
Fターム[3C007AS01]の内容
マニピュレータ、ロボット (46,145) | 用途 (2,903) | 搬送、移載、物品供給、取出 (637)
Fターム[3C007AS01]の下位に属するFターム
パレタイズ、デパレタイズ (36)
ストアへの収納取り出し (70)
多数のワークの中からの取り出し (96)
工作機械/処理装置への受け渡し (178)
Fターム[3C007AS01]に分類される特許
121 - 140 / 257
作業対象物の配置決定方法、作業対象物の配置決定支援装置、作業対象物の配置決定支援プログラム及びロボットシステム

【課題】ロボットアームの移動時間を短くすることのできる最適な作業対象物の配置位置の決定を支援する技術を提供する。
【解決手段】水平多関節ロボットのロボットアームにより搬送される作業対象物の配置決定方法であって、作業対象物の配置候補位置を複数指定する工程と、所定の位置と複数の配置候補位置のそれぞれとを通過するロボットアーム移動経路をそれぞれ指定する工程と、各ロボットアーム移動経路のそれぞれにおけるロボットアームの移動をシミュレーションし、その移動の際のロボットアームの回転角度が反映されたロボットアーム移動時間をそれぞれ求める工程と、ロボットアーム移動時間が最も短くなるロボットアーム移動経路に対応する配置候補位置を最適な配置位置として決定する工程とを含むものである。
(もっと読む)
保持装置及び基板受け渡し方法

【課題】基板の保持性を高められ、ダストが発生せず、生産性に優れ、基板の受け渡しを円滑に行うことができる保持装置及び基板受け渡し方法を提供する。
【解決手段】搬送機構のハンド11の基板支持面11aの少なくとも一部に、電圧の大きさによって粘着力が可変な機能性粘着素子からなる保持部13を配置し、基板Wを搬送するときは、上記機能性粘着素子の粘着力で基板Wを保持し、ステージ12へ基板Wを移載するときは、上記機能性粘着素子の粘着力を消失させる。一方、ステージ12の上面から上方へ突出可能なリフターピン14の先端部にも上記機能性粘着素子からなる保持部15を配置し、リフターピン14で基板Wを支持するときは、リフターピン14の機能性粘着素子の粘着力で基板Wを保持し、上記搬送機構へ基板Wを移載するときは、リフターピン14の機能性粘着素子の粘着力を消失させる。
(もっと読む)
作業補助装置
【課題】作業者が対象物を移動する作業を補助する作業補助装置を提供する。
【解決手段】作業補助装置100は、把持装置10と、把持装置10を回転軸Qの回りに回転可能に連結する移動装置20を備える。対象物Wは把持装置10と作業者Tにより保持される。作業者Tが対象物Wを回転させると、作業補助装置は、対象物Wの姿勢角と目標姿勢角の偏差が小さくなる方向の回転を対象物に与えると推定される「回転軸の移動方向と移動量」を指定する第1移動指令値を算出する。第1移動指令値に従って移動装置を移動させる。把持装置10と移動装置20は回転可能に連結されているため、回転軸Qが移動する際の対象物Wの回転は回転軸Qと作業者Tの位置関係で規定される。作業者Tは、回転軸Qが移動する際の対象物Wの回転を理解しやすい。作業補助装置は、作業者Tが理解し易いように対象物Wを移動させることができる。
(もっと読む)
荷物搬送ロボット
【課題】荷物搬送ロボットに関し、小さな操作力で重い荷物3を効率よく積載、荷下ろしすることを目的とする。
【解決手段】走行部1を備えた荷台2と、
荷物3をハンドリングするアーム4とを有し、
前記アーム4は、荷台2に正対した床面5上の荷物3の荷台2側辺縁部を引き上げて荷物3を傾斜姿勢とした後、荷物3の裏面が荷台2辺縁により荷重支持された状態で荷台2側に引き込んで荷物3を荷台2上に移載するように構成する。
(もっと読む)
ネック部付き容器の個別支持装置およびかかる支持装置を使用した移送装置を備えた設備
【課題】本発明は、ネック部付き容器のための個別支持装置を提供する。
【解決手段】本発明は、ネック部により支持され、容器のネック部の内側に係合されうる支持部材を備え、支持部材が半径方向に弾性的に引き込み可能であり、ネック部の内壁に対して摩擦と共に支えうる支持要素を備え、支持部材が中央コアとコアを一定の半径距離で取り囲み、円形の外形の少なくとも1列の穴によって穴が開けるスカートをなす外壁との間で画定される周囲流路を備える略軸対称の円筒形ベース部と、穴と同数でそれぞれの穴と対向してチャンネルの中に少なくとも1つの列に配置された支持要素を形成し、直径が穴の直径よりも十分に大きい複数のボールと、ボールがそれぞれの穴の中に弾性によって押し返され、部分的に穴の外側に突出するようにコアとボールとの間に挿入された弾性戻し手段と、を備えることを特徴とするネック部付き容器のための個別支持装置に関する。
(もっと読む)
ロボットシステムのシミュレーション装置
【課題】オフラインで、撮像カメラの適正な設置位置を決定すると共に、検出パラメータを調整することを可能とさせるロボットシステムのシミュレーション装置を提供する。
【解決手段】シミュレーション装置30は、ロボットシステムの三次元モデルを表示装置32の画面上に表示し、ロボットと撮像カメラと周辺機器とを備えるロボットシステムのシミュレーションを行う。シミュレーション装置30は、三次元仮想空間を画面上に表示する表示装置32と、操作者によって指定された撮像範囲と、使用される撮像カメラの光学的特徴情報と、要求される計測精度とに基づいて、撮像カメラの設置位置を決定するカメラ位置決定部40と、三次元仮想空間における撮像カメラの位置とその光学的特徴情報に基づいて、撮像カメラにより取得されるべき仮想的な画像を生成する仮想画像生成部42とを備え、撮像カメラの適正な位置の決定及び検出パラメータの調整を容易にさせる。
(もっと読む)
支持体へのツールの迅速な組み立てのための装置
ツールの支持体へのツールの迅速な組み立てのための装置であって、上記支持体に取り付けられて貫通孔部(10)を有するボア(14)内に配置されたボルト(15)と、マンドレル(12)と、を備え、マンドレル(12)は、ツールに取り付けられて上記貫通孔部(10)内に配置され、上記ボルトと接触する。ツールとその支持体との間の結合部において、装置は、ホゾ部(11)及びホゾ穴部(13)の組からなるセンタリング及びロック手段を備え、組は、マンドレル(12)に垂直に延在してこれにより組立体のT字状の構造体を形成し、構造体は、ツールに高い剛性を付与する。上記組立装置は、特にアクチュエータまたはプライヤ、すなわちフラスコ、ボトルまたは同様のものの梱包のための機会に使用されるツールのようなツールに適している。 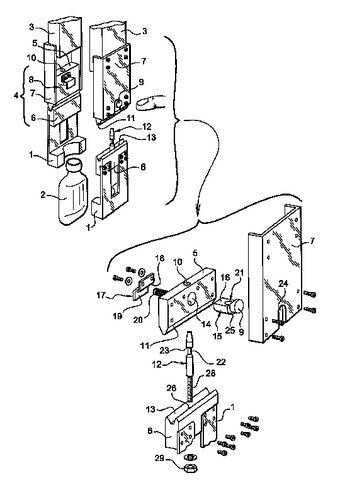 (もっと読む)
(もっと読む)
機械制御装置
【課題】可搬式操作部と機械の制御を行う制御部間の通信を非有線で行う際、単一の故障で機械の非常停止動作の安全機能が損なわれることのないように多重化されたハードウエア回路と最小限の通信回路を有しながら信頼性を確保した通信プロトコルによって信頼性の高い非常停止通信を行うことができる機械制御装置を提供する。
【解決手段】ロボット制御装置30は、制御部20における第3CPU22、第4CPU23のそれぞれが、通信データに含まれるモニタ結果及び予め定められた通信プロトコルに従って作成された通信エラー検出データを解析する。そして、第3CPU22、第4CPU23がモニタ結果及び通信エラー検出データの解析結果に応じて第1電磁接触器制御回路26、第2電磁接触器制御回路27にOFFの制御信号を出力することにより、モニタ結果や通信エラーの内容に応じてロボットのモータM41への電力が遮断される。
(もっと読む)
カートン自動開封システム
【課題】カートン内に収容された内袋をカートンから分離し、且つ内袋から包装物を自動的に取り出すことができる、省スペースで簡単な構造からなるカートン自動開封システムを提供する。
【解決手段】包装物を包装した内袋が収納されたカートン10の底部フラップを開封する底部開封ステーション4、カートンから内袋を分離する分離ステーション5、分離された内袋から包装物を受け取る包装物受取りステーション6を備え、作業ロボット2でカートンを把持して各ステーション間でのカートンの移動を行うようにしてなり、分離ステーションには仮ホッパを備え、カートンから分離された内袋を支持し、内袋を袋把持具で把持された状態で仮ホッパを包装物受取りステーションに向かって作業ロボットで反転駆動することにより、前記内袋から前記包装物受取りステーションに取り出す。
(もっと読む)
教示装置および教示方法
【課題】複数のワークの把持位置を共通化することにより、ピッキングロボットへの教示工数を低減することが可能な教示装置を提供する。
【解決手段】整列されている複数のワークそれぞれについて、ロボットハンドによる把持可能位置を算出する算出手段と、ワーク毎に算出される少なくとも一つの把持可能位置のうち、より多数のワークに共通する把持可能位置を、当該把持可能位置が共通するワークをロボットハンドが把持する際の把持位置に決定する決定手段と、を有する。
(もっと読む)
非ホロノミックマニピュレータ
【課題】 劣駆動マニピュレータは、軽量、低コスト化が見込まれて種々の研究がなされているが、制御が難しく実用化の例は少ない。劣駆動マニピュレータの利点を活かしかつ制御をやさしくするような構成法が課題であった。
【解決手段】 遊星ギアユニットのプラネタリギアキャリアに第一リンクを固定し、リングギアに第二リンクを固定し、これらに第三リンク、第四リンクを追加してパンタグラフを構成する.またサンギア回転軸にアクチュエータを設けた構成とする。こうすると劣駆動マニピュレータでありながら、簡単な比例制御でハンド部を任意の円軌道や任意角度の直径軌道を動かすことができることを確認した。
(もっと読む)
部品ピックアップ装置および部品ピックアップ方法
【課題】大きなコストアップを招くことなく、簡易な構成で部品のピックアップ作業を行えるようにする。
【解決手段】ロボット1のアーム11の先端部にホーキマニピュレータ13と、チリトリトレイ33を取り付ける。ホーキマニピュレータ13は、先端にホーキ部31を備え、部品箱5内の部品7を、水平方向にずらすようにして移動させることで、チリトリトレイ33に移載する。
(もっと読む)
吸着ノズル
【課題】吸気孔等の加工精度や、多軸搭載ヘッドにおける軸の直列精度が低い場合でも、吸気孔の開口端の大きさや形状の影響を受けることなく、微小部品をも容易且つ確実に吸着・保持できるようにする。
【解決手段】先端に形成されている吸気孔12の開口端14を部品Pに当接し、該吸気孔12内を負圧にすることにより該部品Pを吸着・保持する吸着ノズル10において、前記開口端14を含む、少なくとも吸気孔12の一部に多孔質材料が充填された多孔質部16を形成した。
(もっと読む)
燃料電池スタックの積層方法及び燃料電池製造用スタック装置
【課題】ロボットの停止精度やハンドリングの位置バラツキがあってもこれらを除去でき、ワークを確実に突き当て部材に密着させて位置決めさせることのできる燃料電池製造用スタック装置を提供する。
【解決手段】金属板からなるセパレータ15と膜電極接合体14を搬送用ロボット24に取り付けたハンドリング装置で第1突き当て部材17及び第2突き当て部材18を備えた積層装置に交互に積層する燃料電池製造用スタック装置であって、吸着パッド25を有した把持手段26でセパレータ15又は膜電極接合体14を吸着保持し、その保持したセパレータ15又は膜電極接合体14を第1突き当て部材17及び第2突き当て部材18に突き当てたときに、搬送用ロボット24の停止精度や把持手段26とワークとの位置のバラツキによって突き当て部材にワークが強く衝突したときの衝撃をコイルバネ31、35などから構成される衝撃吸収手段で吸収するようにする。
(もっと読む)
ロボット、ロボットシステム及びハンド装置の姿勢制御方法
【課題】ハンド装置の剛性を高めることができ、ロボットの大型化やコストの高騰を抑制する。
【解決手段】ロボットシステム100は、複数のハンド51,52と、各ハンドの一端を上下動させて、当該ハンドにおけるワーク12の把持面の水平面に対する傾斜角度を変化させる上下動機構53と、ハンドへのワークの積載状況やハンドの動作状況毎にハンドにおけるワークの把持面を水平面に一致させたときの回転軸61の回転角度を対応付けて記憶する記憶手段と、回転軸の回転角度を検出する検出手段と、検出手段により検出された回転軸の回転角度が、当該検出されたときのハンドへのワークの積載状況やハンドの動作状況に一致する記憶手段に記憶されたハンドへのワークの積載状況やハンドの動作状況に対応する回転角度となるように駆動手段62により回転軸を回転させる制御を行う制御手段と、を備える。
(もっと読む)
多関節ロボット
【課題】動作経路上に障害物があってもワークを把持するように経路変更でき、狭所空間で作業ができる多関節ロボットを提供する。
【解決手段】アーム1の長手方向に対して垂直な回動軸14のまわりに回転する手首部2と、前記部手首部2に取り付けられ、前記回動軸14に対して垂直な回動軸15のまわりに回転する回転部3と、前記回転部3に取り付けられた第2手首リンク10と、前記第2手首リンク10の他端が取り付けられた第4手首リンク12と、前記第4手首リンク12の他端が取り付けられた第3手首リンク11と、前記第3手首リンク11の他端が取り付けられた第1手首リンク9と、前記第1リンク9の他端が前記手首部2に取り付けられて平行四辺形を形成するリンク機構と、前記第3手首リンク11に取り付けられたワーク把持装置13とからなり、前記ワーク把持装置13を前記回動軸15を中心に旋回させる回動部が前記手首部2に備えられる。
(もっと読む)
基板搬送装置
【課題】 基板吸着エラーを未然に回避できる信頼性の高い基板搬送装置を提供する。
【解決手段】 基板吸着部の真空圧を検出し、検出された圧力データの演算処理を行うことにより、次に処理する基板の吸着部真空圧の変化を予測する手段及び、基板保持状態を判別する手段及び、吸着部真空圧の圧力値に応じた加速度変更手段及び、基板吸着面のクリーニング手段を備える。これにより、基板吸着面に付着する異物による吸着部真空圧の上昇によって起こる搬送装置の吸着エラーに対して、未然に吸着エラーを予測し警告信号を出力する。吸着エラーが発生する前に吸着面のクリーニングを効率よく実行することで装置の生産性を低下させない。また、突発的な吸着エラーに対しては基板保持状態を判別し、吸着圧力に応じて搬送加速度を変更することで安全に基板搬送を続行可能とする。
(もっと読む)
ウェハ搬送ハンド
【課題】空気通路のメンテナンスが容易で、ロボットに再ティーチングを行なわなくても、ウェハをチャックにセットできる薄形のウェハ搬送用ハンドを提供する。
【解決手段】上面にウェハ吸着面を持つ薄板状のハンド本体(13)が、その後端部(305)にて、ロボットアーム(19)上で支持される。ハンド本体(13)は、ロボットアーム(19)に対して、ウェハ吸着面に垂直な方向へ移動可能なように弾性的に支持される。ハンド本体(13)内の空気通路(307)はハンド本体(13)の下面から掘られた溝であり、そこに蓋(323)が被せてある。ハンド本体(13)の下面の蓋(323)を覆う領域に樹脂テープ(325)が貼られ、樹脂テープ(325)が空気通路(307)の蓋(323)の周囲の隙間を封止する。樹脂テープ(325)を剥がし蓋(323)を外すと、空気通路(307)の掃除ができる。
(もっと読む)
ハンドリング装置
【課題】異なる部品を扱う上での柔軟性のレベルが高いハンドリング装置を提供する。
【解決手段】ハンドリング装置11は、キャリアユニット12を備える。キャリアユニット12は、ロボットアームに連結するための連結部13と、複数の作動モジュール14と、を備える。複数の作動モジュール14のそれぞれは、作動装置18を取り付けるための少なくとも1つの取付インターフェース17を備える。作動モジュールのそれぞれには、取付インターフェースの位置を設定するための調整手段が設けられる。調整手段は、制御装置からの電気的な制御信号によって制御される、複数の位置設定駆動部19、20,21を備える。複数の位置設定駆動部19、20、21は、x,y,z座標系を有するデカルト座標系におけるx方向、y方向およびz方向に取付インターフェースを移動できる。
(もっと読む)
搬送ロボット及び搬送プログラム
【課題】コップなどの容器に液体が入っていることを自動で検出し、容器を水平状態に維持する制御を行って搬送する搬送ロボットを提供する。
【解決手段】搬送する容器8の傾きを調節する傾動手段16と、容器8を搬送する際に要求される搬送姿勢情報を取得する搬送姿勢情報取得手段50と、搬送姿勢情報に水平状態を維持する旨の情報が含まれている場合には傾動手段16に対して容器を水平状態に維持する制御指令を出力する姿勢制御手段82と、容器8の内容物7が流動物であると検知した場合には容器8を水平状態に維持する旨の搬送姿勢情報を生成する流動物検知手段80と、傾動手段16が持ち上げた容器を搬送する搬送手段14とを備えた。
(もっと読む)
121 - 140 / 257
[ Back to top ]