
Fターム[3D232EC22]の内容
走行状態に応じる操向制御 (73,124) | 制御対象(制御機構) (6,276) | 電動機式制御装置 (3,850) | 電動機 (3,326)
Fターム[3D232EC22]の下位に属するFターム
供給電流調整 (1,707)
供給電圧調整 (279)
正負(方向)決定手段 (19)
絶対値決定手段 (3)
Fターム[3D232EC22]に分類される特許
61 - 80 / 1,318
パワーステアリング装置
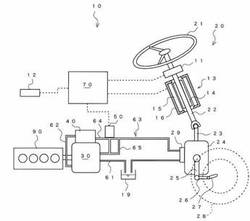
【課題】パワーステアリング装置に関し、運転者の操舵感を効果的に維持する。
【解決手段】ステアリングシャフト22から伝達される回転トルクにアシストトルクを付与可能なモータ13と、操舵状態を検出する操舵角センサ11、車速センサ12と、可変容量形ポンプ30から供給される作動油の流量を制御する作動油流量制御部と、作動油流量制御部による制御量に基づいて作動油の流量を推定する作動油流量推定部と、推定された作動油流量が下限閾値以下の場合にアシスト力を演算する操舵アシスト力演算部と、演算された操舵アシスト力に基づいてモータ13の駆動を制御するモータ駆動制御部とを備えた。
(もっと読む)
電動パワーステアリング装置

【課題】開閉手段の作動音をユーザに聞こえ難くすることができる技術を提供する。
【解決手段】ドアを有する乗り物の進行方向を変えるためのステアリングホイールの操作に対するアシスト力を付与する電動モータと、電動モータに流れる電流を通電/遮断するべく電動モータに流れる電流の経路を開閉するリレーと、リレーの作動を制御するリレー作動部と、を備え、リレー作動部は、乗り物のドアの開閉音と重なるように開閉手段を作動させる。
(もっと読む)
車両用路面反力推定装置
【課題】本発明は、路面からステアリングラックにかかる力を精度良く推定可能とすることを目的としている。
【解決手段】このため、車速検出手段と、ハンドル切れ角検出手段と、車速検出手段の車速とハンドル切れ角検出手段のハンドル切れ角とを用いてセルフアライニングトルクを算出するセルフアライニングトルク算出手段と、路面反力推定手段を備える車両用路面反力推定装置において、車速に基づいて変換係数を設定する変換係数算出手段と、セルフアライニングトルク算出手段のセルフアライニングトルクの単位時間当たりの変化量を算出するセルフアライニングトルク変化量算出手段を備え、路面反力推定手段は、セルフアライニングトルク算出手段のセルフアライニングトルクと変換係数算出手段の変換係数とセルフアライニングトルク変化量算出手段のセルフアライニングトルク変化量とドライフリクション値と粘性摩擦係数とに基づいて路面反力を推定する。
(もっと読む)
ステアリング装置、産業車両およびプログラム
【課題】産業車両の発進時に運転者が意図しない方向に進んでしまうのを防止する。
【解決手段】フォークリフト1のステアリング装置5では、フォークリフト1に運転者が存在しない(S120:NO)という条件が成立した場合に、操舵輪53の舵角が基準となる基準角まで戻る復帰制御が行われる(S150〜S230)。これにより、上記条件の成立により復帰制御が行われることを知る運転者にとっては、フォークリフト1の進行方向が復帰制御により基準角に応じた方向になっていることを認識できるため、フォークリフト1の発進時に運転者が意図しない方向に進んでしまうようなことがなくなる。
(もっと読む)
操舵制御装置
【課題】小型かつ軽量で構成部材の破損を防止可能な操舵制御装置を提供する。
【解決手段】ECU40は、操舵角センサ31により検出した操舵角に基づき基準伝達比を算出する。ECU40は、算出した基準伝達比をラック6の位置に基づき補正することで補正伝達比を算出する。具体的には、ECU40は、ラック6が移動可能範囲の一端近傍の所定の第1位置から前記一端側へ移動するに従い、または、ラック6が移動可能範囲の他端近傍の所定の第2位置から前記他端側へ移動するに従い前記基準伝達比の値がより小さくなるよう補正することで補正伝達比を算出する。ECU40は、ラック6の位置に基づき前記基準伝達比または前記補正伝達比のいずれかを伝達比として決定する。ECU40は、決定した伝達比に基づき第1アクチュエータ22の駆動を制御する。
(もっと読む)
伝達比可変装置
【課題】ロック作動時の瞬間的な衝撃力に対する耐滑り性を向上させるとともに、差動機構の異常時における操舵性能を維持することのできる伝達比可変装置を提供する。
【解決手段】ロック装置は、外周面に係合爪60が係合可能な補助係合溝が形成された補助ロックホルダ101を備え、同補助ロックホルダ101をモータ軸の軸方向においてロックホルダ53と並置するとともに、モータ軸に対して相対回転不能に固定した。また、ロックアーム54を、係合溝及び補助係合溝に係合可能な第1係合位置と係合溝のみに係合可能な第2係合位置との間で移動可能に設けた。そして、駆動機構55は、モータ軸の回転を拘束するロック作動時において、ロックアーム54が第1係合位置にある状態でモータ軸の回転を拘束した後、該ロックアーム54を第2係合位置に移動させるようにした。
(もっと読む)
モータ駆動装置、およびこれを用いた電動パワーステアリング装置
【課題】 製造時に電流制限値マップを作成するための工数を少なくし、かつ実使用時に電流制限値を変更可能なモータ駆動装置を提供する。
【解決手段】 スイッチング素子の電流制限値を変更する場合、素子温度Tが時刻t1での素子温度T1から第1目標温度T01まで変化するのに必要な温度到達時間P1、および電流制限値Eが時刻t1での電流制限値E1から第1目標電流制限値E01まで変化するのに必要な電流到達時間P2が算出される(S103)。次に、温度到達時間P1と電流到達時間P2との大小を判定する。(S104)温度到達時間P1が電流到達時間P2以下の場合、スイッチング素子の電流制限値を変更する。(S105)これにより、モータ駆動装置の製造時に電流制限値マップを作成することなく、時刻t1での素子温度T1に基づいて、スイッチング素子の状態に応じた電流制限値に変更することができる。
(もっと読む)
パワーステアリング装置
【課題】コストの高騰を抑制しつつも転舵輪の舵角を検出することのできるパワーステアリング装置を提供する。
【解決手段】ステアリングホイール側ピニオン軸2に設けられた出力側レゾルバ7の軸倍角をk1とし、モータ側ピニオン軸に設けられたモータ側レゾルバ13の軸倍角をk2とし、モータ側ピニオン軸を一回転させたときにラック軸3を介して上記ステアリングホイール側ピニオン軸2が回転する回転角度をθa°とした場合に、(θa/k2)>(360/k1)であって、且つ(θa/k2)/(360/k1)が整数でない値となるように設定する。これにより、出力側レゾルバ出力信号S2の値とモータ側レゾルバ出力信号S3の値との組み合わせが、異なる舵角で同一の値をとることがなくなり、両レゾルバ出力信号S2,S3から舵角を導出することが可能となる。
(もっと読む)
電動パワーステアリング装置
【課題】トルクセンサの異常時においても、継続して安定したステアリング操作を行なうことのできる電動パワーステアリング装置を提供すること。
【解決手段】操舵トルクセンサの異常が検出された場合には、操舵トルクセンサに替えて、横G及びヨーレートから演算される軸力に基づくアシスト力目標値に相当するモータトルクを発生させ、駆動電力の供給を実行することによりアシスト制御を継続する。その結果、横G及びヨーレートから演算される軸力に基づくアシスト力目標値を発生させているので、路面状況の変化等を運転者に十分伝えることができ、操舵フィーリングの向上が図れる。
(もっと読む)
作業車
【課題】農作業等の作業性を向上させることができる作業車を実現する。
【解決手段】電動モータの回転を制御して、ステアリングハンドルの操作量に対応するステアリング装置の入力軸の操作量の比であるステアリングレシオを変更可能な可変レシオモードと、電動モータの回転を制御して、予め設定された設定位置又は設定方向に沿って走行機体を自動操向させる直進モードとを実行可能な制御装置を備えている。
(もっと読む)
車両用操舵装置、操舵力推定装置、操舵制御方法および操舵力推定方法
【課題】車両用操舵装置において、操舵トルクあるいはラック軸力をより高精度に推定できるようにする。
【解決手段】車速を検出する車速検出手段14と、ステアリング軸3に入力した操舵操作における操舵角を検出する操舵角検出手段4と、ステアリング軸3に入力した操舵操作に対し、操舵補助力の付与あるいは操向輪9FR、9FLの操舵角制御を行う電動モータ5と、ステアリング軸3の回転を操向輪に伝達するステアリングラック部材7と、操向輪9FR、9FLの操舵において発生する路面と操向輪9FR、9FLとの摩擦エネルギを算出する摩擦エネルギ算出手段と、摩擦エネルギと操舵角とに基づいて操舵トルクあるいはステアリングラック部材7のラック軸力を推定する操舵力推定手段と、操舵力推定手段が推定した操舵トルクあるいはラック軸力に応じて、電動モータ5の駆動制御を行うモータ制御手段とを備える車両用操舵装置とした。
(もっと読む)
車両用操舵装置および操舵制御方法
【課題】ステアバイワイヤシステムにおいて付与する操舵反力をより適切なものとすること。
【解決手段】操向輪9FR、9FLの操舵において発生する路面と操向輪9FR、9FLとの摩擦エネルギを算出する摩擦エネルギ算出手段と、摩擦エネルギと操舵角とに基づいて操舵トルクあるいはステアリングラック部材7のラック軸力を推定する操舵力推定手段と、操舵力推定手段が推定した操舵トルクあるいはラック軸力に応じて、ステアバイワイヤシステムにおける操舵反力用モータ5aの駆動制御を行う操舵反力用モータ制御手段とを有する車両用操舵装置とした。
(もっと読む)
車両統合制御装置
【課題】左右輪差動制限機構の作動に伴う操舵トルク変化を精度よく抑制し、運転者のステアリング操作時の違和感を解消し、走破性と安定性とを両立させる。
【解決手段】電子制御式の左右輪差動制限機構81の拘束トルク制御量に比例して拘束トルク比例制御手段201が操舵力制御機構へ出力させる付加トルクと、操舵反力フィードバック制御手段204が操舵力制御機構へ出力させる、演算した操舵系反力を打ち消す方向の付加トルクとの割合を、前記左右前輪の回転速度差に応じて切り替える第1の前輪左右速差補正係数規定手段202、第2の前輪左右速差補正係数規定手段205、第1の乗算処理手段203、第2の乗算処理手段206および加算手段207とを備える。
(もっと読む)
電動パワーステアリング装置
【課題】操舵系にアシスト力を付与するモータについて、その抵抗値を精確に算出することのできる電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、電流値Imおよび電圧値Vmに基づいて外乱オブザーバにより推定誘起電圧EXaを算出する。そして、推定誘起電圧EXaが所定範囲内にあるとき電流値Imおよび電圧値Vmに基づいて抵抗値を算出する。さらに、最後に取得した電圧値Vmよりも前に取得した電圧値Vm(過去電圧値)および最後に取得した電流値Imよりも前に取得した電流値Im(過去電流値)に基づいて外乱オブザーバの演算式を補正する。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】トー角調整時に転舵軸の非回転分割軸と回転分割軸とが互いに抜けることが防げ、トー角調整用モータの消費電力量を抑えることができるステアバイワイヤ式操舵装置を提供する。
【解決手段】非回転分割軸10Aと回転分割軸10Bとがねじ結合部で互いに結合された転舵軸10を備える。両分割軸10A,10Bを一体に軸方向移動させることにより、転舵輪を転舵させる。非回転分割軸10Aに対して回転分割軸10Bを回転させて、ねじ結合部の螺合長さを調整することにより、転舵輪のトー角を変える。一方の分割軸10Aに、径方向に広がるつば部90b,90cを有する被係合部材90を設ける。他方の分割軸10Bに、ねじ結合部の螺合長さが一定長さ以下になった場合に、つば部90cに係合して螺合長さが短くなる側への両分割軸10A,10Bの相対軸方向移動を規制する係合部材91を設ける。
(もっと読む)
ステアリング制御装置
【課題】車両の走行安定性を向上させることが可能なステアリング制御装置の提供。
【解決手段】位相検出部18は、操舵輪側で発生する実舵角θbがステアリングホイール側で発生する操舵角θaに対して一方の回転方向へ先行して変化する進み位相状態であるか否かを判定し、実舵角θbが進み位相状態である場合、モータベクトル制御部17は、上記一方の回転方向に対して反対方向へ向かう制動トルクを発生させる指令信号をモータ3へ出力する。
(もっと読む)
ステアリング装置、産業車両およびプログラム
【課題】産業車両に搭載されるステアリング装置において、ストッパーの位置関係を調整することなく、所望の旋回半径で安定的に旋回できるようにする。
【解決手段】操舵輪の操舵角が設定操舵角に到達した以降(s230「YES」)、ステアリング51への操舵トルクが制御されることで(s240)、設定操舵角を超えるような操舵輪の操舵が制限される。「設定操舵角」は、フォークリフトを所定の旋回半径で旋回させるのに適した操舵角として、設定変更可能な値であるホイルベースに応じたものが設定されるため(s220)、フォークリフトの機種などによりホイルベースが異なる場合であっても、このホイルベースを事前に設定変更しておくことにより、ホイルベースの違いに拘わらず、所望の旋回半径で安定的に旋回できるようになる。
(もっと読む)
車両の挙動制御装置
【課題】自動操舵制御からドライバ操舵への切り替え時における違和感の発生を防止する。
【解決手段】ドライバの操舵から独立して車両状態量を変化させることが可能な少なくとも一つの装置を備えた車両において、車両の挙動制御装置は、前記少なくとも一つの装置のうちの少なくとも一つである対象装置を介して、前記車両状態量を目標状態量に収束させるための自動操舵制御を実行する自動操舵制御実行手段と、ハンドル角を検出するハンドル角検出手段と、前記自動操舵制御がドライバの操舵に応じたドライバ操舵へ切り替わる場合に、前記ドライバ操舵において前記ハンドル角と相関する一の前記車両状態量について、前記自動操舵制御により生じた第1状態量と、前記検出されたハンドル角に対し生じるべき第2状態量とが一致するように、前記少なくとも一つの装置を制御する状態量一致化手段とを具備する。
(もっと読む)
車両用操舵装置
【課題】車線の幅変化等の状況変化があっても、車両に目標走行ラインを走行させるための適切な支援ができる車両用操舵装置を提供する。
【解決手段】操舵補助力をモータ6によって発生させる操舵補助モード、及び、走行車線を自動的に維持するための反力トルクをモータ6によって発生させる車線維持支援モードで使用可能な車両用操舵装置100であって、道路の1車線の幅及び当該幅内の自車両の位置を検知する検知装置15と、車線維持支援モードにおいて、前記幅内の目標走行ラインから前記幅の最寄りの一方の端を車両が逸脱しない位置までの距離に対して所要のトルク値が得られる反力トルクの特性を、目標走行ラインを中心線として設定し、設定した特性に基づく反力トルクを操舵機構に付与する制御装置12とを備えたものである。
(もっと読む)
走行支援装置及び方法
【課題】運転者の意図によって1次操舵後に2次操舵を行う場合に、不要な支援を低減する技術を提供する。
【解決手段】車輌の走行可能な走路からの車輌逸脱時に、車輌を前記走路内で走行させるように警告又は補助の支援を行う走行支援装置であって、1次操舵量が前記支援を停止するか否かの閾値となる第1所定量を超えたことにより、前記支援を停止しているときに、さらに2次操舵量が前記支援の停止を延長するか否かの閾値となる第2所定量を超える場合には、前記支援の停止を延長する。
(もっと読む)
61 - 80 / 1,318
[ Back to top ]