装置 (3,850) | 電動機 (3,326)
Fターム[3D232EC22]の下位に属するFターム
供給電流調整 (1,707)
供給電圧調整 (279)
正負(方向)決定手段 (19)
絶対値決定手段 (3)
Fターム[3D232EC22]に分類される特許
21 - 40 / 1,318
車線逸脱防止制御装置
【課題】突発的な外乱が生じた場合であっても車線逸脱を防止できる車線逸脱防止制御装置を提供する。
【解決手段】自車両の走行車線からの逸脱を防止するように操舵機構に操舵力を付与する車線逸脱防止制御装置を、自車両の横速度を検出する横速度検出手段と、走行車線からの逸脱を防止する方向へ目標横位置と自車両の横位置との偏差に応じて該偏差が大きくなる程大きい変化量で増加する操舵力を設定する操舵力設定手段と、横速度の増加に応じて走行車線からの逸脱を防止する方向への操舵力を増加補正する操舵力補正手段と、操舵力補正手段によって補正された操舵力に基づいて操舵機構に操舵力を付与する操舵力制御手段とを備える構成とする。
(もっと読む)
車両制御システム

【課題】車両の挙動を安定させること。
【解決手段】車両10の旋回状態量に基づいた前輪Wfl,Wfrの転舵角又は前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御により車両10の挙動制御を行う車両制御システムにおいて、旋回走行中で且つ前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角が制御されており、更に車両10の旋回状態が所定よりも大きい高G旋回領域にある場合に、前記前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御における後輪Wrl,Wrrの転舵角制御の介入度合いを減少させる又は当該後輪Wrl,Wrrの転舵角制御を停止させること。
(もっと読む)
車両用制御装置
【課題】駆動システムの未始動時においても、車両ずり下がりを防止するための十分な制動力を発生させることができるとともに、十分な操舵アシスト力を発生させることができる車両用制御装置を提供する。
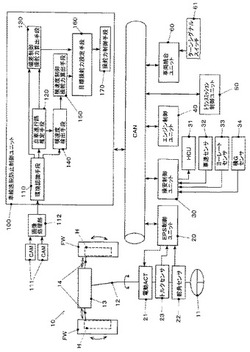
【解決手段】ハイブリッド車両に搭載される車両用制御装置であって、ハイブリッドシステムの始動および未始動を検出するHVECUを備え、HVECUが、ハイブリッドシステムの未始動時(ステップS1)に、シフトポジションセンサによりPレンジ以外のシフトレンジが検出され、かつ車速Vが発生したこと(ステップS2)を条件として、主バッテリと高圧回路とが電気的に接続されるようシステムメインリレーを制御する。
(もっと読む)
制御装置およびフォークリフト
【課題】装置構成の大型化およびコスト増加を抑えつつ、意図しない旋回を防止できるようにする。
【解決手段】検出ヨーレートが想定ヨーレートの所定範囲外となるような場合に(s160)、検出ヨーレートの作用による本体2の旋回を相殺する方向へ駆動輪53を操舵させるべく操舵トルクを付与しているため(s180)、これにより検出ヨーレートが想定ヨーレートに近い値となる結果、意図しない旋回を防止することができる。このとき、検出ヨーレートを、実際のステアリング51の操作に応じたヨーレートである想定ヨーレートと所定範囲以内に近似させることにより、効果的に意図しない旋回が防止される。
(もっと読む)
車両用走行支援装置
【課題】 車線逸脱の抑制とドライバに与える違和感の軽減との両立を図ることができる車両用走行支援装置を提供する。
【解決手段】 走行路上の自車前方に、車速Vに応じた前方注視点距離Lsだけ離れた目標走行位置Pを設定し、自車が設定した目標走行位置Pを走行するように自車の走行を支援する車両用走行支援装置において、走行路に対する自車の向きを判定する姿勢判定部14aと、自車が走行路外側を向いている場合、自車の向きが走行路と平行である場合よりも車速Vに応じた前方注視点距離のベース値Ls_baseを短縮した前方注視点距離Lsを設定する前方注視点距離設定部14と、を備えた。
(もっと読む)
走行制御装置および車両
【課題】車両の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体の衝突回避を行うことができる走行制御装置および車両を提供すること。
【解決手段】車両1の進路方向における仮想バンパー領域71を広く設定する。これにより、車両1の進行先にある物体80との衝突回避を確実に行うことができる。一方、車両1の進行方向とは異なる方向においては、仮想バンパー領域71が車両1の進行方向と比して相対的に狭く設定されるので、車両1の進行方向とは関係のない場所にある物体との衝突回避動作を抑制できる。よって、車両1の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体80の衝突回避を行うことができる。
(もっと読む)
車両用走行制御装置
【課題】車線追従制御中、運転者が車線中央寄りに向かうことを目的として操舵操作の介入を行った場合に、運転者の操舵操作の負担を軽減することができる車両用走行制御装置を提供する。
【解決手段】車線追従制御手段(目標横位置設定部)は、運転者の車線中央lmへの復帰意図があると判定されると目標横位置Y*を車線中央lmに設定し、車線中央復帰意図判定手段(車線中央復帰意図判定部)は、運転者の操舵方向が車線の外側から中央lm側へ向かう方向であり、かつ、検出される操舵状態量(操舵トルクT)が第1の閾値よりも大きい第2の閾値(閾値T2)を越えたとき、または、検出される車両運動状態量(ヨーレートψ'、車速V)から推定される自車両MCの予想軌跡Sにおける所定の前方到達点(予想到達点)SPが車線中央lmを越えたとき、運転者の車線中央lmへの復帰意図があると判定する。
(もっと読む)
ステアバイワイヤ式操舵機構の制御装置
【課題】 車両運動モデルを導入した複雑な制御系を構築することなく、路面左右の摩擦係数の違いや横風等に対する外乱安定化制御を簡単に実現する。
【解決手段】 舵角指令の主な値となるフィードフォワード値を生成するフィードフォワード値生成手段21と、外乱補正用のフィードバックによる補正量を生成する外乱補正量生成手段22と、前記フィードフォワード値と補正量とを加算して前記転舵モータ15を駆動する舵角指令を生成する比較手段23とを有する。外乱補正量生成手段22は、車両速度とハンドル角から、車両20に生じる横加速度を演算し、外乱検出手段25による横加速度の実測値が目標値に追従するように前記補正量を演算する。
(もっと読む)
操舵制御装置
【課題】操舵制御装置において、車両が路面の轍や落下物を通過して車両の進路に影響するような外乱が入ったとしても、車両の安定性を確保して直進を継続しやすくすることにある。
【解決手段】操舵用制御手段(12)は、判定手段(12A)により運転者が操舵ハンドル(6)を握っていないと判定された時に、操舵ハンドル(6)をセンター位置に維持するように操作力軽減アクチュエータ(10)の作動を制御する制御信号をアクチュエータ制御手段(11)に出力する。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】スタックの解消に対してより高く貢献することのできる電動パワーステアリング装置の制御装置を提供する。
【解決手段】電動パワーステアリング装置の制御装置は、アシストモータの電流制御により転舵輪の転舵角θtを変更する自動操舵制御を行なう。そして、自動操舵制御により転舵輪のグリップが発生した転舵角θtを検出する。
(もっと読む)
走行車両
【課題】旋回後の進入位置合わせを行える自動走行制御機能を備えた農業用の走行車両を提供すること。
【解決手段】ステアリングハンドルに連動して正転と逆転をするステアリングシャフト15の切れ角を検出する切れ角センサ49と該シャフト15に回転駆動力を伝達するための正逆転モータ20とモータ20の回転駆動力をシャフト15に伝達するための電磁クラッチ22を有する連動機構を備えた自動操舵装置25とカメラ53で圃場内の遠目標X及び/又は作業軌跡Tを検出してモニタ47に表示可能とし、自動スイッチの「入」操作時時に、前記切れ角センサ49が所定量のシャフト切れ角を検出して車両の旋回が行われたと判断されると、モニタ47で表示される旋回後の遠目標Xの位置情報及び/又は作業軌跡Tの位置情報に基づき自動操舵装置25のモータ20を作動させて圃場内で直進走行の自動操舵を行う制御構成を有する制御装置100を備えた走行車両である。
(もっと読む)
路面摩擦係数推定装置及び方法
【課題】タイヤすべり角に対するコーナーリングフォースの傾きが路面摩擦係数の関数となることを利用して、路面摩擦係数を推定する。
【解決手段】タイヤの横滑り角βとコーナーリングフォースCFを算出し、前記算出されたタイヤの横滑り角βとコーナーリングフォースCFとの比ΔCF/Δβに基づいて、路面の摩擦係数を推定する路面摩擦係数推定部28を備える。前記路面摩擦係数推定部28は、路面摩擦係数μが異なる複数の路面を走行してタイヤの横滑り角βとコーナーリングフォースCFとを検出してそれらの関係を数値で若しくは数式化してメモリ29に保存しており、前記メモリ29に保存された関係を用いて、実際の走行時に路面の摩擦係数を算出する。
(もっと読む)
車両用転舵装置とその装置を用いた車両の駐車方法及び車両
【課題】駐車用の制動装置を設けることなく、車両駐車時に車輪をロック状態に維持できるようにする。
【解決手段】各操舵輪15に車輪の舵角を変える転舵アクチュエータ10を備えるとともに、そのアクチュエータ10の舵角を独立して制御する転舵制御手段11を備える。そして、前記制御手段11が操舵輪15の転舵アクチュエータ10を制御して、駐車の際、前記車輪15を車両の左右方向に向ける。こうすることで、転舵させた車輪と路面との間に摩擦を生じさせて車輪をロックし、車両を制動することにより、駐車用の制動装置を設けることなく、車両駐車時に車輪をロック状態に維持できるようにする。
(もっと読む)
車両のパワーステアリング制御装置
【課題】特に、中立位置からのステアリングホイールの切り出しにおいて、ドライバが感じるフリクション感を適切に打ち消して滑らかで良好な操舵フィーリングを実現する。
【解決手段】車速Vと操舵トルクTsを基に基本アシストトルクTbを設定し、ハンドル角の絶対値|θH|が高いほど操舵する方向への基本アシストトルクTbを増大させる方向に補正する第1の補正値ΔT1を設定し、ハンドル角速度の絶対値|dθH/dt|が高いほど操舵する方向への基本アシストトルクTbを減少させる方向に補正する第2の補正値ΔT2を設定し、少なくともステアリングホイールの中立位置からの切り始めにおいて第1の補正値ΔT1と第2の補正値ΔT2との差を第1の補正値ΔT1で補正する方向におけるアシスト補正量ΔTaとして算出し、こうして求めたアシスト補正量ΔTaで基本アシストトルクTbを補正して制御量としてモータ駆動部21に出力する。
(もっと読む)
後輪操舵車両
【課題】後輪トー角可変制御装置を備えた車両において、後輪を操舵しても操舵フィーリングを悪化させないパワーステアリング装着車両を提供する。
【解決手段】後輪操舵式の自動車1において、左右の前輪4L,4Rを転舵するステアリングホイール11と、ステアリングホイール11の作動に応じて左右の前輪の転舵をアシストするEPSトルクを付与する電動パワーステアリング装置16と、左右の後輪6R,6Lに対して設けられた左右の伸縮アクチュエータ21L,21Rを個別に駆動制御することにより、左右の後輪6のトー角を前輪4の操舵方向と同相または逆相あるいはトーインまたはトーアウトに変化させる後輪トー角可変制御装置20とを備え、電動パワーステアリング装置16は、左右の後輪6のトー角に応じてEPSトルクを増減させるように構成する。
(もっと読む)
電動パワーステアリング制御装置
【課題】高次の車輪回転振動を抑制して操舵フィーリングを向上させる
【解決手段】電動パワーステアリングシステム1は、振動抑制補償量演算部22が、電動パワーステアリングシステム1における路面反力に対するモータ6の速度の特性について、基本アシスト量を振動抑制補償量で補正せずにモータ6を駆動させた場合の特性よりも、タイヤ10が1秒間で回転する回転数と一致する周波数(以下、基本車輪速周波数という)の1,2,3,4,5倍に一致する周波数で大きさが振動する路面反力に対してモータの速度が抑制された特性となる仕様を満たすように振動抑制補償量を演算する。これにより、上記仕様を満たすように、ハンドル2の操作を補助するためのアシスト操舵力を制御するため、基本車輪速周波数の2,3,4,5倍に一致する高次車輪速周波数を有する車輪回転振動がタイヤ10からハンドル2に伝達されるのを抑制することができる。
(もっと読む)
車線逸脱防止装置
【課題】運転者への車線逸脱の報知と逸脱防止トルクの付与とを両立して、より確実に車両の走行車線からの逸脱を防止することが出来る車線逸脱防止装置を提供する。
【解決手段】本発明による車線逸脱防止装置(1)は、車両の走行車線からの逸脱を予測し又は逸脱を検出する車線逸脱検出手段(26)と、車両の走行車線に対する逸脱方向を検出する逸脱方向検出手段(26)と、車両のステアリング(2)に左右方向の振動トルクを与える振動トルク付与手段(8)と、を有し、振動トルク付与手段は、車両の走行車線からの逸脱が検出され又は逸脱が予測されるとき、ステアリングにそのときの舵角を中立位置とする左右方向の振動トルクを付与すると共に、検出された逸脱方向と反対方向側の振動トルクの付与時間を逸脱方向側の振動トルクの付与時間より長く付与する。
(もっと読む)
車両姿勢制御装置
【課題】タイヤのグリップ状態およびスリップ状態の双方において、車両仕様の変更による影響を受けることなく、目標方向に対する車両の進行方向のずれを小さくすることのできる車両姿勢制御装置を提供する
【解決手段】ヨーレートセンサの出力を「実ヨーレートγ」とし、車両1の左右中心軸C上に存在する任意の基準点において、進行方向DFが車両1の左右中心軸Cのうち基準点よりも前方の部分に対してなす角を「車体すべり角β」とし、目標方向BFが車両1の左右中心軸Cのうち基準点よりも前方の部分に対してなす角を「目標すべり角β*」とし、目標すべり角β*と車体すべり角βとの差(β*−β)を「角度差Δβ」とする。所定の目標方向BFに対する車両1の進行方向DFの角度を制御するために、車両姿勢制御装置は、角度差Δβの符号と実ヨーレートγの符号との関係に応じて車両1の前輪31,32および後輪33,34の少なくとも一方を制御する。
(もっと読む)
車両の操舵抵抗付与装置
【課題】操舵の切り始めと戻し始めの微小操舵域において良好な操舵感が得られるとともに、ステアリングの剛性感を高めて高速走行時の安心感の向上を図ることができる車両の操舵抵抗付与装置を提供すること。
【解決手段】筒状のステアリングコラム1内に挿通する回転可能なステアリングシャフト2の回転に抵抗力を付与する抵抗付与手段5を設け、該抵抗付与手段5によって付与される抵抗力を車速に応じて変更する車両の操舵抵抗付与装置において、前記抵抗付与手段5をステアリングホイール4の近傍に配置するとともに、操舵角に基づいて算出される操舵速度の変化によってステアリングの切り始めを検知し、ステアリングの切り始め領域において前記抵抗付与手段5によって付与される抵抗力を他の領域において付与される抵抗力よりも大きく設定する。
(もっと読む)
電動パワーステアリング装置
【課題】車輪回転速度が設計的に持つ誤差に起因するセルフアライニングトルクの誤推定による制御異常出力を防止することができる電動パワーステアリング装置を提供する。
【解決手段】操舵トルク検出手段で検出した操舵トルクに基づいて第1のトルク指令値を演算する第1のトルク指令値演算手段31と、車輪回転速度に基づいて第2のトルク指令値を演算する第2のトルク指令値演算手段32と、操舵トルクの異常を検出したときに、第1のトルク指令値に代えて第2のトルク指令値をモータ制御手段に出力する異常時切換手段34と備えている。第2のトルク指令値演算手段32は、車輪回転速度に基づいて推定したセルフアライニングトルク推定値に不感帯を設定し、不感帯反映後のセルフアライニングトルクに基づいて第2のトルク指令値を演算する。
(もっと読む)
21 - 40 / 1,318
[ Back to top ]