
Fターム[3D232DD05]の内容
走行状態に応じる操向制御 (73,124) | 制御方式 (7,388) | 制御ゲインの設定 (997)
Fターム[3D232DD05]の下位に属するFターム
制御ゲインが変更可能なもの (614)
Fターム[3D232DD05]に分類される特許
21 - 40 / 383
電動パワーステアリング装置
【課題】電流センサが故障した場合でも、アシスト制御中にモータの断線や短絡といった異常を検出できるようにする。
【解決手段】電流センサ異常検出部91により電流センサ31の異常が検出された場合、基本電圧演算部81が目標電流I*に比例した基本電圧V0を計算し、電圧値重畳部83が、基本電圧V0に、交流電圧信号生成部82から出力された交流電圧信号である重畳信号V1を加算して電圧指令値V*を求める。モータ異常検出部92は、操舵トルクtrの振動の大きさを計算し、振動の大きさが基準値未満となる場合には、モータ20の通電路に異常が生じていると判定する。
(もっと読む)
加加速度情報を用いた車両の運動制御装置および方法

【課題】非定常な車両加減速状態を含む車両のダイナミクスの変化に応じて、制御ヨーモーメント量を調整すること。
【解決手段】車両のヨーモーメントを制御する制御手段を備えた車両の運動制御装置において、車両の前後方向の速度を検出する第1の検出手段と、車両の横方向の加加速度を検出する第2の検出手段と、を有し、前記制御手段は、前記第2の検出手段により検出した車両の横方向の加加速度(Gy_dot)を、前記第1の検出手段により検出した車両の前後方向の速度(V)で除した車両のヨー角加速度(r_ref_dot)に基づいて車両のヨーモーメントの制御指令を生成し、前記制御指令を出力する車両の運動制御装置。
(もっと読む)
車両運動制御装置及びプログラム
【課題】ドライバの視線と走行路との交点に到達するまでの時間が小さい状況における車両軌跡追従特性のダンピンの悪化を改善し、軌跡追従特性に優れた車両運動を実現する。
【解決手段】注視時間算出部30で、内向きカメラ12で撮像されたドライバの顔画像、外向きカメラ14で撮像された車両前方画像、及び車速センサ16で検出された車速Vに基づいて、注視時間Tを算出し、注視時間判定部32で、注視時間Tが予め定めた閾値Tthより小さいか否かを判定し、T<Tthの場合には、ダンピング変更部36で、ヨー角検出部34で検出された自車両のヨー角θと目標軌跡のヨー角θdとの差と、予め定めたダンピング特性とフィードバックゲインkp1との関係を示すテーブルに基づいて取得された必要なダンピング特性を得るためのkp1との積で表される偏差フィードバックδf_addを算出し、前輪舵角装置20へ出力する。
(もっと読む)
作業車両
【課題】作業車両の傾斜地での直進走行性能を向上できるようにする。
【解決手段】左右の走行駆動輪11・12と、左右の走行駆動輪11・12の前方または後方に配置される補助輪(キャスタ輪13・14)と、前記左右の走行駆動輪11・12をそれぞれ回転駆動する左右一対の電動モータ15・16と、左右の走行駆動輪11・12の回転速度をそれぞれ検出する回転速度検出手段(回転速度センサ17・18)と、進行方向及び車速を設定する操行手段となる旋回レバー21・22と、作業車両に発生するヨーレイトを検出するヨーレイトセンサ25と、前記操行手段より算出された目標ヨーレイトになるように前記左右電動モータ15・16の回転数を変速してヨー制御する制御装置50を備える作業車両において、操行手段で設定した進行方向が設定角度以内の直進走行の場合のみ、ヨー制御を行うようにした。
(もっと読む)
車両の走行制御装置
【課題】ドライバ操舵との干渉による違和感を緩和しつつ、操舵入力情報を検出するデバイスの機能失陥時においても好適な軌跡追従性を確保する。
【解決手段】車両の走行制御装置は、車両の軌跡が目標路に近付くように舵角可変手段を制御する軌跡制御手段と、車両の運転者によりハンドルを介して操舵入力軸に与えられる操舵入力に関する操舵入力情報を取得する取得手段と、取得された操舵入力情報に応じて軌跡制御手段による軌跡制御の応答性を変更すると共に、操舵入力が取得出来ない場合に軌跡制御の応答性を向上させる応答性変更手段とを具備する。
(もっと読む)
電動ポンプ装置
【課題】起動してから素早く必要な油圧を発生させることができるとともに、安定して油圧を供給することのできる電動ポンプ装置を提供する。
【解決手段】マイコン22は、モータ13の回転状態を維持することにより必要な油圧が変速機構に供給される安定状態であるか否かを判定し、安定状態である場合に電流フィードバック制御のゲインKを、起動状態で設定される高応答ゲインよりも小さな低応答ゲインに変更するPIゲイン設定部51を備えた。
(もっと読む)
電動パワーステアリング装置
【課題】トルクセンサが故障して操舵トルクを検出することができなくなった場合において、SAT(セルフアライニングトルク)が弱い極低速域での操作子の切り戻し時の操舵力を低減する電動パワーステアリング装置を提供する。
【解決手段】残留切り戻し角θsc3が残った状態で切り込み方向のアシスト電流Iaがゼロ値近傍となったときに回転角検出部により検出されている回転子回転角θscを基準角度θfとして切り戻し回転角θscを検出し、切り戻し回転角θscと特性102とに基づき、切り込み方向とは逆方向の切り戻し方向にモータを駆動するようにしたので、操作子の操作角が中立位置に近づく方向にアシストが可能となり、戻し側の操舵力を低減して、操作子を中立位置付近に戻し易くすることができる。
(もっと読む)
電動ステアリング装置
【課題】運転者にとって期待される安定した修正操舵の実施を可能とする電動ステアリング装置を提供する。
【解決手段】操舵トルクTに基づいて制御装置200Aにより制御されて操舵補助力を発生する電動機を11備えた電動パワーステアリング装置において、操向ハンドルに設けられて、運転者の操作により電気信号を出力する操作スイッチ2aL,2aRと、操作スイッチ2aL,2aRからの電気信号に応じて電動機11を駆動する電流を付加する付加電流値波形を演算して出力する付加電流演算部300Aと、を備えている。付加電流演算部300Aは、操作スイッチ2aL,2aRの運転者によるオン状態の時間の長短に関わらず、1回の操作に応じて、車両の走行状態情報に応じた所定の付加電流値IAdの電流波形を生成して出力する。
(もっと読む)
電動パワーステアリング装置
【課題】電動機の回転角センサの故障時に、推定回転角を用いて電動機の制御を行える電動パワーステアリング装置を提供する。
【解決手段】制御装置200は、レゾルバ50の故障を検出する故障検出部290、拡張誘起電圧に基づいて電動機11の回転角を推定する回転角推定部291を備える。レゾルバ50の正常の場合は、操舵トルクT及びレゾルバ50からの回転角θMに基づいて電動機11を駆動制御し、レゾルバ50の故障の場合は、操舵トルクT及び回転角推定部291によって推定された推定回転角θeMに基づいて電動機11を駆動制御する。また、ベース信号演算部220は、レゾルバ50の故障の場合に用いる第2ベーステーブル220bの第2の不感帯の幅を、レゾルバ50が正常の場合に用いる第1ベーステーブルの第1の不感帯の幅よりも拡大設定する。
(もっと読む)
電動モータユニットの検査装置及び検査方法
【課題】モータ制御装置と電動モータが一体となった組込みユニットに対応し、精度が高い電動モータの良否判定を行う。
【解決手段】電動モータユニット10に入力される入力トルク信号を取得し、電動モータMの出力トルクを検出し、電動モータMの温度を検出し、検出された電動モータMの出力トルクを温度で補正し、温度補正された電動モータMの出力トルクの、入力トルクに対する関係を、あらかじめ用意した電動モータの出力トルクの入力トルクに対する基準関係に近づけるように、電動モータユニット10内で電動モータMに供給されるモータ電流を補正する。このために補正に必要な値をEEPROM19に書き込む。
(もっと読む)
車両制御装置
【課題】舵角センサ等を用いないコスト低減を図った構成により車両の操舵角を認識してアイドルストップ等の制御を行なう。
【解決手段】ステアリングトルクとモータアシストトルクを加算するとセルフアライニングトルク(SAT)になることに着目し、アイドルストップ車1の舵角判定部42により、ステアリングトルクおよびモータアシストトルクに基づいてセルフアライニングトルクを推定し、推定したセルフアライニングトルクに基づき、舵角センサ等を用いることなくアイドルストップ車1の操舵角を認識し、右左折時のアイドルストップのエンジン停止の禁止等を行なう。
(もっと読む)
電動パワーステアリング装置
【課題】電源の電力消費とモータの出力特性とを限界以下に抑えることによって、トルク詰まりなどの違和感が出ないようにする。
【解決手段】電源の消費電力を推定し、操舵補助モータの出力を算出し、電源の消費電力が限界に近い場合、あるいはモータの出力特性が限界に近い場合、電力消費率に応じて補正されたモータ電流指令値Iq1*と、モータの出力率に応じて補正されたモータ電流指令値Iq2*との小さいほうに基づいて、前記操舵補助モータを制御する。
【効果】モータ電流指令値として、より低くなる方向に変化した値を適用することができるので、電力消費率やモータ出力率が急激に増大して、本来ならば電源やモータの出力特性が限界に達して操舵トルクの急激な増加が起こる場合に、この現象を予め避けることができる。
(もっと読む)
電動パワーステアリング装置
【課題】ハンドルの戻し時に操舵の回転方向によるステアリング装置各部や車両の回転方向でのフリクションの左右差の影響で、ハンドル戻り特性に左右差が生じてしまい、右と左の操舵からの戻りの戻しトルク感、戻り速度、戻り角の特性に大きなアンバランスが生じる欠点があった。
【解決手段】モータ回転速度が無負荷回転数相当となった場合の操舵トルクを、判定された電動モータの回転方向別に記憶するメモリ88と、タイヤが路面から受けるタイヤの路面反力に相当するトルクに対して、前記メモリ88に記憶された各電動モータの回転方向における操舵トルクの前記回転トルク既定値に対する割合を係数として、トルク左右差の調整をする回転トルクの左右差調整部87とを備え、前記基本アシスト制御部71によって決定されたアシストトルクに対して、回転トルクの左右差調整部87によって調整された路面反力に相当するトルクを減算することにより、ハンドル戻し制御を行う。
(もっと読む)
電動パワーステアリング装置
【課題】新たに設定されるモータ抵抗と実際のモータの抵抗との乖離を小さくすることのできる電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、操舵系にアシスト力を付与するモータを備え、このモータの抵抗を示す値であるモータRm抵抗を更新する。具体的には、モータの誘起電圧EXが第1判定値GAよりも小さいことに基づいて、モータ抵抗Rmを更新する。また、誘起電圧EXが第2判定値GBよりも小さいとき、モータ電圧Vmをモータ電流Imにより除算した値である除算値を新たなモータ抵抗Rmとして設定する。
(もっと読む)
電動パワーステアリング装置
【課題】モータの電力消費を限界以下に抑えるとともに、トルク詰まりなどの違和感が出ないように、電力消費率に応じて、モータへの制御量を変化させる。
【解決手段】操舵補助モータの消費電力を算出又は推定し、前記操舵補助モータの消費電力と所定の電力制限値との比に基づいて電力消費率Prateを算出し、算出された電力消費率Prateが1に近づくほど、モータ電流指令値Iq*を予め低下させる。
(もっと読む)
車両用操舵装置
【課題】伝達比可変機構の動作によって生じる操舵反力を測定するために用いられるトルクセンサが不要となり、トーションバーが不要となる車両用操舵装置を提供する。
【解決手段】目標act角演算部51は、act角θactの目標値である目標act角θact*を演算する。制御信号出力部52は、目標act角演算部51によって演算された目標act角θact*に基づいて、伝達比変更用モータ20の駆動回路29を制御する。目標反力補償角演算部61は、目標act角演算部51によって演算された目標act角θact*が零でない場合には、目標act角θact*に基づいて反力補償用モータ25の目標回転角である目標反力補償角θrec*を演算する。制御信号出力部62は、目標反力補償角演算部61によって演算された目標反力補償角θrec*に基づいて、反力補償用モータ25を制御する。
(もっと読む)
操舵制御装置
【課題】左右異摩擦係数路面上での制動時に、ドライバのカウンタステア時の負荷を低減する操舵制御装置を提供する。
【解決手段】転舵アクチュエータ8と、操舵反力アクチュエータ6と、スプリットμ検出部20(左右異摩擦係数路面制動検出手段)と、自動カウンタステア演算部19(付加転舵角演算手段、増加操舵反力演算手段)と、前輪転舵角演算部21(転舵角制御手段)と、操舵反力演算部22(操舵反力制御手段)とを設けた。左右異摩擦係数路面上での制動時に、車両に発生するヨーモーメントを低減するように転舵輪を転舵することにより増加する操舵反力を低減するようにした。
(もっと読む)
狭路走行支援装置、狭路走行支援方法
【課題】狭路を走行する際に、運転者に対して適切なステアリング操作を直感的に促す。
【解決手段】ソナー11L及び11Rによって、走路境界との距離yL及びyRを検出し、検出結果に応じて狭路支援制御の介入が必要か否かを判断する(S103)。制御介入が必要であると判断したら、最終トルク指令値Ifに対して制御介入し、操舵支援を行う(S105)。ここでは、回避トルク指令値Iaと助勢トルク指令値Isとの加算によって最終トルク指令値Ifを演算する(S205)。回避トルク指令値Iaは、走路境界から離れる方向の支援トルクとなる。一方、助勢トルク指令値Isは、運転者の操舵方向と同一の支援トルクとなるので、運転者の操舵方向が走路境界に向かっていれば、この助勢トルク指令値Isを減少補正することで、走路境界に対する接近が抑制される。
(もっと読む)
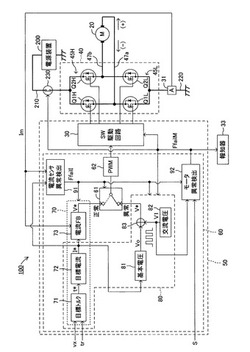
モータ制御装置
【課題】 演算負荷を高めずに精度良く誘起電圧を計算して電気角を推定する。
【解決手段】 簡易誘起電圧演算部111は、モータ20のインダクタンスLによる電圧成分(L・dI/dt)を含めない簡易誘起電圧e’を計算する。補正ゲイン設定部113は、補正ゲインマップを参照して、q軸指令電流Iq*が大きくなるほど小さくなる補正ゲインKLを設定する。誘起電圧補正部114は、簡易誘起電圧e’に補正ゲインKLを乗算して誘起電圧eを求める。これにより、微分演算処理を行わずに精度良く誘起電圧を計算することができる。
(もっと読む)
後輪操舵制御装置
【課題】 悪路走行時等に運転者が車両挙動に違和感を覚えることを抑制すべく、それぞれの輪荷重に応じて左右後輪の目標舵角を補正する後輪操舵制御装置を提供する。
【解決手段】 左右後輪3rl,3rrの輪荷重変動量のどちらか一方が判定閾値を超え、ステップS6の判定がYesになった場合、操舵ECU7は、ステップS7で、左右後輪3rl,3rrのうち輪荷重変動量が判定閾値を超えた方の悪路走行時目標舵角に対し、輪荷重変動量の値に応じた補正係数(0、あるいは、1より小さな値)を乗じた後、ステップS4に移行して補正後の悪路走行時目標舵角が得られるように左右後輪操舵アクチュエータ17l,17rを駆動する。
(もっと読む)
21 - 40 / 383
[ Back to top ]